基于MUSIC算法的近场空速估计
2015-10-25陶建武钱立林
虞 飞, 陶建武, 曾 宾, 钱立林
(1.海军航空工程学院控制工程系,山东 烟台 264001;2.空军航空大学飞行器控制系,吉林 长春 130022)
基于MUSIC算法的近场空速估计
虞 飞1,2, 陶建武2, 曾 宾1, 钱立林2
(1.海军航空工程学院控制工程系,山东 烟台 264001;2.空军航空大学飞行器控制系,吉林 长春 130022)
研究了基于声矢量传感器阵列的近场空速估计问题。首先,在声矢量传感器近场阵列输出模型的基础上,考虑声波在连续、均匀稳定气流中的传播原理,构建了稳定气流作用下近场质点振速测量模型,模型导向矢量中包含了待估计的空速信息。在此基础上,提出了一种近场空速估计的MUSIC算法,为评价算法估计性能,推导了空速估计的克拉美-罗界表达式。仿真实验验证了算法的有效性。
计量学;空速估计;声矢量传感器阵列;近场;MUSIC
1 引 言
随着航空航天技术的飞速发展,要求现代飞行器应具备在大马赫数、大迎角条件下飞行的能力。而传统的基于空速管的大气数据测量系统不能满足这种高超声速、高机动性飞行器的设计要求。为此,美国国家航空航天局的Dryden研究中心研究了一种新型的大气数据测量系统,即嵌入式大气数据传感系统(Flush Air Data Sensing,FADS)[1~3]。与传统的大气数据测量系统相比,它在精度、可靠性上都有更大优势,没有突出的空速管,因而具有一定的隐身性能。但在实际应用中,FADS系统存在一些难题。FADS系统在计算飞机的空速时,所需要的动压数据是通过迭代算法得到的,而动压测量模型是非线性的,且计算过程中的校正参数需要通过风洞试验来标定。究其原因,是此系统仅能测量一个标量物理量——压力。输入信息的缺少必然造成系统的空气动力学模型复杂,从而导致出现上述问题。
声矢量传感器是由3个相互垂直放置的质点振速传感器和一个可选择的压力传感器组成的新型传感器。它可以同步测量流场同一点处质点振速矢量和压力[4]。如果采用声矢量传感器构成一种新型的FADS系统,可以利用矢量传感器的测量值直接计算空速,从而简化了系统空气动力学模型,省去了校正参数的风洞标定,加速了FADS系统的实用化。基于这一思想,文献[5,6]将声矢量传感器应用于飞机上的FADS系统中,接收声源产生的声波,测得声场中某点的质点振速矢量,再通过解算得出飞机的空速。该方法不需要进行复杂的风洞试验来校正参数,节省了大量物力和财力。其缺点在于仅采用单个声矢量传感器来测量空速,使得系统在抗干扰能力和测量精度上难以满足实际要求。文献[7]提出了一种基于声矢量传感器阵列的鲁棒H∞空气速度估计算法,确切地说,它属于多传感器信号处理方法,因为它是通过多个传感器测量结果之间的数学迭代来提高空速测量的精度,而并未利用到传感器阵列信号处理中接收数据的统计特性。文献[8]虽然使用了声矢量传感器阵列的统计特性,但只是简单地将各矢量阵元的接收数据排成一个列矢量,没有考虑各阵元之间的内在联系,使得阵列信号处理中的很多代表性算法难以运用其中。为此,本文基于声矢量传感器阵列,提出了一种近场空速估计的MUSIC算法(MUSIC Airspeed Estimation,MUSICASE)。首先,在声矢量传感器阵列近场阵列输出模型的基础上,考虑声波在连续、均匀稳定气流中的传播原理[9],构建了稳定气流作用下近场质点振速测量模型。模型中考虑了矢量传感器各阵元之间的空间相位差信息,其导向矢量中包含了我们感兴趣的空速信息。然后,提出了一种近场空速估计的MUSIC算法,该算法能够有效估计出稳定气流的速度,并且具有很高的估计精度。此外,为评价算法估计性能,推导了空速估计的克拉美-罗界(Cramér-Rao bound,CRB)表达式。
2 近场空速测量的阵列模型
本文考虑的声矢量传感器由3个质点速度传感器组合而成,它们在空间同一点处正交放置,同时接收空间中3个正交方向的声波质点振速分量。假设测量装置为一圆柱型管路,管路内径为D,声源和声矢量传感器阵列安装于内管壁,具体管路剖面示意图可参照文献[7]中的图2所示。
显然,声源位于声矢量传感器阵列的近场区域,由文献[10]可知,单个声矢量传感器的近场阵列流型为

式中,θ∈(-π/2,π/2](从z轴测量)和φ∈[0,2π)分别表示入射波的俯仰角和方位角。
考虑由M+1个上述声矢量传感器构成的均匀线性阵列,阵元沿着y轴正方向排列,并对各阵元依次编号为0,1,…,M。为简化模型,设理想气流以恒定速度v顺着管路从-y方向吹来。当v=0时,声波以声速c向四周均匀传播,各个时刻声波的波前是同心的球面,以第0个阵元为参考阵元,则阵元m接收的信号可以表示为[11]

式中,s(t)为参考阵元接收的声波信号,nm(t)表示阵元m上的3×1维的加性高斯白噪声矢量,τm为声波到达第m个阵元时相对于该信号到达参考阵元的相位延迟。τm可以通过Fresnel近似表示为[12]
式中,λ为声波信号的波长,r为声源到参考阵元之间的距离,d表示相邻阵元的间距。则式(2)可以近似表示为

由于本文假定空气以速度v顺着-y方向流动,则r方向上声波传播的绝对速度为cr=c+ v sin θ sin φ,其中,。当介质顺着管路运动时,声波传播途径中的每一点都可看作声源,每一点的移动和空气流动都是一致的,如文献[7]中图1所示,在O处的质点振速应该等于当v=0时O′处的质点振速。当v=0时,波前到达O′处的时间为而当v=const≠0时,波前到达O处的时间为

3 近场空速估计的MUSIC方法

4 仿真实验
考虑在均匀恒温的稳定气流中,有一个单频声波入射到由10个声矢量传感器构成的均匀线阵,相邻两个阵元的间距取为声波波长的一半,即:d=λ/2。设声波信号的频率为6 800 Hz,则声波的波长为λ=0.05 m,气流速度为300 m/s,声源的空间位置设为S(λ,8λ,λ),则声源的方位参数(θ,φ)和距离参数r分别为(82.929 4°,82.875 0°)和8.124λ。加性噪声假设为零均值高斯白噪声,信噪比SNR定义为:SNR=10 lg(Ps/Pn),单位:dB,Ps和Pn分别为声波信号和噪声的平均功率。如无特殊说明,仿真实验中,取SNR=15 dB。
4.1实验1:速度估计的谱峰
假设声矢量传感器阵列对稳定气流中的声波信号进行了N=800次采样,图1给出了空速估计的谱峰图。从仿真结果可以看出,本文方法在真实的空速处形成了谱峰,而且没有出现“伪峰”,可以成功地估计出气流速度。
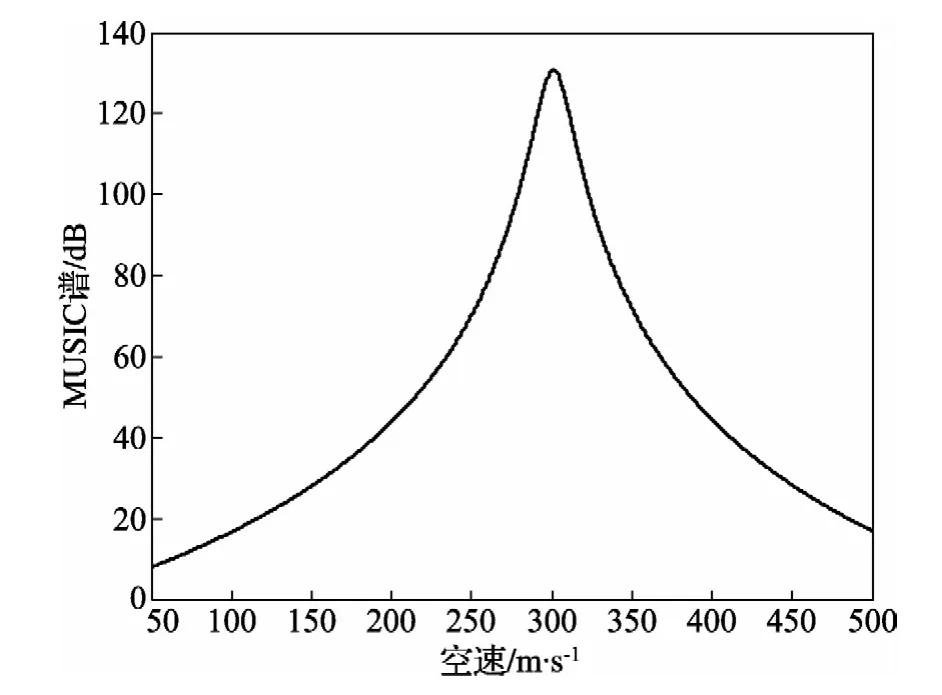
图1 空速v=300 m/s时的谱峰图
4.2实验2:算法的统计性能分析
(1)信噪比对估计的影响
假设声矢量传感器阵列对稳定气流中的声波信号进行了N=1 500次采样,对本文提出的空速估计算法(MUSIC-ASE)进行50次Monte Carlo仿真实验,得出空速估计v^的均方根误差(Root-Mean-Square Error,RMSE)随信噪比的变化曲线,并给出了相应的CRB曲线,如图2所示。从仿真图可以看出,随着信噪比的增大,采用MUSIC-ASE算法估计的空速v^的RMSE是逐渐减小的,说明算法对空速的估计精度越来越高。尤其在高信噪比时,本文算法的RMSE与CRB越来越接近,说明估计误差的方差接近于最小值。
(2)快拍数对估计的影响

图2 空速估计的RMSE随信噪比的变化曲线
快拍数就是一段时间内对阵列数据的采样个数。对本文提出的空速估计算法(MUSIC-ASE)进行50次Monte Carlo仿真实验,得出空速估计v^的均方根误差(RMSE)随快拍数的变化曲线,并给出了相应的CRB曲线,如图3所示。从仿真图可以看出,随着快拍数的增加,采用MUSIC-ASE算法估计的空速v^的RMSE是逐渐减小的,说明算法对空速的估计精度越来越高,并且算法的RMSE与CRB十分接近。
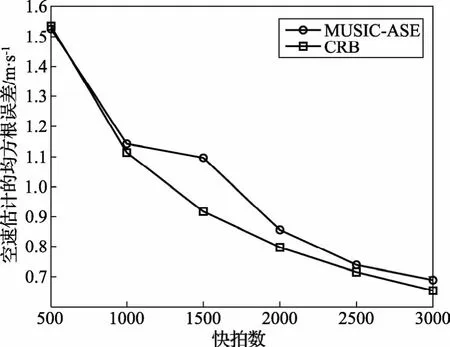
图3 空速估计的RMSE随快拍数的变化曲线
(3)算法在整个亚音速阶段的估计性能
由上述的声矢量传感器阵列对稳定气流中的声波信号进行N=1 500次采样,对本文提出的MUSIC-ASE算法进行50次Monte Carlo仿真实验,得出空速估计v^的均方根误差(RMSE)随着空速的变化曲线,并给出了相应的CRB曲线,如图4所示。由仿真结果可以看出,随着空速的变化,采用本文提出的MUSIC-ASE算法估计的空速v^的RMSE保持在较小的误差范围(低于1 m/s)内波动,说明在整个亚音速气流作用阶段,MUSIC-ASE算法都能有效地估计出气流的速度,且估计误差的方差接近于CRB。
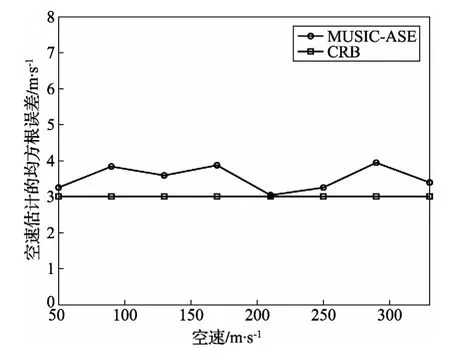
图4 空速估计的RMSE随空速的变化曲线
5 结 论
本文提出了一种近场空速估计的MUSIC算法(MUSIC-ASE)。首先,在声矢量传感器阵列近场阵列输出模型的基础上,考虑声波在连续、均匀稳定气流中的传播原理,构建了稳定气流作用下近场质点振速测量模型。基于此模型,提出了一种近场空速估计的MUSIC算法,为评价算法估计性能,推导了空速估计的CRB表达式。仿真结果表明,MUSICASE算法能够有效估计出稳定气流的速度,并且具有较高的估计精度。
[1] Whitmore S A,Cobleigh B R,Haering E A.Design and Calibration of the X-33 Flush Airdata Sensing(FADS)System[R].NASA/TM-1998-206540,1998.
[2] Baumann E,Pahle J W,Davis M C.X-43A Flush Airdata Sensing System Flight-Test Results[J].Journal of Spacecraft and Rockets,2010,47(1):48-61.
[3] Ellsworth J C.An Analytical Explanation for the X-43A Flush AirDataSensingSystemPressureMismatch between Flight and Theory[C]//28thAIAA Applied AerodynamicsConference.Chicago,Illinois,AIAA 2010-4964,2010.
[4] Wu Y I,Wong K T.Acoustic Near-Field Source-Localization by Two Passive Anchor-Nodes[J].IEEE Transactions on Aerospace and Electronic Systems,2012,48(1):159-169.
[5] 王立新,陶建武,郭伟.基于矢量传感器的大气数据测量方法[C]//中国自动化学会.2009中国自动化大会暨两化融合高峰会议论文集.杭州.2009,11.T9:135.
[6] 王立新,陶建武.一种新型的大气数据测量方法[J].计量学报,2011,32(1):31-35.
[7] 陈诚,陶建武.基于声矢量传感器阵列的鲁棒H∞空气速度估计算法[J].航空学报,2013,34(2):361-370.
[8] Chen C,Tao J W,Zeng B.Estimation of Airspeed Based on Acoustic Vector Sensor Array[C]//2012 IEEE 11th International Conference on Signal Processing(ICSP),Beijing.2012,307-310.
[9] 杨训仁,陈宇.大气声学[M].北京:科学出版社,2007.
[10] Wu Y I,Wong K T,Lau S K.The Acoustic Vector-Sensor’sNear-FieldArray-Manifold[J].IEEE Transactions on Signal Processing,2010,58(7):3946-3951.
[11] Swindlehurst A L,Kailath T.Passive directions of arrival and range estimation for near-field sources[C]// Fourth Annual ASSP Workshop on Spectrum Estimation and Modeling,Minneapolis,MN.1988,123-128.
[12] ZhiWanjun,ChiaMY-W.Near-fieldsource localization via symmetric subarrays[J].IEEE Signal Processing Letters,2007,14(6):409-412.
[13] 马文蔚.物理学教程(下册[)M].北京:高等教育出版社,2002.
[14] Grosicki E,Abed-Meraim K,Hua Y.A weighted linear prediction method for near-field source localization[J]. IEEE Transactions on Signal Processing,2005,53(10):3651-3660.
[15] Stoica P,Larson E G,Gershman A B.The Stochastic CRB for Array Processing:A Textbook Derivation[J]. IEEE Signal Processing Letters,2001,8(5):148-150.
Near-field Airspeed Estimation Based on MUSIC Algorithm
YU Fei1,2, TAO Jian-wu2, ZENG Bin1, QIAN Li-lin2
(1.Department of Control Engineering,Naval Aeronautical and Astronautical University,Yantai,Shandong 264001,China;2.Department of Aircraft Control Engineering,Aviation University of Air Force,Changchun,Jilin 130022,China)
The problem of near-field airspeed estimation is researched based on acoustic vector sensor array.According to the propagation principle of acoustic waves in a continuous,uniform and stable air flow,the acoustic particle velocity measurement model based on the near-field output model of acoustic vector sensor array is constructed.The airspeed knowledge of interest is included in the steering vector of the proposed measurement model.Then a multiple signal classification algorithm for airspeed estimation is presented.To evaluate the performance of the proposed algorithm,a compact expression for the Cramér-Rao bound on the estimation error of the airspeed is derived.Simulation results are shown to verify the efficiency of the proposed algorithm.
metrology;airspeed estimation;acoustic vector sensor array;near-field;multiple signal classification
TB934
A
1000-1158(2015)05-0477-05
10.3969/j.issn.1000-1158.2015.05.07
2013-12-17;
2014-03-01
国家自然科学基金(61172126);国家自然科学基金青年科学基金(61203355)
虞飞(1987-),男,江西九江人,海军航空工程学院博士研究生,主要研究方向为矢量传感器阵列信号处理及其应用、传感器与智能测量系统。yufei19871128@163.com