探地雷达在填土下部空洞检测中的试验研究
2015-08-01赵得杰张永涛郎海鹏
赵得杰,张永涛,郎海鹏
(1.石家庄铁道大学 土木工程学院,河北 石家庄 050043;2.中建国际投资(中国)有限公司,广东 深圳 518000)
0 引 言
道路在我国经济建设中占有十分重要的地位,其工程质量直接关系着人民的生命安全和国家的财产[1].近年来,随着我国经济的快速发展,道路建设的速度也越来越快,同时,对已有道路的检测也越来越重要,尤其是对路基填土的空洞探测[2].目前,我国传统的路基检测方法几乎都是破损试验,而且信息少、速度慢、代表性差、偶然性大,已不能满足公路运输飞速发展的需求[3].
随着科学技术的飞速发展,探地雷达(GPR)以其经济、无损、快速而直观的特点成为无损检测中最主要的工具之一[4].但目前对探地雷达没有统一的标准,其检测结果的准确性很大程度上依赖于检测人员的经验,所以只能作为一种辅助手段[5].为对该问题进行详细研究,本研究制作了双层填土空洞缺陷模型,利用LTD-2100 型探地雷达进行试验,分别用400 MHz、600 MHz、900 MHz 天线对检测点进行扫描,对图像进行特殊处理,得出了一些有益的结论.
1 试验设计
1.1 模型设计
路基填土遇水在自重作用下容易产生空洞,为提高探地雷达对空洞探测的准确性,本研究在实验室内对其进行了试验研究.该试验在土槽中进行,土槽的设计尺寸为3 m ×1.3 m ×1.2 m(长× 宽×高),为了避免土槽壁反射波对探测结果的影响,试验在土槽中部1m 的范围内进行.
多管线干扰下填土空洞探测模型设计(见图1)本研究主要分析上部管线对下部空洞的影响.
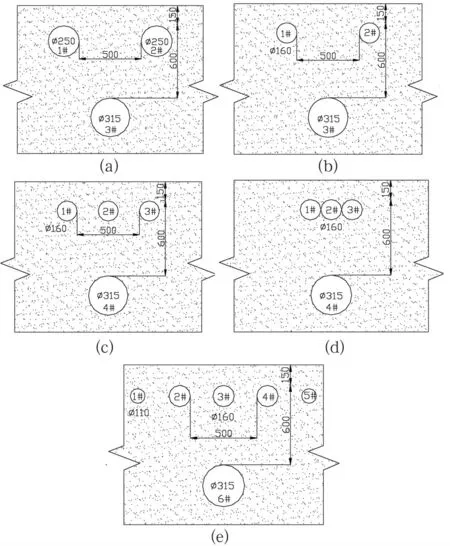
图1 多管线干扰下填土空洞探测模型
图1(a)、(b)为双管线干扰模型,图1(a)中双管线直径为250 mm,管内侧间距为500 mm;图1(b)中双管线直径为160 mm,管内侧间距为500 mm;图1(c)、(d)、(e)为多管线干扰模型,图1(c)中3 管线直径为160 mm,最外侧2 根管内侧间距为500 mm;图1(d)中3 管线直径为160 mm,管线间距为0;图1(d)中为5根管线,其中中间3 根直径为160 mm,管内侧间距为500 mm,两边2 根直径为110mm,距内侧160 mm 管线的距离为150 mm.模型使用管径为315 mm 的PVC 管模拟空洞.
1.2 参数设置
参数设置的具体步骤是:首先,设置天线频率,根据探测深度选择合适的视窗;其次,设置采样点数,最小采样点数必须大于垂向分辨率,一般为512点;再次,设置增益效果,分为整体增益和局部增益,一般情况为人工增益;最后,输入介电常数,并选择测量方法.
1.3 测线布置
本次测试共布设5 条测线,测线之间的间距为200 mm,以方便对图像进行对比分析.在对扫描图像进行解释时,选择最清晰的一条测线进行分析.
1.4 图像处理
本研究对扫描图像解析采用IDSP 6.0 软件,在数据处理之前,利用软件中的工程管理功能项,将每一工况的文件按工况名进行分类以便于数据处理.图像处理的具体过程为:首先处理在变换测线时产生的杂波,此类杂波并不是在扫描过程中产生的;然后选择合适的比例将扫描图像在窗口内全部显示,采用带通式FIR 滤波器滤波,滤波范围为所有采样点,滤波频率根据中心天线频率的不同选择不同的参数,窗函数选择矩形窗,还可以运用零点调节、自动增益、局部增益、消除背景与滑动平均等设置.
2 检测结果与分析
2.1 双管线(Φ=250 mm)干扰下空洞探测模型
双管线(Φ=250 mm)干扰下,不同频率雷达扫描图如图2、3 所示.
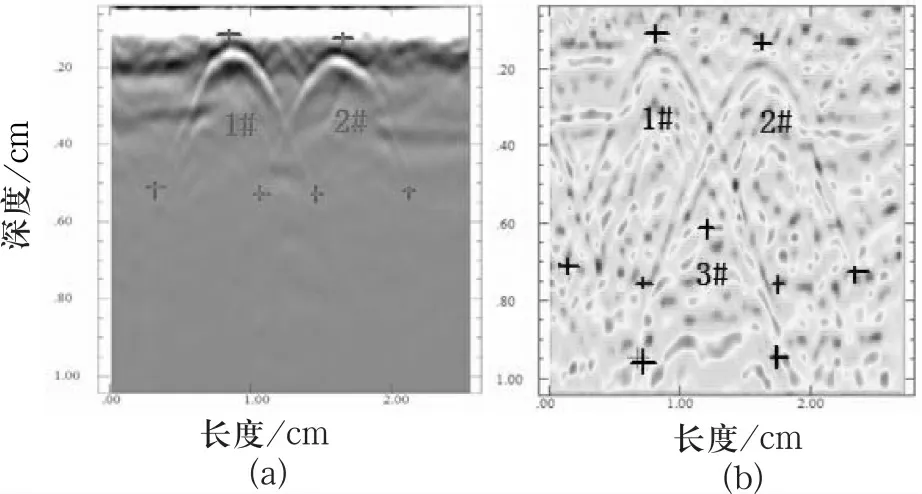
图2 双管线(Φ=250 mm)干扰下600 MHz 雷达扫描图

图3 双管线(Φ=250 mm)干扰下雷达扫描图
图2 为测线3 经过滤波、零线归位和增益处理后的空洞图像.可以清晰地看到,1#、2#管线的反射波形,并且2 根管线反射波的翼缘在中间相交,形成疑似空洞的图像.通过与模型图和纵坐标对比分析可知,该图像的埋深为350 mm 与下层空洞3# 埋深不符.在图2(b)中,通过与模型图和纵坐标对比分析可以直接看出蓝—红—蓝的双曲线图像,可以判断为3#空洞.通过对比分析相交翼缘曲线和空洞曲线,可以看到相交翼缘曲线顶部尖锐,两侧翼缘切线的斜率不同,而空洞曲线顶部圆润,顶部切线基本为水平线.因此,在对图像进行解释时要特别注意,不能盲目标注缺陷.
图3 为使用400 MHz 天线和900 MHz 天线的雷达扫描下所得的空洞图像及单道波形图.与600 MHz 天线扫描图清晰度的对比分析可以看出,扫描图的清晰度在不同频率下依次为,400 MHz >600 MHz >900 MHz.
2.2 双管线(Φ=160 mm)干扰下空洞探测模型
双管线(Φ=160 mm)干扰下,不同频率雷达扫描图如图4、5 所示.
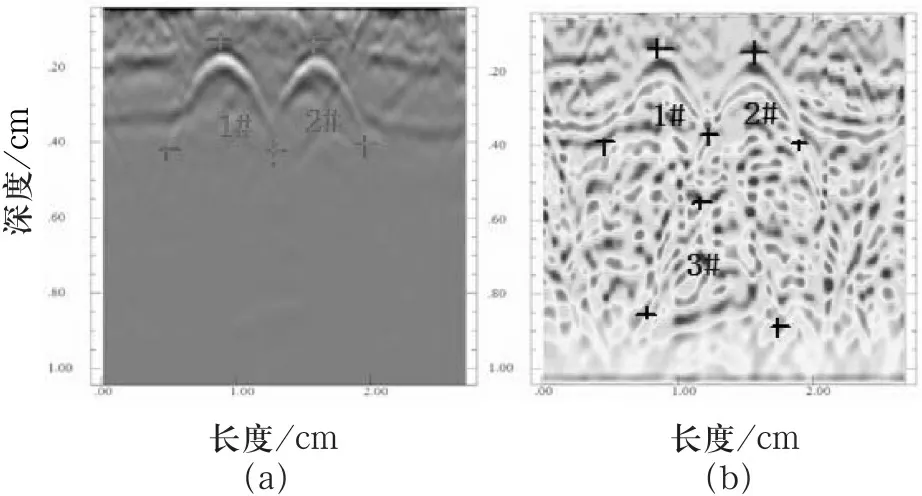
图4 双管线(Φ=160 mm)干扰下600 MHz 雷达扫描图
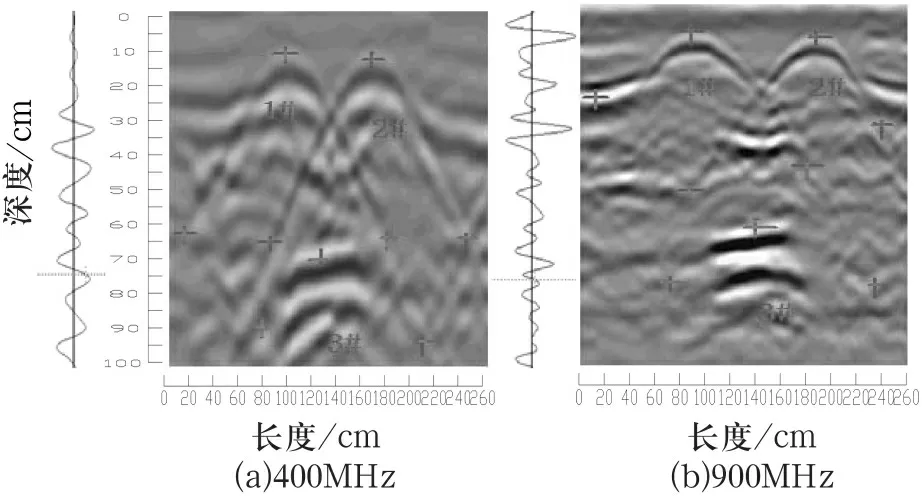
图5 双管线(Φ=160 mm)干扰下雷达扫描图
图4 为测线3 经过滤波、零线归位和增益处理后的空洞图像,1#、2#管线的反射波形依然可以清晰地看到,且2 个波形之间基本无干扰.通过纵坐标可以看出,750 mm 处出3#空洞的反射图像(双曲线形状),图像翼缘略微发生错段,但是比双管线(Φ=250 mm)干扰下的扫描图像稍微清晰一些.
图5 为使用400MHz 天线和900MHz 天线所得的空洞图像及单道波形图,与600 MHz 天线相比,400 MHz 天线探深大,可以分辨出空洞的整体波形图;900 MHz 天线只能看到3#空洞顶部的反射波形.与双管线(Φ =250 mm)干扰下的扫描图像相比,400 MHz 波形更加完整,且未发生畸变.
对以上2 种情况的综合分析可以发现,上部干扰管线的直径对下部空洞探测影响不是很大,其主要影响因素为管线间距和天线频率,当管线间距大于3 倍管线直径时,对空洞的探测影响较小.低频天线探深大,图像清晰度高.
2.3 三管线(Φ=160 mm)干扰下空洞探测模型
三管线(Φ=160 mm)干扰下,不同频率雷达扫描图如图6、7 所示.
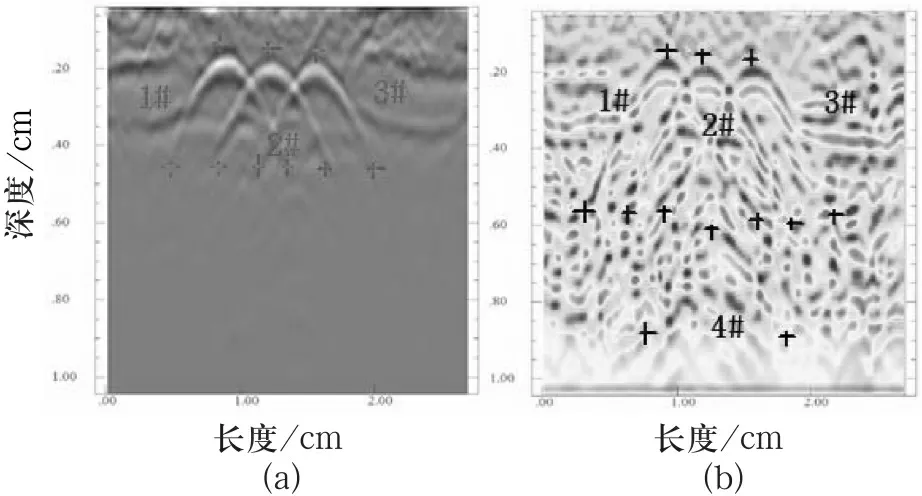
图6 三管线(Φ=160 mm)干扰下600 MHz 雷达扫描图
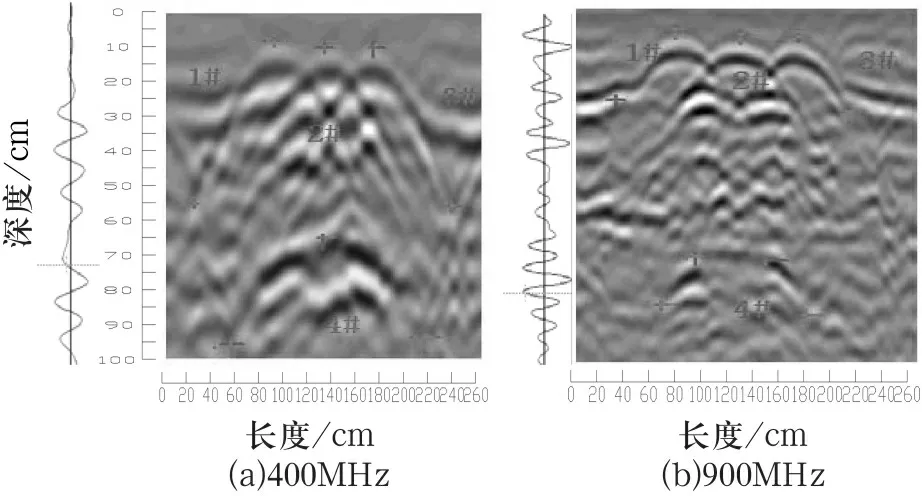
图7 三管线(Φ=160 mm)干扰下雷达扫描图
图6 为测线3 经过滤波、零线归位和增益处理后的空洞图像,可以清晰地看到,1#、2#、3#管线的反射波形图,而且波形图并未相互叠加,均为典型的双曲线形式.在图6(b)700 mm 处可以分辨出4#空洞(红—蓝—红双曲线形),图像颜色略微发生错段,但仍保持整体形式.与图2、图4 对比分析可知,当管线间距缩小时,下部空洞的探测效果受到的影响较大.
图7 为使用400 MHz 天线和900 MHz 天线所得的空洞图像及单道波形图,经过滤波处理可以看出,1#、2#、3#管线反射波振幅减小,灰度图变暗.4#空洞两侧翼缘完整,但并不完全对称,顶部出现错段,图像发生了畸变,受杂波的干扰严重.
2.4 三管线(Φ=160 mm,间距为0)干扰下空洞探测模型
三管线(Φ=160 mm,间距为0)干扰下,不同频率雷达扫描图如图8 所示.
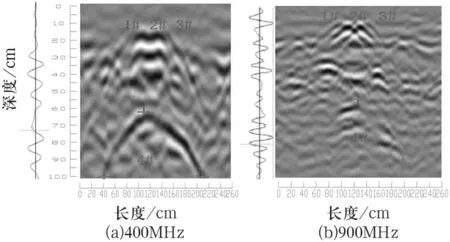
图8 三管线(Φ=160 mm,间距为0)干扰下雷达扫描图
图8 为使用400 MHz 天线和900 MHz 天线所得的空洞图像及单道波形图,经过滤波处理可以看出1#、2#、3#管线的反射波形图.在图8(a)中,4#空洞的反射图像可以清晰地分辨出来,图像为典型的双曲线形式,图像完整;在图8(b)中,4#空洞的反射图像受屏蔽干扰严重,翼缘间距减小.与厚度为315 mm 的空洞干扰相比,厚度为160 mm 的空洞对下部空洞影响较小.综合分析可知,当上部空洞厚度较小时(<160 mm),下部空洞可以清晰的探测出来,当上部空洞厚度较大时(>300 mm),下部空洞较难探测出来.
2.5 多管线干扰下空洞探测模型
多管线干扰下,不同频率雷达扫描图如图9、10所示.
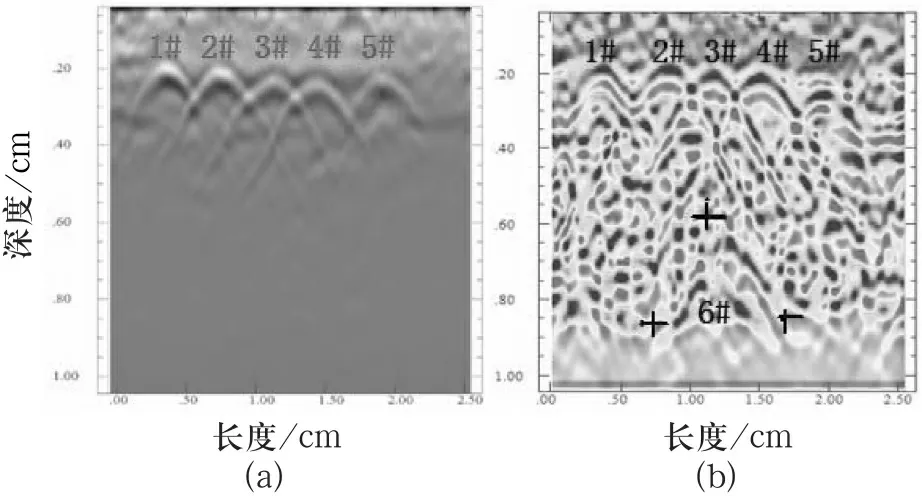
图9 多管线干扰下600 MHz 雷达扫描图
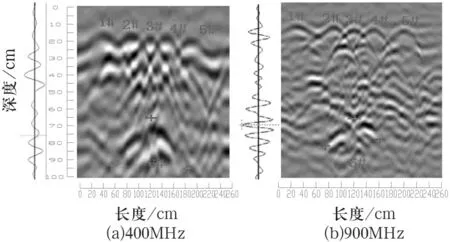
图10 多管线干扰下雷达扫描图
图9 为测线3 经过滤波、零线归位和增益处理后的空洞图像,可以清晰地看出,1#、2#、3#、4#、5#管线的反射波形图.其中1#、5#管线的反射图形顶部曲率略小,这是由于空洞缺陷变小引起的.经过增益处理后,在图9(b)中可以分辨出空洞处的异常:同向轴不连续,发生错段,呈双曲线形.与图6(b)比较,可以看出在管线外侧等间距增加管线数量时,对探测效果的影响较小,可见探测效果主要受管线间距的影响较大.
图10 为使用400 MHz 天线和900 MHz 天线所得的空洞图像及单道波形图,在图10(a)中6#空洞的两侧翼缘变短,双曲线同向轴发生多次错段,两侧不完全对称,发生轻微畸变,这是由于管线外侧增加了两根110mm 的管线所致.在图10(b)中,由于单根管线反射图像翼缘相交,而且间距较小,在图像下部形成一排杂波,杂波为双曲线形式,极易判断错误.通过单道波形图,在黑点处可以看到较强反射,说明在此处反射系数增强,存在介质差异,可以判断为空洞.与400 MHz 天线相比,高频天线在深层空洞探测时图像显示范围减小.
3 实际工程应用
3.1 工程概况
深圳某科技集团工业园始建于2000年,目前园区内道路纵横交错,人流和车流较大,地质情况复杂.本研究对该工业园区内道路可能存在的地下空洞进行了探测.为了降低维修成本,根据试验结果分析选用400 MHz 天线沿道路前进方向连续测量并在车道的中间布设一条测线,运用本研究的方法设置探地雷达的基本参数和后期数据处理.通过对测试段实际情况分析,试验获得了较好的效果.
3.2 检测结果与分析
实际检测结果如图11、12 所示.

图11 双层空洞扫描图
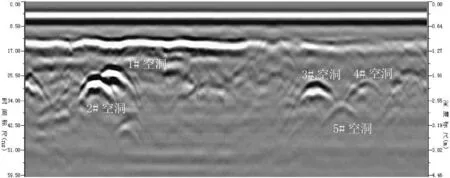
图12 空洞扫描图
从图11、12 可知,在道路埋深1.8 m 处分布1#和2#空洞,在1#、2#空洞下方分布有3#、4#空洞,上部空洞并未在下部空洞的正上方.当上部空洞间距较大时对下部空洞探测影响较小,在图像中4#空洞位于1#和2#之间,图像为典型的双曲线形,与试验结论相符.在图像左侧1#、2#空洞之间距离较小,1#空洞曲线左侧翼缘与2#空洞曲线重叠,仅保留部分特征.在图像右侧3#、4#空洞位于上部,5#空洞位于3#、4#空洞下面,受上部空洞干扰,5#空洞图像清晰度下降,但图像保持完整,为完整的双曲线形式.
4 结 论
当空洞间距大于3 倍空洞直径时,对下部空洞的探测影响较小.当空洞上部土层厚度较小时(小于160 mm),下部空洞可以清晰的探测出来;当空洞上部土层厚度较大时(大于300 mm),下部空洞较难探测出来.此外,高频天线在深层空洞探测时,其图像显示范围较窄,探深较浅.
[1]贺脱夫.探地雷达在探测路基地下空洞中的应用[J].西部探矿工程,2008,20(6):120-122.
[2]江凯.探地雷达在路基检测中的应用研究[D].成都:西南交通大学,2011.
[3]刘栋.探地雷达在公路工程检测中的应用研究[D].沈阳:东北大学,2008.
[4]柴福斌.基于探地雷达的水泥混凝土路面板底脱空检测技术[D].西安:长安大学,2009.
[5]蒋诚.地下管道周边介质缺陷的探地雷达实测研究[D].长沙:湖南大学,2014.