有人/无人机协同互操作性研究
2015-07-18赵露露
赵露露

摘 要:有人/无人机协同作战是未来一种重要的作战模式,介绍了有人/无人机协同互操作性的定义与北约发布的相关标准,总结了国内外发展现状与发展趋势,研究了有人机与无人机实现互操作性的系统结构及需要解决的关键技术。
关键词:无人机;互操作性;数据链;人机集成
中图分类号:V279 文献标识码:A 文章编号:2095-1302(2015)05-00-03
0 引 言
无人机是现代空战中获取信息优势、实施精确打击、完成情报侦察监视任务的重要工具,已经渗透到战场空间的各个领域,在作战体系中的作用日益突出。无人机在执行侦察监视、目标指示、反辐射摧毁、打击效能评估等枯燥、恶劣和危险任务时相比有人机有着得天独厚的优势[1-3]。信息化战争进行的是敌我双方之间的体系对抗,战场环境瞬息万变,电磁环境复杂恶劣,这对严重依赖通信链路,对战场变化反应能力较差的无人机系统提出了严峻的挑战。在无人机自主化程度不高的情况下,无人机与有人机协同作战,利用有人机战术决策上的灵活优势,可以极大地提高作战效能[4,5]。
互操作性是实现有人机与无人机之间互连互通、信息共享、协同控制的基础。本文对有人/无人机互操作性的相关标准进行了介绍,对国内外研究现状进行了梳理,提出基于数据链的有人/无人机协同互操作性的系统架构与要解决的关键技术,总结了未来的发展趋势。
1 互操作性
1.1 互操作性标准
无人机种类和数量的增加带来了通用性差、信息共享困难等问题,互操作性是解决这些问题的有效手段。互操作性指的是多个平台通过协同操作完成给定作战任务的能力。通过建立互操作性标准,可以实现不同无人机平台间传感器信息的共享及无人机系统间的通用化操作,对节约成本、简化操作和战术灵活控制有重要意义。
北约发布了一系列无人机系统互操作性相关的标准化协议(Standardization Agreements,STANAG),按功能可分为四类:数据标准、接口标准、通信标准和控制标准,如表1所示[6]。
该系列标准可支持无人机系统实现以下功能:对无人机的遥测遥控;对无人机机载传感器等有效载荷的控制能力;无人机情报侦察监视信息的有效描述与传输;无人机作战任务的传递与更新。
表1 STANAG无人机互操作系列标准
标准类型 标准名称
数据标准 STANAG 4545:北约二次影像格式
STANAG 4559:北约标准影像库接口
STANAG 4607:北约地面运动目标指示数据格式
STANAG 4609:北约数字式运动图像标准
STANAG 7023:北约空中侦察原始图像格式
STANAG 3809:数字地形高程数据地理信息交换标准
STAMAG 5500:北约报文格式化系统联合数据出版物-3
STANAG 7074:数字地理信息交换标准
STANAG 3377:空中侦察情报报表
STANAG 4250:北约开放系统互连标准件
STANAG 7024:空中侦察磁带录音机接口
接口标准 STANAG 4575:北约高级数据存储接口
通信标准 STANAG 7085:成像系统互操作数据链路
控制标准 STANAG 4586:北约无人机控制系统接口标准
1.2 互操作级别
1999年,北约组织由政府、军队和工业部门专家组成的专家组制定了STANAG 4586标准,该标准面向无人机的互操作性定义了无人机控制系统的标准接口,目标是实现无人机地面通用控制站的功能,2007年和2012年分别更新了该标准的第二版和第三版。
STANAG 4586标准对无人机的互操作级别(Level of Interoperability,LOI)进行了5级定义[7],见表2。可以看出,对无人机的互操作水平是一个递增的过程,2级的互操作级别只能实现无人机传感器产品信息的直接接收,到4级时,可以控制无人机的传感器,还可对无人机的飞行进行控制。
表2 无人机互操作级别
LOI 定义
1 间接接收和发送无人机传感器产品信息
2 第1级能力+直接接收无人机传感器产品信息
3 第2级能力+控制和监视无人机载荷
4 第3级能力+控制和监视无人机,较少涉及无人机地发射与回收
5 第4级能力+控制和监视无人机地发射与回收
STANAG 4586标准主要针对的是地面控制站对无人机的控制和监视,当前有人机对无人机的协同控制与互操作性的研究主要是实现把地面控制站放到有人驾驶飞机上,因此,互操作级别的等级划分也是以此标准为参考。
2 国内外发展现状
2.1 国外发展现状
有人/无人机协同(Manned and Unmanned Teaming,MUMT)的最早应用是美国空军在20世纪60年代从C-130运输机发射携带小牛(Maverick)空对地导弹的AQM-34侦查无人机。
2004年,在美国国防高级研究计划局(Defense Advanced Research Projects Agency,DARPA)和空军提出的软件使能控制计划(Software Enabled Control,SEC)的研究中,实现了有人战斗机F-15E对T-33改装的无人机的控制,实现了有人机采用语音指令控制无人机的方法[8]。无人机可以执行坐在有人机上的武器系统操作员(Weapons Systems Officer,WSO)决定的动态任务规划,对突发威胁及时反应。有人机与无人机之间通过Link-16数据链实现状态和用户自定义数据的收发。
美国陆军将“阿帕奇”攻击直升机有人/无人协同视为未来作战力量建设的关键能力[9]。机载有人/无人系统技术(Airborne Manned/Unmanned Systems Technology,AMUST)演示验证于1996年启动,目的是进行有人/无人机编队协同作战的功能需求定义和关键技术分析。1999年的AMUST-Baseline演示验证,使用AH-64D“阿帕奇”直升机和“猎人”无人机实现了无人机侦察信息在有人直升机上的显示。2000年启动的AMUST-D 6.3计划则是将重点放在指挥控制飞机、直升机和无人机之间的互连互通上。基于战术通用数据链 (Tactical Common Data Link,TCDL)实现数据直接接收、载荷直接控制以及飞行控制等相关有人/无人机协同互操作技术。
2006年的猎人远距杀手编队(Hunter Standoff Killer Team,HSKT)计划采用一架 “猎人”无人机和一架挂载海尔法反坦克导弹的AH-64D“阿帕奇”攻击直升机进行协同。AH-64D与无人机之间有通信接口系统(主要为TCDL数据链,机组人员可以了解无人机传来的情报侦察、目标指示信息。机组成员可以利用无人机的传感器识别目标,无人机通过激光照射锁定目标并引导有人机发射导弹击中目标。试验中AH-64D对“猎人”无人机的互操作级别达到了4级。
有人/无人协同当前有两套已经列装的系统[10]。有人/无人协同互操作级别2(Manned Unmanned Teaming Level of Interoperability 2,MUMT-2)系统,能够为AH-64D提供全面综合的多波段与2级互操作级别的能力,允许直升机机组人员通过TCDL数据链从其他平台接收非TCDL波段的传感器信息。无人机战术通用数据链组件(UAS Tactical Common Data Link Assembly,UTA)能够为AH-64E在传输距离超过50 km的情况下提供互操作级别3级和4级的能力。2013年在美国加利福尼亚的国家训练中心进行了AH-64E的操作性测试,AH-64E与“灰鹰”无人机的距离为100 km时通过TCDL数据链传送视频信息,借助无人机的目标指示信息,AH-64E在不离开原来区域的情况下实现对目标的精确打击。
英国QinetiQ公司考察了单座战斗机对多架无人机控制和协同的可行性,指出单座战斗机控制无人机时,若无人机的智能化水平低,自主能力差,则操作者的任务负担显著增加,无法完成对无人机的飞行控制、载荷控制等操作。当无人机具有较高的自主化水平时,可对其进行4级互操作级别的控制。2007年4月,进行了一架狂风战斗机与模拟无人机的BAC1-11编队协同飞行试验,实现有人机对4架无人机的协同控制。
美国国防部在2011年公布的《无人系统综合路线图2011~2016》[11]中对有人/无人机协同的发展情况进行了系统介绍,指出有人/无人机协同发展需要硬件和软件的互操作性、可升级的自主性、人机接口、全新的协同控制算法和网络任务工具的高度发展为支撑。有人/无人机协同互操作的发展会使当前传感器到射手的闭环向未来网络化作战系统转变。有人/无人机协同作为一个节点融入到更大的作战网络会改变作战任务的执行方式,提高作战效能。
2.2 国内发展现状
国内对于有人/无人机协同互操作的研究尚处于起步阶段,聚焦于理论分析与仿真验证。相关单位在有人/无人机协同空战模式及能力需求分析[12]、编队协同任务分配方法[13,14]、任务控制系统[15]、交互控制技术[16]、支持无人机互操作的多数据链互连网关设计[17]等方面进行了研究。
3 发展趋势
3.1 互操作级别不断提高
随着数据链技术与多平台协同控制技术的发展,有人机对无人机的监视与控制水平不断提高,已从最开始的只能通过地面控制站间接收无人机侦察情报信息向对无人机传感器飞控系统的直接操控发展,互操作级别已经达到4级或更高水平。
3.2 通用性不断增强
无人机的种类和数量仍在不断增加,需要对不同种类的无人机建立通用性强的控制体系结构与互操作性标准。STANAG 4586标准已经在实现通用地面控制站方面迈出重要一步,需要研究适用于有人/无人机协同的通用化体系架构与消息标准,实现有人机、地面控制站对无人机的无缝协同控制。
3.3 网络化能力不断提升
现代战争正在由平台中心战向网络中心战转变,随着通用数据链(Common Data Link,CDL)、Link-16等数据链在无人机上的广泛应用,无人机的网络化作战能力大大增强。无人机只有融入现有的有人机所在的网络化联合作战体系,才能获得更好的态势共享与情报信息传输分发能力。
3.4 任务需求不断更新
随着察打一体无人机、无人作战飞机的发展,无人机已不再单纯的执行侦察监视等战场辅助角色任务。未来有人/无人机协同作战时,有人机与无人机的功能定位也会发生改变,相应地,互操作级别的定义也需要做出合适的修正。
4 关键技术
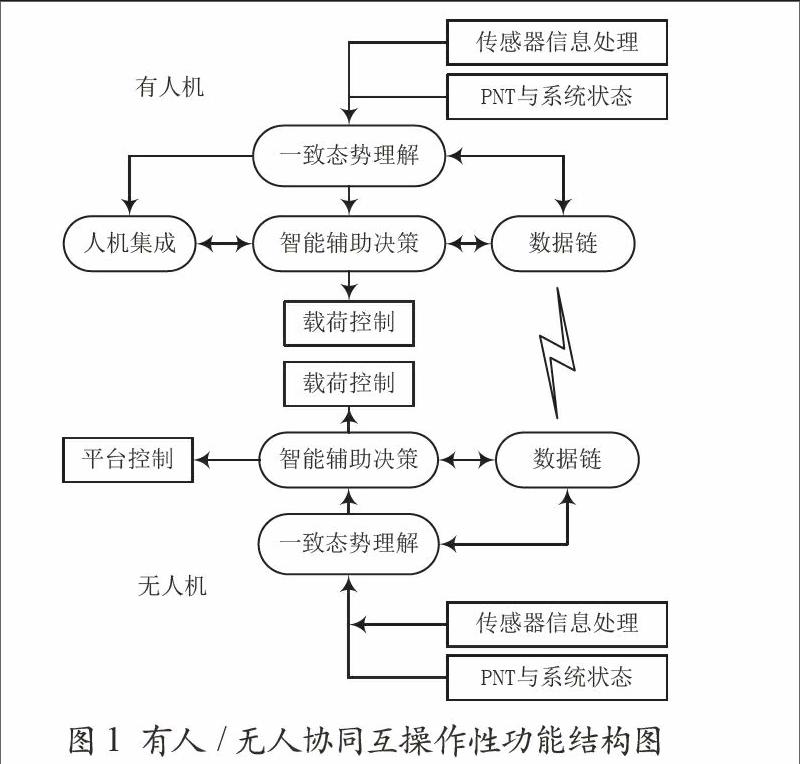
图1所示为基于数据链的有人/无人机协同互操作系统的结构框图,要实现有人/无人机的高效协同与互操作需要解决人机集成、一致态势理解、智能辅助决策等关键技术[18]。
图1 有人/无人协同互操作性功能结构图
4.1 人机集成
有人机和无人机协同编队执行任务,互操作级别较高时,有人机飞行员不仅要处理来自指挥中心的指挥控制命令,还要对无人机平台的传感器及飞行进行控制,工作负担大,需要建立一套完整、高效的任务指令集与交互控制方式,实现有人机对无人机的协同控制。
4.2 一致态势理解
综合有人机与无人机上各种传感器获取的战场情报信息与系统状态、定位导航授时(Position Navigation Timing,PNT)信息,借助数据链实现无人机与有人机战场态势的共享,生成一致的战场态势图是进行有人/无人机协同航路规划、协同任务分配的基础。
4.3 智能辅助决策
有人/无人机协同作战时,有人机对无人机战术上的指挥控制建立在无人机具备一定自主能力的基础上。智能辅助决策技术是提高无人机自主性,提高互操作级别的有效手段。
5 结 语
有人/无人机协同作战互操作性的发展受到数据链、无人机控制接口和无人机自主能力等因素的制约,当前进行的研究实现了无人机控制站位置的改变,对无人机的控制不再局限于地面控制站,操作员可在直升机或者战斗机中对无人机进行操控,同时通过战术数据链从其他作战单元获取战术信息,增强了战术的灵活性。通过传感器资源的有效整合,可以缩短传感器到射手的时间差,增强有人机的态势感知能力,提高有人/无人机编队的作战效能。
参考文献
[1] Department of Defense, USA. Unmanned Systems Integrated Roadmap FY 2013-2038 [R]. 2013.
[2] 牛轶峰,沈林成,戴斌,等. 无人作战系统发展[J]. 国防科技,2009,30(5):1-11.
[3] 陶于金,李沛峰. 无人机系统发展与关键技术综述[J]. 航空制造技术,2014(20):34-39.
[4] 肖霞. 有人机过渡到无人机的变革与挑战[J]. 电子对抗,2007(4):36-42.
[5] 王焱. 有人/无人机协同作战[J]. 电讯技术,2013,53(9):1253-1258.
[6] 曾佳,黄永葵,马滢,等. 无人机系统互操作性标准研究[J]. 航空电子技术,2011,42(2):50-54.
[7] NATO Standardization Agency. STANAG 4586 (Edition 3): Standard Interfaces of UAV Control System (UCS) for NATO UAV Interoperability[S], 2012.
[8] VALENT M, SCHOUWENAAS T, KUWATA Y, et al. Implementation of a Manned Vehicle-UAV Mission System[C]. Guidance, Navigation, and Control Conference. Rhode Island: American Institute of Aeronautics and Astronautics(AIAA), 2004.
[9] 张若晗,张策. “飞行坦克”新战术——“阿帕奇”攻击直升机的“有人/无人”组合[J]. 航空世界,2014(12):4-5.
[10] VAN RIPER C. Apache Manned Unmanned Teaming Capability[EB/OL]. (2014-8-13) [2015-03-16].http://www.ausa.org/publications/armymagazine/archive/2014/Documents/09September14/VanRiper_Sept2014.
[11] Department of Defense, USA. Unmanned Systems Integrated Roadmap FY 2011-2036 [R]. 2011.
[12] 付昭旺,寇英信,于雷,等. 有人/无人战斗机协同空战模式及能力需求分析[J]. 火力与指挥控制,2012,37(1):73-77.
[13] 刘跃峰,张安. 有人机/无人机编队协同任务分配方法[J]. 系统工程与电子技术,2010,32(3):584-588.
[14] 万路军,姚佩阳,孙鹏. 有人/无人作战智能体分布式任务分配方法[J]. 系统工程与电子技术,2013,35(2):310-316.
[15] 彭辉,相晓佳,吴立珍,等. 有人机/无人机协同任务控制系统[J]. 航空学报,2008,29(S1):135-141.
[16] 闫晔. 有人机/无人机协同中的交互控制技术研究[D]. 长沙:国防科学技术大学,2007.
[17] 张庆杰,王林,朱华勇,等. 支持无人机互操作的多数据链互连网关设计[J]. 计算机工程,2009,35(20):30-33.
[18] 马向玲,雷宇耀,孙永芹,等. 有人/无人机协同空地作战关键技术综述[J]. 电光与控制,2011,18(3):56-60.
