通道一致性对单矢量水听器MVDR方位谱估计的影响分析
2015-07-18宋婧张锴张兴隆
宋婧++张锴++张兴隆
摘 要:针对实际工程中单矢量传感器MVDR传感器通道与振速传感器通道一致性不匹配导致其性能恶化的问题,引入了一种基于单矢量水听器的MVDR方位谱估计算法,通过公式分析了该算法的方位估计性能,研究了通道一致性对方位估计结果的影响,提升了MVDR的空间谱尖锐程度。仿真结果表明:在足够的信噪比条件下,该算法可以得到目标方位的无偏估计,而通道的幅相不一致性不仅使方位谱的波束宽度变大,还会使方位估计产生偏差以及伪峰。最后给出了湖试数据的处理结果,增加了数据分析的可信度。
关键词:矢量水听器;MVDR;通道一致性;湖试数据
中图分类号:TB566 文献标识码:A 文章编号:2095-1302(2015)05-00-02
0 引 言
Capon于1969年提出了最小方差无畸变响应 (MVDR)方位估计器,该方位估计器可以视作一个尖锐的空间带通滤波器[1],Hawkes等人研制出了基于MVDR的波束形成器,且利用最佳性能界对矢量波达方向(DOA)估计性能进行了检测,证明水听器代替声压传感器后能带来估计性能的改善[2]。KT.Wong等人对远离边界单个矢量水听器的MVDR波束成形问题进行了分析,且深入分析了矢量水听器的配置结构[3]。本文结合实际工程环境的复杂性,在不同信噪比下分析了该算法方位估计的性能,研究了接收数据存在相位和灵敏度不一致的几种情况,并仿真了其可能给方位估计带来的影响,最后通过湖试数据的处理结果验证了仿真分析得到的结论。
1 单矢量水听器的MVDR方位谱估计
矢量水听器由声压传感器和质点振速传感器两部分构成,可以共点、同时收取声场的声压与振速信息[4]。为了推理需要,本文仅考虑矢量水听器输出声压P和正交的二维振速Vx,Vy,推导出测量方程如(1)式所示:
(1)
其中: x(t)表示水听器接收声压波形,θ表示入射声波水平方位角,θ的取值范围为-π≤θ<π,ρc表示波阻抗。为分析问题方便,令ρc=1。假设已知目标信号水平入射角为θd,信号入射到矢量水听器上,对三路数据采样后可产生一个3×1的矢量水听器阵列流形A(θd),从而得到接收数据的表达式,如式(2)所示:
X(t)=A(θd)x(t)+N(t) (2)
其中:N(t)表示噪声矢量, A(θd)的表达式为:
(3)
式(3)中的第一个和第二个分量分别表示矢量水听器两个不同振速通道的输出,最后一个分量表示矢量水听器声压通道的输出,由此推导出,基于单矢量水听器的MVDR方位谱输出表达式,如式(4)所示:
(4)
其中:协方差R=E[XH],a(θ)表示θ的导向矢量,其形式类似单矢量水听器的阵列流型。到此,我们已经将阵列处理中的“声场方位谱” [5]的概念引入到了单矢量水听器的信号处理中。和传统的MVDR方位谱估计算法一样,本方法也需要在方向轴上进行全域搜索。
2 仿真分析
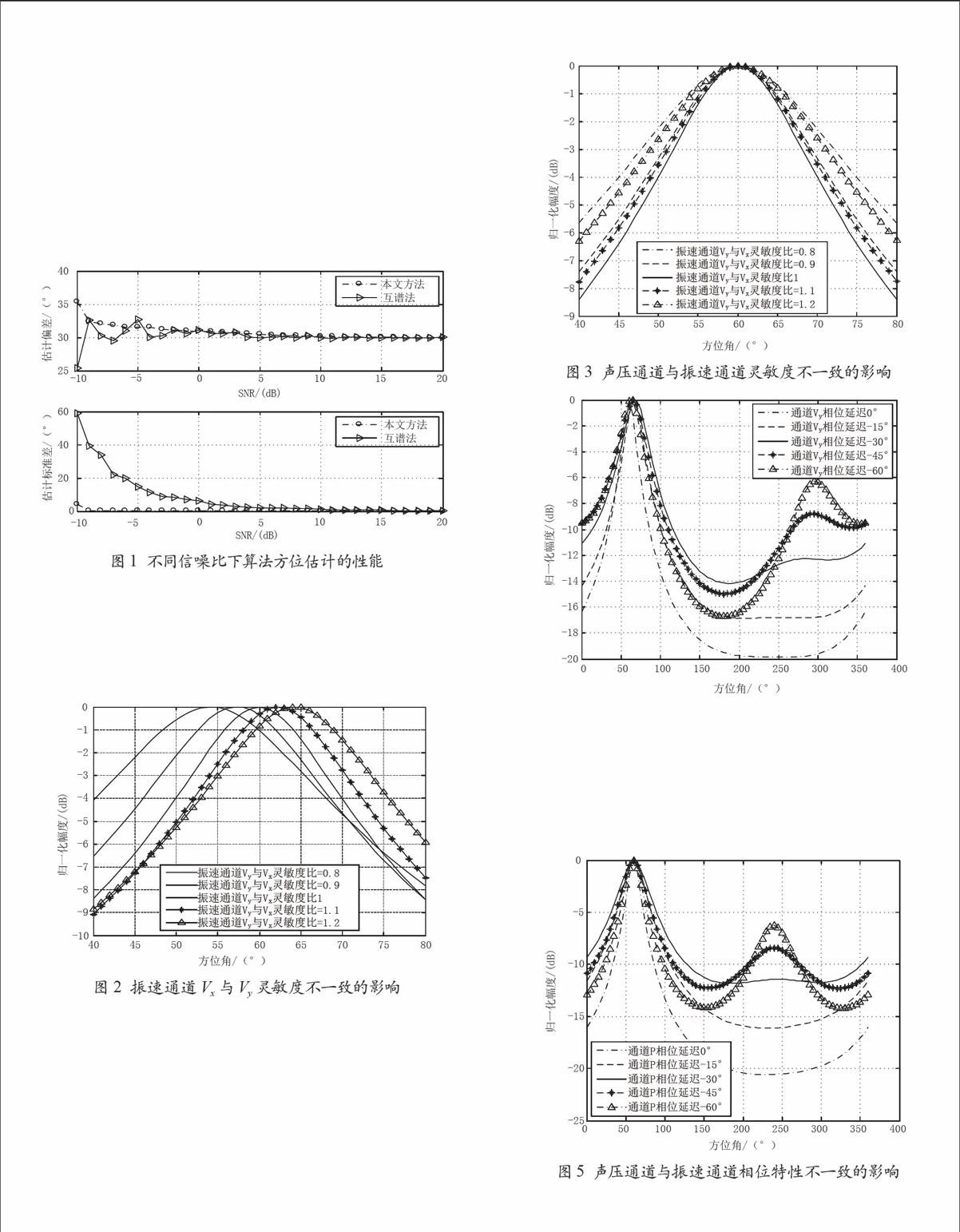
仿真中噪声为带宽1 kHz的零均值高斯噪声,信号参数为θ=30°,带宽1 kHz的零均值高斯噪声,采样频率4 kHz,样本点数1 000,搜索步长Δθ=0.1°,计算结果为100次独立实验的统计数据。
注意到,在低信噪比情况下,互谱法的方位估计在真实值附近上下波动,而本文方法的方位估计是有偏的。这是因为:信号方向决定于接收数据矩阵协方差矩阵R的对角线上能量之比,由于各个通道接收的噪声功率相同,随着信噪比的降低,对角线上噪声所占的比重逐渐增加而使对角线上能量趋于相等,所以方位估计结果有接近45°的趋势。
观察还发现,随着信噪比的降低,互谱法方位估计精度出现下降,而本文算法标准差仍然很小,这是低信噪比下两种算法估计方位分布趋势不同的结果。需要指出,本文方法的估计方位估计标准差还与搜索步长有关。
在实际工程应用中,综合考虑声压和振速信道不同、水听器元件灵敏度的差异、硬件电路的增益不同,以及近场条件下波阻抗的影响,水听器三个接收通道的数据在幅相特性上难以严格一致,为此通过仿真进一步分析其影响。仿真条件大致同上,θ=60°,信噪比为20 dB。
图1 不同信噪比下算法方位估计的性能
如图2所示,在相同的仿真环境下,振速通道灵敏度比值不同会对方位的估计造成影响。2个振速通道比值的差异增加方位谱波束的宽度。灵敏度的差异越大,方位估计的偏差越大,波束宽度也越宽。
图2 振速通道Vx与Vy灵敏度不一致的影响
如图3所示,声压通道与振速通道灵敏度比值不同会对方位的估计带来影响。声压通道和振速通道之间灵敏度差异越大,波束宽度就越宽,但由于导向矢量a(θ)的第三项中不含有方位因子,故方位估计结果不产生偏差。
如图4所示,振速通道之间的相位特性不一致给方位估计带来影响。振速通道间存在相移时,方位估计结果会略有偏差,且偏差与相移的大小和正负有关。特别指出,由于振速通道Vy相对于其它两个通道存在相移,所以方位估计时会产生一个伪峰,其位置与真实方位关于象限X轴对称。同理,当振速Vx通道存在相对相移时,会得到与真实方位关于象限Y轴对称的伪峰。
图3 声压通道与振速通道灵敏度不一致的影响
图4 振速通道Vx与Vy相位特性不一致的影响
如图5所示,声压通道与振速通道之间的相位特性不一致给方位估计带来影响。仿真结果表明声压通道和振速通道之间的相移对方位估计的影响与振速通道间的存在相移带来的影响是类似的,只是产生的伪峰与真实方位关于象限原点对称。
图5 声压通道与振速通道相位特性不一致的影响
3 湖试数据
2013年9月在吉林松花湖进行了该算法的湖试试验,目标信号为500~5 500 Hz的高斯噪声,采样频率16 kHz,信号发射时接收信噪比很高,可近似看作纯目标信号,不发射时采集的数据为纯干扰数据。图6显示出了某一段数据处理得到的方位谱曲线。
图6 处理湖试数据得到的方位谱
观察发现,方位谱中真实方位关于象限原点对称的位置附近有一个伪峰,显然这是声压与振速通道存在相移的缘故。需要指出,由于湖试试验平台中的硬件功放电路产生的相移以及水听器自身敏感元件引起的相移都已经调校到几度之内,因此可以断定相移主要是声压和振速信道函数之间的差异所引起的非恒定相移。鉴于相移的产生机理,仅给出经过灵敏度补偿后的方位谱,可以看出,经灵敏度补偿后,在保证方位估计精度的前提下,方位谱的波束宽度变窄了,与仿真结果吻合。
4 结 语
本文介绍了一种基于单矢量水听器的MVDR方位谱估计算法,主要研究了通道一致性对该算法的影响,考虑了振速通道之间以及声压与振速通道间的灵敏度差异和相移等因素对方位估计性能的影响,得到了一些有意义的结果。分析的结果经过了处理湖试数据的验证,对于工程实践具有指导意义。
参考文献
[1]张贤达.现代信号处理[M].北京:清华大学出版社,2002.
[2] Hawkes M ,Nehorai A. Acoustic Vector-sensor beamforming and Capon direction estimation[J]. IEEE Trans. on Signal Processing, 1998, 46(9): 2291-2304.
[3] Wong K T ,Hoiming Chi. Beam patterns of an underwater acoustic vector hydrophone located away from any reflecting boundary [J].IEEE J of Oceanic Engineering, 2002, 27(3):628-637.
[4]梁国龙,张锴,范展,等.单矢量传感器MUSIC算法的DOA估计及性能评价[J].哈尔滨工程大学学报,2012,33(1):30-36.
[5]何希盈,程锦房,邓大新,等.单矢量水听器的MVDR波束形成性能研究[J].兵工自动化,2009,28(11):59-61.
