基于机载激光雷达的城市空间信息提取的研究*
2015-06-30许捍卫
李 勇,许捍卫
(河海大学地球科学与工程学院,江苏 南京 210098)
1 引 言
城市区域地理空间要素的自动提取一直以来是摄影测量与遥感、计算机视觉领域的研究重点[1]。随着经济的快速发展,城市空间布局与结构日新月异的变化,人们对地理空间信息的需求越来越迫切。采用传统野外测量和近景摄影测量的方法虽然在获取数据方面精度高,但需要大量人工劳动,成本高、效率低。而使用高分辨率的遥感影像和数字摄影测量技术能快速获取大范围的地理数据,且相应的软件和数字立体摄影测量工作站已在生产部门得到广泛普及和应用,但通过多影像同名点匹配获得三维坐标需要大量的交互式操作,不仅提高了成本,还容易受到环境、光照、天气、遮挡、阴影、对比度等影响。
机载激光雷达(Light Detection And Ranging,LIDAR)是将高速激光测距、高精度动态载体姿态测量和高精度动态GPS差分定位技术集成在一起的主动式对地观测技术。通过LIDAR能够直接获取飞行器下方大范围区域表面密集的三维点云数据,具有自动化程度高、受天气影响小、数据生产周期短、精度高、密度高、无需大量地面控制工作等特点,因此成为快速获取高时空分辨率三维空间信息的重要数据源。
LIDAR技术目前广泛用于城市规划、通信设计、交通导航、灾害管理、环境监控等领域。LIDAR数据是没有语义信息的、高精度、密集的大数据量点云,需要高效的处理方法从中获取空间要素信息。虽然目前国内外开展了大量相关研究工作,并取得了显著进步,但是相对于日益成熟的硬件系统,LIDAR数据的有效处理依然存在巨大挑战,缺少令人满意的、成熟、完善的处理方法和流程。下面从地形、建筑物和道路的提取这三个方面分析目前基于机载激光雷达的城市空间信息提取技术。
2 地形信息提取
LIDAR技术的一个主要目的就是获取地形信息、制作地形图、构建数字高程模型。因此需要从点云中提取地面点,非地面点则被视为噪声要加以去除,该处理过程被称为点云滤波[2],是LIDAR数据处理中研究的最早也是最多的课题之一。因为地形的多样性和地物的复杂性,自动点云滤波处理一直以来都是研究难点,尤其是在地形变化剧烈的大范围区域。
目前已提出了大量不同方法进行点云滤波。基于坡度的方法根据地面与地物之间的坡度比较显著的特点计算邻域点的坡度,并根据预定义阈值进行滤波。方向扫描方法沿着扫描线方向检测高程变化,从而判断是其否为地面点。表面插值和不规则三角网加密方法通过设定角度和距离约束来逐步逼 近 真 实 地 面[3-5]。Mongus和 Žalik[6]通 过多层次插值方法自顶向下由粗糙表面逐步插值逼近真实表面,相关阈值根据点到表面距离的标准差进行定义。形态学方法使用形态学运算,如开运算,分离地面点和地物点[7,8]。该方法具有概念简单、易于实现的优点,许多研究都表明这类方法能有效滤除地物点[8]。如它能通过计算原始高程和形态学开运算后高程的差值并与预定义阈值进行比较,从而逐渐增大窗口尺寸渐进式滤除非地面点。Chen等[8]在形态学滤波器中进一步考虑坡度的变化。Li等[9]根据高程显著变化的特征点重新定义形态学开运算。因为地物最有可能出现在这些特征点周围,因此形态学腐蚀和膨胀运算仅仅对特征点周围的点进行运算。这样可以降低误删除地面点的可能性,再使用区域生长方法恢复与地面相连的点。虽然现有研究已取得较大进步,但是对于复杂的城市区域、陡峭的地形起伏区域等困难情况,依然难以确保滤波结果的准确性和可靠性[6,10]。如图1所示,一些低矮的地物与起伏的地面难以完全区分。
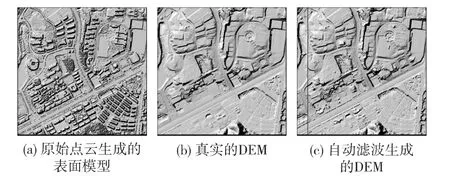
图1 一种形态学滤波方法的结果
3 建筑物信息提取
建筑物与人类的生产、生活密切相关,其空间信息的获取与分析处理一直以来都是研究重点[12,13]。相对于影像复杂的光谱和纹理信息,LIDAR点云所包含的高程信息更适合于提取建筑物,如图2所示。因此从LIDAR数据中检测建筑物、提取其特征、构建三维建筑物模型成为研究热点。但受现实中复杂多变建筑物形状、周围环境噪声的影响,建筑物的自动提取一直是研究难点。

图2 城市区域的航空影像和对应的三维点云
基于LIDAR点云提取建筑物的方法通常可以分为三类[14]。第一类方法是根据原始LIDAR点云生成初始轮廓或格网,然后进行简化、综合。Zhang等[15]基于区域生长算法连接建筑物边界点形成粗糙的轮廓,并使用道格拉斯-普克算法去除如锯齿状的形变噪声。然后计算每栋建筑物轮廓的主导方向,并根据主导方向调整初始边缘。Sampath和Shan[16]使用改进的凸壳算法跟踪连接建筑物边界点形成初始轮廓,再使用正交约束对初始轮廓进行规则化。Lach和Kerekes[17]先找到位于建筑物外围轮廓处的点,然后用袖子拟合方法(sleeve-fitting approach)连接选取的点形成轮廓,并进行规则化。沈蔚等[18]使用Alpha Shapes算法提取建筑物点集的轮廓线,用管子算法进行简化,再施加垂直约束对轮廓进行规则化。曾齐红等[19]首先构建建筑物点的TIN模型得到三角网的边界线,将边界斜率变化显著的点作为拐点。利用所有的屋顶点将拐点扩展,得到边界的扩展点,由扩展点构成屋顶轮廓。Sun和Salvaggio[20]基于平滑约束和曲率一致性检测屋顶的显著特征,并对屋顶轮廓点用直线拟合得到轮廓线,再结合2.5维对偶轮廓法(Dual Contouring)生成建筑物表面。这类方法在几何上接近原始数据,能够表达不同形状的建筑物。然而简化、综合的过程没有考虑整体结构形状,容易受到点云缺失、噪声等影响,导致屋顶不完整和变形,影响最终结果的准确性。
第二类方法是先提取一些空间特征,如顶点、线段、屋顶面片等,然后将这些特征点、线或面进行组合形成完整的建筑物。Chen等[21]使用Canny边缘检测算子从点云深度图像中的每个建筑物区域检测初始边缘。然后将初始边缘投影到像平面形成缓冲区,并在缓冲区中使用霍夫变换检测直线。通过直线的像平面坐标和LIDAR数据中获取高程,并获取相应的三维直线。最后基于分裂-合并的方法将这些三维直线组合起来形成建筑物轮廓。Madhavan等[22]将Sobel边缘检测算子与阈值分割结合起来从LIDAR扫描图像中提取高程跳变边缘和边界线。提取出来的二值化边缘被细化为单像素宽,使用霍夫变换从其中提取出直线段,通过计算这些直线段的之间的交点将这些直线段连接起来形成建筑物轮廓。Sohn和 Dowman[23]基于IKONOS影像与LIDAR数据融合提取建筑物轮廓周围的直线。然后使用这些提取出来的直线基于二叉树(Binary Space Partitioning,BSP)多层次划分建筑物区域得到一些凸多边形。最后合并这些凸多边形形成完整的建筑物轮廓。Elaksher[24]使用霍夫变换找出每栋建筑物的所有边界线,并计算非平行边界线的交点。每3个~6个交点组成一个多边形,这些多边形组合起来形成建筑物轮廓。Jaw和Cheng[25]通过计算提取出来的三维特征线的交点组合构建屋顶的拓扑关系,形成建筑物轮廓。Rottensteiner[26]通过组合屋顶面片计算出交线或阶跃线,从而形成建筑物轮廓。然后通过将这些轮廓线与数字影像中提取的边缘匹配提高建筑物轮廓的精度。Peternell和Steiner[27]通过从点云和地面规划图中获取的相邻屋顶面片和墙面的相交获取建筑物轮廓。这类建筑物提取方法受特征组合处理制约。特征组合的过程要遵循一些规则,这些规则是影响此类方法可行性与适应性的关键。
第三类方法是定义常见的建筑物形状的参数模型,然后将待处理的建筑物点云与这些模型进行拟合,并调整模型参数以找到最合适的建筑物模型。所采用的模型基元通常具有规则的形状或是一些预先设计好的模型集合。Vosselman等[28]通过人工交互式的方法,采用平顶、人字形顶、斜顶等屋顶模型基元去拟合LIDAR数据。Jinhui等[29]使用基于模型基元的方法通过人工交互提取具有曲面的建筑物轮廓。他设计了大量的模型基元用来表现建筑物轮廓形状,这些模型基元分为线性和非线性两种。线性基元包括平面、立方体、楔形等,非线性基元包括二次和更高次的曲线。这些基元用一些函数表示,通过人工交互选取的控制点进行拟合。Henn等[22]使用支持向量机判断屋顶类型以确定最可能的模型。余烨等[30]根据屋顶面片法与向量之间的关系进行屋顶类型的识别和模型匹配。Huang等[31]采用一个基于马尔科夫链蒙特卡罗理论的统计方法选择合适的建筑物模型基元。Lafarge等[32]基于贝叶斯决策理论寻找参数模型的最优配置。这类方法严重依赖预先定义的模型基元,现实环境中复杂多变的建筑物形状给模型库的构建带来了巨大挑战。
4 道路信息提取
作为城市区域的主要空间要素之一,道路信息在城市规划、交通导航和灾害管理等领域发挥重要作用[33,34]。由于道路的复杂变化和周围环境的影响,精确有效地提取道路是一个具有挑战性的任务。基于遥感数据的道路提取通常是要获取道路中心线或者道路所在的区域[71],在低分辨率数据中道路表示为线状网络,而在高分辨率数据中道路表示为二维区域。道路提取的任务通常分为两个步骤:道路检测和矢量化。道路检测是区分道路与其他地物,而矢量化是在区分出的道路中提取中心线、平行道路线或详细的道路多边形区域。
目前已提出许多不同的从LIDAR数据中提取道路的方法。Boyko和Funkhouser[35]使用一个基于地图的方法,即将已有的二维道路网地图投影到点云上。根据二维地图预测高程不连续的道路边沿位置使用活动轮廓模型去拟合高程不连续的位置。在活动轮廓内的点都被标记为道路点。Zhu和Mordohai[33]假设道路为矩形,根据边缘和区域特征进行分割,将道路提取问题转变为最小包含问题。Choi等[36]根据样本道路的回波强度信息对道路点进行判断。Clode等[35]使用一个多层次分类的方法将点云逐步分为道路点和非道路点,并结合回波强度、高程和局部点密度进行分析。局部点密度用来判断有多少与待处理点相邻的点拥有相近的光谱和几何特征。分类得到的道路区域使用一个相位编码圆盘(Phase Coded Disk)算法进行矢量化,分别得到道路中心线、宽度和方向。Zhao和You[37]设计了一套具有可变宽度和方向的延长结构模板去拟合局部强度分布,并使用一个区域投票方法进行精化。但是该方法不能提取曲线道路。由于通常是从点云滤波得到的地面点中进行分类提取道路,而其他地面类别(如草地和裸露地面)与道路具有相近高程,因此回波强度被用来区分道路和其他地面类别。然而,回波强度受多方面因素的影响,如地面反射率、激光传播功率、大气衰减、入射角和扫描距离等。由于缺少(合适的回波强度校正方法,难以根据回波强度直接对地面点进行分类。因此,现有方法主要依据道路回波强度的同质性和连续性特征进行分割和聚类。此外,还存在遮挡引起数据缺失(如树木和车辆)、噪声(如路面标记和污染),不同道路材质(如沥青和水泥)等问题,如图3所示。
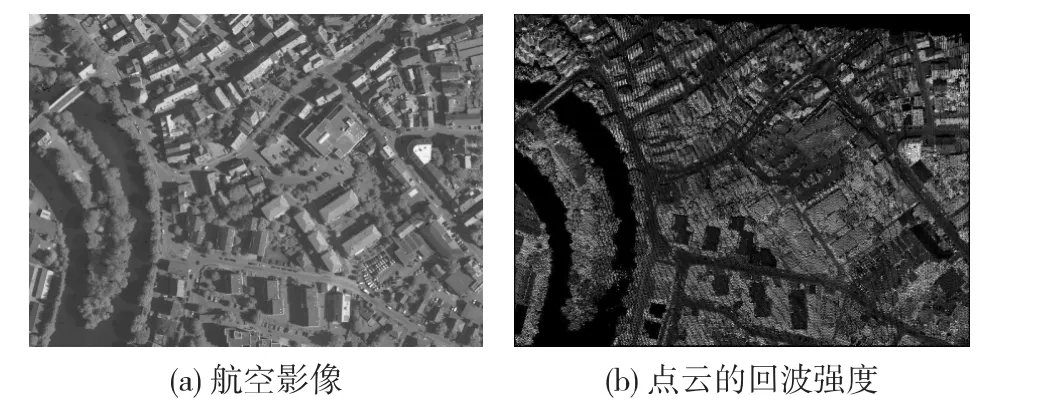
图3 城市区域的点云回波强度分布
5 结 论
LIDAR技术为快速获取高精度、高密度的三维空间数据提供了有力的支持,但是高效、自动的空间要素信息提取依然存在大量问题有待解决。如何有效区分地面的起伏特征与复杂的地物是点云滤波处理的难点。点云分布不均、屋顶材料对激光的吸收、地物的遮挡、细小的屋顶结构等情况经常出现,从而影响了基于数据的建筑物提取方法的精度和可靠性,而大范围城市区域建筑物形状结构复杂多变又给基于预定义模型库的建筑物提取方法的普适性带来了极大挑战。道路数据缺失、噪声干扰、具有相似回波强度的地面类别(如停车场)都极大影响着最终道路提取的准确性。
若仅使用单一点云数据,结合点云高程信息与影像光谱信息的处理分析有望获得更好结果,因此被许多学者认为是一个很有前途的研究方向。但是如何融合这两种具有互补性的数据源,抑制噪声干扰,自适应提取复杂的地理空间要素,目前都是亟待解决的问题。
[1] ROTTENSTEINER F,SOHN G,GERKE M,et al.Results of the ISPRS benchmark on urban object detection and 3Dbuilding reconstruction [J].ISPRS Journal of Photogrammetry and Remote Sensing,2014,93(0):256-271.
[2] SITHOLE G,VOSSELMAN G.Experimental comparison of filter algorithms for bare-Earth extraction from airborne laser scanning point clouds[J].ISPRS Journal of Photogrammetry and Remote Sensing,2004,59(1):85-101.
[3] LEE H S,YOUNAN N H.DTM extraction of lidar returns via adaptive processing [J].IEEE Transactions on Geoscience and Remote Sensing,2003,41(9):2063-2069.
[4] PFEIFER N,STADLER P,BRIESE C.Derivation of digital terrain models in the SCOP environment[C].OEEPE workshop on airborne laser scanning and interferometric SAR for detailed digital elevation models,2001,3612.
[5] CHEN C,LI Y,LI W,et al.A multiresolution hierarchical classification algorithm for filtering airborne LiDAR data[J].ISPRS Journal of Photogrammetry and Remote Sensing,2013,82(0):1-9.
[6] MONGUS D,ŽALIK B.Parameter-free ground filtering of LiDAR data for automatic DTM generation[J].ISPRS Journal of Photogrammetry and Remote Sensing,2012,67(0):1-12.
[7] PETZOLD B,REISS P,ST SSEL W.Laser scanning—surveying and mapping agencies are using a new technique for the derivation of digital terrain models[J].ISPRS Journal of Photogrammetry and Remote Sensing,1999,54(2):95-104.
[8] CHEN Q,GONG P,BALDOCCHI D,et al.Filtering airborne laser scanning data with morphological methods[J].Photogrammetric Engineering and Remote Sensing,2007,73(2):175-185.
[9] LI Y,WU H,XU H,et al.A gradient-constrained morphological filtering algorithm for airborne LiDAR[J].Optics and Laser Technology,2013,54:288-296.
[10] PINGEL T J,CLARKE K C,MCBRIDE W A.An improved simple morphological filter for the terrain classification of airborne LIDAR data [J].ISPRS Journal of Photogrammetry and Remote Sensing,2013,77(0):21-30.
[11] LI Y,YONG B,WU H,et al.An improved top-hat filter with sloped brim for extracting ground points from airborne lidar point clouds [J].Remote Sensing,2014,6(12):12885-12908.
[12] HENN A,GR GER G,STROH V,et al.Model driven reconstruction of roofs from sparse LIDAR point clouds[J].ISPRS Journal of Photogrammetry and Remote Sensing,2013,76(0):17-29.
[13] 王植,李慧盈,吴立新,等.基于RANSAC模型的机载LiDAR数据中建筑轮廓提取算法 [J].东北大学学报(自然科学版),2012,33(2):271-275.
[14] LI Y,WU H,AN R,et al.An improved building boundary extraction algorithm based on fusion of optical imagery and LIDAR data[J].Optik,2013,124(22):5357-5362.
[15] ZHANG K,YAN J,CHEN S-C.Automatic Construction of Building Footprints From Airborne LIDAR Data[J].IEEE Transactions on Geoscience and Remote Sensing,2006,44(9):2523-2533.
[16] SAMPATH A,SHAN J.Building boundary tracing and regularization from airborne lidar point clouds[J].Photogrammetric Engineering and Remote Sensing,2007,73(7):805-812.
[17] LACH S R,KEREKES J P.Robust Extraction of Exterior Building Boundaries from Topographic Lidar Data[C].IEEE International Geoscience and Remote Sensing Symposium,IGARSS,2008,2:85-88.
[18] 沈蔚,李京,陈云浩,等.基于LIDAR数据的建筑轮廓线提取及规则化算法研究 [J].遥感学报,2008,12(5):692-698.
[19] 曾齐红,毛建华,李先华,等.建筑物LiDAR点云的屋顶边界提取 [J].武汉大学学报:信息科学版,2009,34(4):383-386.
[20] SUN S,SALVAGGIO C.Aerial 3Dbuilding detection and modeling from airborne LiDAR point clouds[J].IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing,2013,6(3):1440-1449.
[21] CHEN L,TEO T,SHAO Y,et al.Fusion of LIDAR data and optical imagery for building modeling[J].International Archives of Photogrammetry,Remote Sensing and Spatial Information Sciences,2004,35(Part B4):732-737.
[22] MADHAVAN B B,WANG C,TANAHASHI H,et al.A computer vision based approach for 3Dbuilding modelling of airborne laser scanner DSM data [J].Computers,Environment and Urban Systems,2006,30(1):54-77.
[23] SOHN G,DOWMAN I.Data fusion of high-resolution satellite imagery and LiDAR data for automatic building extraction [J].ISPRS Journal of Photogrammetry and Remote Sensing,2007,62(1):43-63.
[24] ELAKSHER A F.Fusion of hyperspectral images and lidar-based dems for coastal mapping[J].Optics and Lasers in Engineering,2008,46(7):493-498.
[25] JAW J J,CHENG C C.Building roof reconstruction by fusion laser range data and aerial images[J].International Archives of Photogrammetry,Remote Sensing and Spatial Information Sciences,2008,37(Part B3b):707-712.
[26] ROTTENSTEINER F.Automatic generation of high-quality building models from lidar data [J].IEEE Computer Graphics and Applications,2003,23(6):42-50.
[27] PETERNELL M,STEINER T.Reconstruction of piecewise planar objects from point clouds[J].Computer-Aided Design,2004,36(4):333-342.
[28] VOSSELMAN G,KESSELS P,GORTE B.The utilisation of airborne laser scanning for mapping[J].International Journal of Applied Earth Observation and Geoinformation,2005,6(3-4):177-186.
[29] JINHUI H,SUYA Y,NEUMANN U.Integrating LiDAR,Aerial Image and Ground Images for Complete Urban Building Modeling[C].the Third International Symposium on 3DData Processing,Visualization,and Transmission,2006:184-191.
[30] 余烨,刘晓平,韩江洪,等.从稀疏LiDAR数据中重建居民区建筑物 [J].中国图象图形学报,2011,16(9):1681-1688.
[31] HUANG H,BRENNER C,SESTER M.A generative statistical approach to automatic 3Dbuilding roof reconstruction from laser scanning data [J].ISPRS Journal of Photogrammetry and Remote Sensing,2013,79(0):29-43.
[32] LAFARGE F,DESCOMBES X,ZERUBIA J,et al.Structural approach for building reconstruction from a single DSM [J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2010,32(1):135-147.
[33] ZHU Q,MORDOHAI P.A minimum cover approach for extracting the road network from airborne LIDAR data [C].12th International Conference on Computer Vision Workshops,2009:1582-1589.
[34] BOYKO A,FUNKHOUSER T.Extracting roads from dense point clouds in large scale urban environment[J].ISPRS Journal of Photogrammetry and Remote Sensing,2011,66(6,Supplement):S2-S12.
[35] CLODE S,ROTTENSTEINER F,KOOTSOOKOS P,et al.Detection and Vectorization of Roads from Lidar Data [J].Photogrammetric Engineering and Remote Sensing,2007,73(5):517-535.
[36] CHOI Y W,JANG Y W,LEE H J,et al.Three-dimensional LiDAR data classifying to extract road point in urban area[J].IEEE Geoscience and Remote Sensing Letters,2008,5(4):725-729.
[37] ZHAO J,YOU S.Road network extraction from airborne LiDAR data using scene context[C].Computer Vision and Pattern Recognition Workshops(CVPRW),2012IEEE Computer Society Conference on,2012:9-16.
