相对地理系旋转的调制方案设计原则研究
2015-06-21孟祥晔王秋滢
孟祥晔,王秋滢
(1.中国空空导弹研究院,河南洛阳 471009;2.哈尔滨工程大学,哈尔滨 150001)
相对地理系旋转的调制方案设计原则研究
孟祥晔1,王秋滢2
(1.中国空空导弹研究院,河南洛阳 471009;2.哈尔滨工程大学,哈尔滨 150001)
旋转方案是调制型捷联惯导系统的核心组成部分,如何制定旋转方案也是系统导航前的必要工作之一。本文在详细分析惯性组件各误差项在绕不同轴旋转、在不同停位位置对系统导航影响形式的基础上,提出了相对地理系旋转的调制方案设计原则,并设计了单轴正反转停方案。最后利用仿真加以验证,结果表明,该旋转方案能够有效地抑制惯导系统定位误差。
捷联惯导;旋转调制方案;惯性组件;设计原则
0 引 言
捷联惯导系统是一种信息量全、自主的导航系统[1],因此得到广泛的应用。但受其原理限制,其导航误差随时间积累[1-6]。旋转调制作为一项误差抑制技术,将IMU安装在旋转机构上,该机构带动IMU进行周期性翻滚、旋转和停位运动,抵消器件误差对系统各导航误差(特别是定位误差)的影响,提高导航精度[7-11]。旋转调制方案设计的目的是通过控制IMU按照一定规律进行翻滚、转动,使其器件误差沿导航系投影在一个调制周期内累计为零,抵消其对各导航误差的影响[12-15]。
调制型捷联惯导系统一般应用于高精度、长航时的运载体,这类惯导多采用地理坐标系作为导航坐标系(极区导航除外)。文献[7],[9-10]的研究表明,由于导航算法是在导航坐标系下进行的,只有在该坐标系下使惯性器件误差相互抵消才能减小惯导误差,只有在导航坐标系下设计旋转方案,才有可能最大限度地抵消捷联惯导系统误差。因此,相对地理系旋转的调制技术是目前应用较广泛的调制技术。
本文在建立IMU输出误差模型的基础上,推导了转动和停位过程中器件常值偏差、刻度因数误差、安装误差沿导航系的投影规律,提出相对地理系的旋转调制原则,依据该原则可设计各种不同的旋转方案。
1 惯性组件输出误差模型[4]
1.1 陀螺仪输出误差模型
光纤陀螺仪是用来测量其敏感轴相对惯性系旋转角速度的一种测量元件,其误差源主要包括陀螺常值漂移、刻度因数误差和安装误差。输出误差模型为
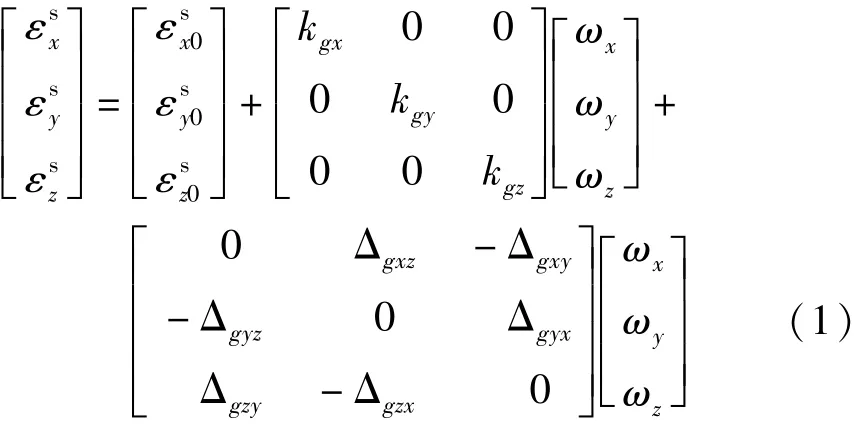
1.2 加速度计输出误差模型
加速度计是用来测量载体相对惯性空间运动加速度的一类测量元件,其误差源主要包括加速度计零位偏置、加速度计刻度因数误差和加速度计安装误差。误差模型为
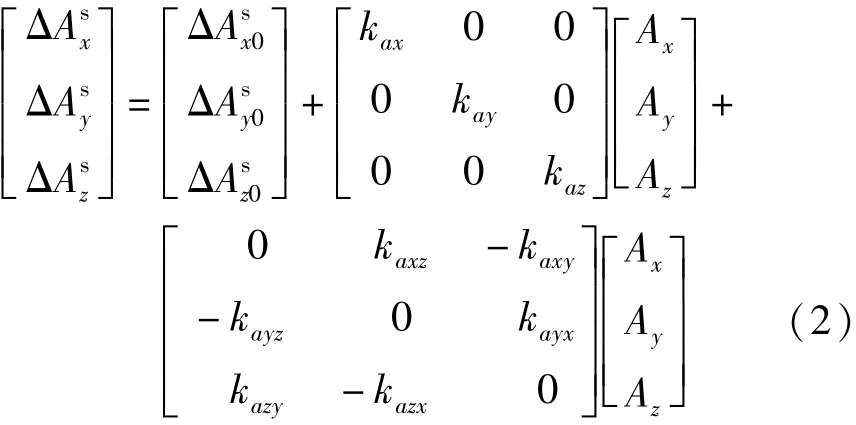
调制型捷联惯导系统中,陀螺仪和加速度计安装位置如图1所示。每组陀螺和加速度计沿同一轴线安装,敏感轴相同。此外,从式(1)~(2)可以看出,两类测量组件的输出误差模型相似。因此,对于调制型捷联惯导系统,旋转方案若能够抵消陀螺仪的各项误差源,就一定能够满足加速度计。因此,本文推导器件偏差抵消原则的过程中,以陀螺仪为主要研究对象。

图1 惯性仪表安装位置示意图
2 相对地理系旋转的旋转方案设计原则
2.1 陀螺仪常值漂移抵消原则
假设IMU的初始位置与载体系重合,定义初始位置的IMU系为s'系,因此有=I。旋转机构带动IMU绕ozb轴旋转至任意位置,定义IMU处于任意位置时IMU系为s系,转换矩阵的形式为
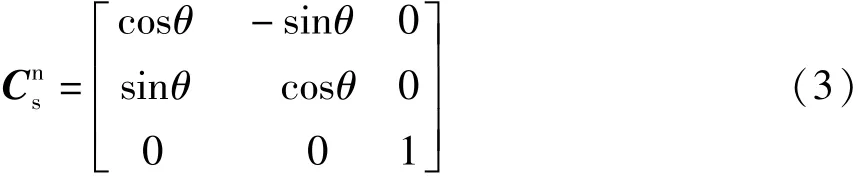
其中:θ为IMU绕ozb轴转过角度。
停位时间Ts内,陀螺漂移沿导航系投影的累积误差为
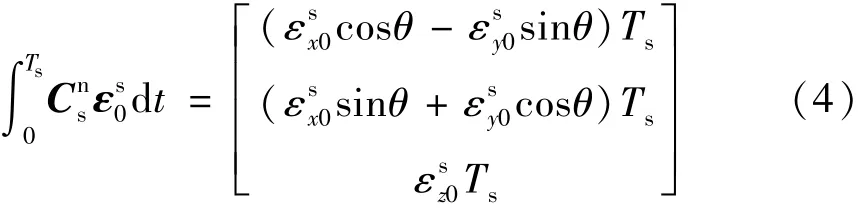
可见,在IMU绕ozb轴转过θ角的停位过程中,陀螺常值漂移沿导航系的累积误差与转角θ和停位时间有关。
将IMU停位于θ+180°处,此时有cos(θ+ 180°)=-cosθ,sin(θ+180°)=-sinθ,则在该位置陀螺常值漂移沿导航系的累积误差为
其中:角标'为IMU停位于θ+180°处的陀螺漂移累积误差。
将式(4)与(5)相加,有

由此得出结论:陀螺绕ozb轴旋转至任意角度的停位过程中,由陀螺常值漂移引起的沿导航系累积误差可以通过停位在相对于ozb轴相差180°的对称位置来抵消。
此外,以上提出的对称位置停位原则无法抵消转轴方向上的器件误差,该问题可以通过改变IMU的初始位置来抵消,即使方位轴陀螺仪沿着-ozb方向进行转停运动。
这样,以四个停位位置为一组,能够抵消三轴陀螺常值漂移在停位过程中沿导航系的所有累积误差。图2描述了该抵消过程。
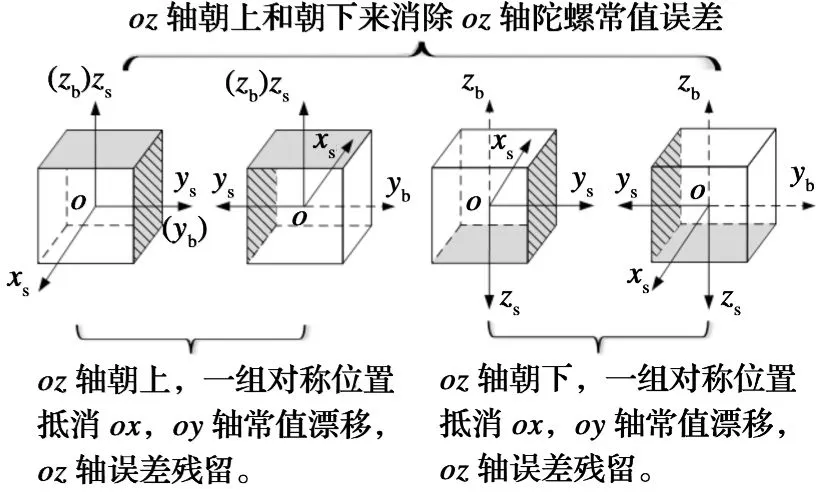
图2 停位过程陀螺常值漂移抵消原则
该结论同样适用于陀螺绕oxb或oyb轴旋转至任意角度的停位过程中,抵消陀螺常值漂移累积误差。
2.2 陀螺仪刻度因数误差抵消原则
定义IMU在任意位置时的IMU系为s系,
IMU停位过程中,陀螺仪只感受地球自转角速度,理论输出为
其中:Ω为地球自转角速度;φ为当地纬度。
由于刻度因数误差的存在,导致陀螺输出误差沿导航系投影为
以IMU绕ozb轴旋转为例,来分析旋转方案设计原则。IMU绕ozb轴旋转至任意位置θ时,矩阵代入式(9),得到陀螺输出误差沿导航系投影在停位时间内的累积结果为
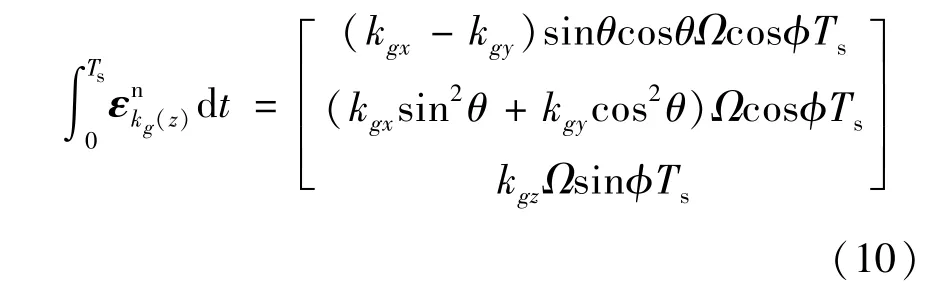
其中:(z)为绕ozb旋转停位的累积过程。
3.企业每年统一、定期、集中组织开展合规管理人员培训,将国内外最新的合规理念、案例、动态、法律法规以集中授课的形式带给各级合规管理人员,满足其对合规专业知识的需求,同时能够让合规管理人员意识到企业合规工作是系统的、不断完善和进步的,增强对开展合规工作的自信心。
观察式(10)可知,IMU绕ozb轴旋转至任意位置时,由刻度因数误差引起的累积误差与停位时间和停位位置有关,停位时间越长,累积误差越大。改变停位位置,作为该停位过程的抵消位置可消除部分累积误差,抵消停位位置的原则是尽量同时满足sinθ'cosθ'=-sinθcosθ,sin2θ'=-sin2θ, cos2θ'=-cos2θ,其中θ'表示新停位位置。
(1)只有当θ'=kπ,θ=kπ(k=1,2,…)时,满足sin2θ'=-sin2θ=0;
(2)只有当θ'=(k+1/2)π,θ=(k+1/2)π时,满足cos2θ'=-cos2θ=0;
(3)结合(1)~(2)可知,sin2θ'=-sin2θ, cos2θ'=-cos2θ不能同时成立;
(4)若 θ'≠kπ/2,θ≠kπ/2,sin2θ'>0, sin2θ>0,cos2θ'>0,cos2θ>0,则sin2θ'≠-sin2θ', cos2θ'≠-cos2θ;
(5)θ'=θ+90°时,sinθ'cosθ'=-sinθcosθ条件成立。
结合式(10)和以上五条结论可知,oxn轴方向累积误差可通过θ'=θ+90°的一组位置抵消;oyn轴方向累积误差无法被完全消除,只能改变累积误差形式;ozn轴方向累积误差,即转轴方向的累积误差无法改变。
以最大限度消除累积误差为设计原则,令IMU停位于θ'=θ+90°的新位置,在停位时间内的累积结果为
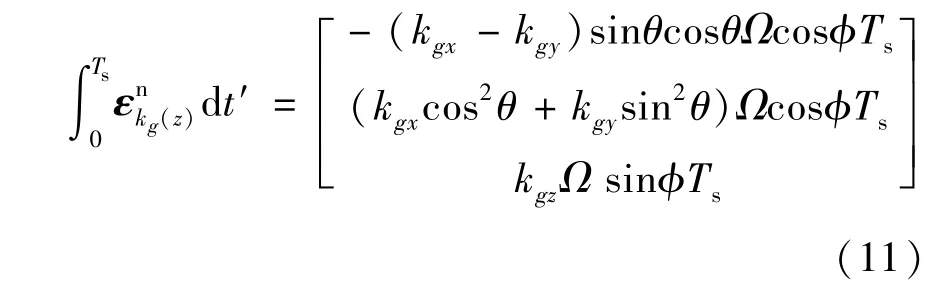
式(10)与(11)相加,得到

因此,IMU绕ozb轴旋转至相差90°的一组位置,能够抵消陀螺沿oxn轴方向的累积误差,使oyn轴方向累积误差与停位无关,与水平轴两陀螺刻度因数误差都有关系;转轴方向累积误差无法改变。
利用相似推导方式,得到IMU旋转时的陀螺刻度因数误差抵消原则:无论IMU绕哪个轴旋转,同一角度范围内的正向和反向旋转运动同时存在,能够抵消部分由陀螺刻度因数误差引起的累积误差,残留累积误差只存在于oyn和ozn方向,且残留误差只与旋转时间和三轴陀螺刻度因数误差有关,与旋转角速度和旋转方向无关。特别的,当IMU绕oxb轴旋转时,残留累积误差只与kgy和kgz有关,与kgx无关。转动过程中,刻度因数误差与调制转速ω有关的耦合误差项可以完全消除,但与地球转速有关的耦合误差项无法完全消除。
此外,利用相同推导方法,可得到陀螺仪安装误差抵消方式,由于篇幅有限,这里不再赘述。
2.3 惯性组件误差项抵消原则
结合上述结论,以IMU绕ozn轴旋转为例,表1列出了停位过程的惯性组件误差抵消原则,表2列出了转动过程的惯性组件误差抵消原则。表中结论同样可以作为IMU绕水平轴旋转的惯性组件误差抵消原则。
3 单轴旋转调制正反转停方案
3.1 单轴旋转方案设计
根据惯性组件常值误差抵消原则,设计单轴正反转停方案为:以IMU与载体坐标系的方位轴重合为起点,IMU绕ozb轴正转180°(定义顺时针旋转为正)、反转90°、正转180°、反转270°,每个位置停留Ts=800 s。旋转方案如图3所示。图中, A,B,C,D表示四个停留位置;a,b,c,d表示四个旋转过程。

表1 停位过程的惯性组件误差抵消原则
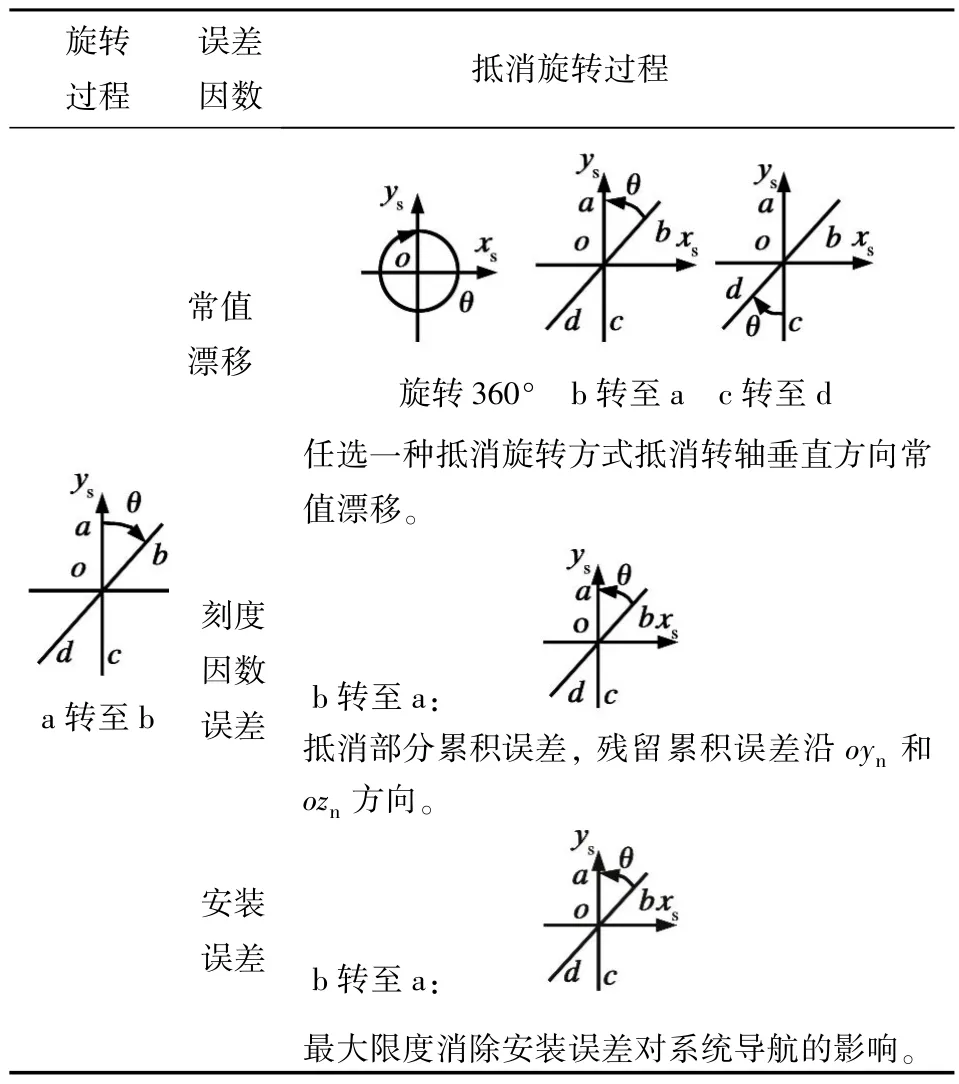
表2 转动过程的惯性组件误差抵消原则
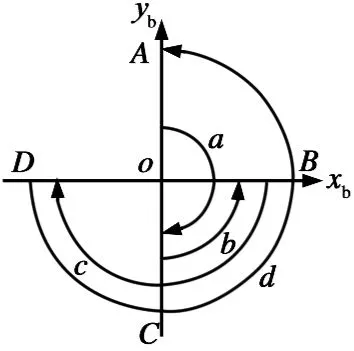
图3 单轴正反转停调制方案
3.2 单轴旋转方案仿真分析
为了验证本节提出的单轴正反转停调制方案,利用仿真试验验证。IMU各误差项的设定值如表3。采用两组单轴正反转停旋转方案,其中两组旋转方案转动方式相同,只是旋转方案一中停位时间Ts=100 s,方案二中停位时间Ts=800 s;转动过程中转动角速度ω0=6(°)/s,仿真时间48 h。
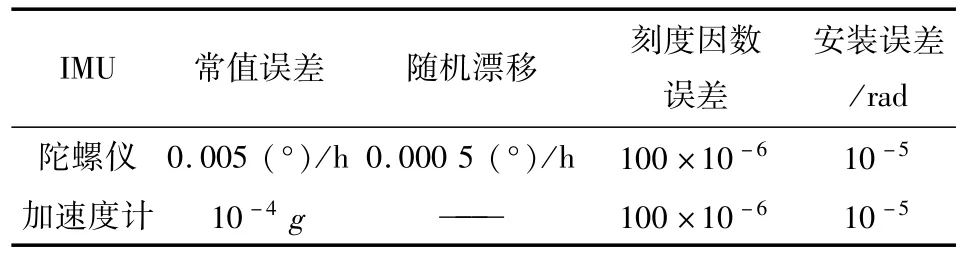
表3 IMU各误差项设定值
图4~6分别为静止状态、Ts=100 s和Ts= 800 s的单轴旋转调制下,系统解算速度误差、失准角和定位误差曲线。
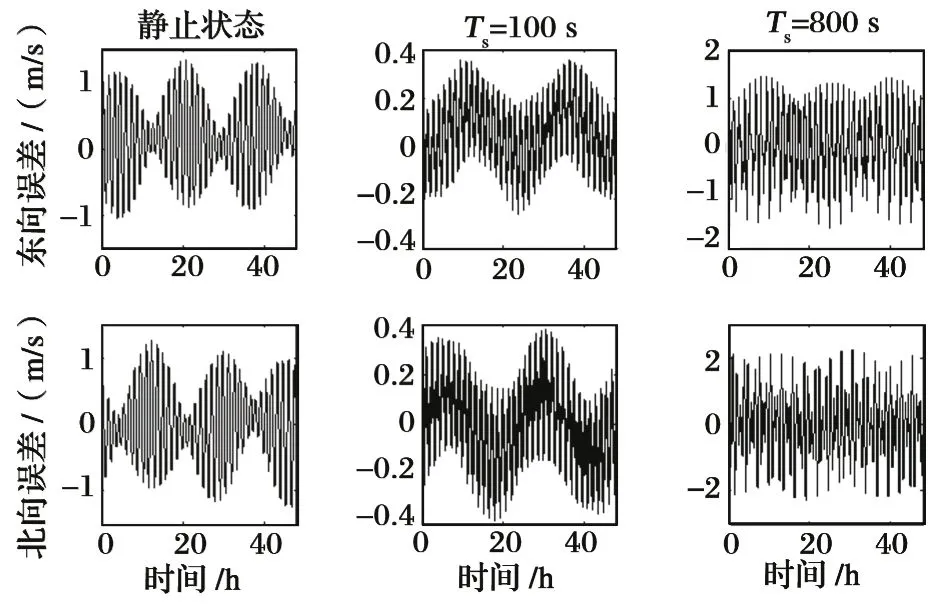
图4 速度误差曲线
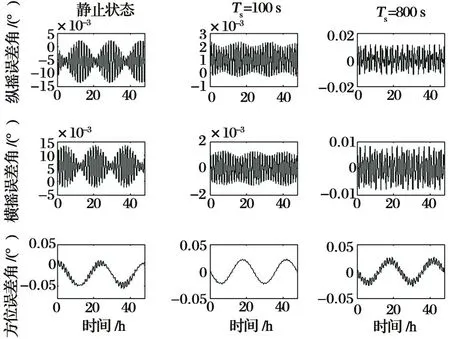
图5 失准角曲线
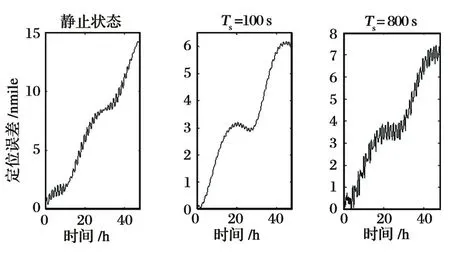
图6 定位误差曲线
从图4~6中可知,相较于静止状态,单轴旋转调制状态下速度误差和失准角中傅科调制舒勒周期的现象被减弱;相较于Ts=100 s,Ts=800 s时,系统解算速度误差和失准角振荡带宽增大,精度差于静止状态。从图6中可知,单轴旋转调制能够有效地减小系统定位误差:静止状态系统定位误差48小时15海里,调制后的定位误差减小到48小时7海里,两种停位时间下,系统定位误差均得到了较好地抑制。相较于时Ts=100 s,Ts=800 s的定位误差出现了明显的振荡。这一现象显然与调制周期有关,周期越长则误差振幅越大,调制周期为100 s是比较合适的。
4 结 论
本文在建立惯性组件误差输出模型的基础上,以陀螺仪为主要研究对象,提出了陀螺常值漂移、刻度因数误差的旋转调制抵消原则。分析结果表明,陀螺常值漂移在调制过程中对导航解算影响可以完全被消除,但对于相对地理系的旋转调制方案,地球自转角速度和刻度因数误差和安装误差的耦合效果无法被完全消除。根据上述研究成果,设计了单轴旋转方案并进行了仿真实验,结果表明,通过单轴旋转,惯导系统定位误差得到了有效抑制,但当调制周期过长时,姿态误差和速度误差振幅增大。因此,调制周期不宜过长,Ts=100 s是比较合适的。
[1]赵剡,滕冲,杨辉,等.预测与健康管理在惯导系统中的应用研究[J].航空兵器,2014,(2):49-53.
[2]全振中,石志勇,王毅.捷联惯导在线标定技术[J].现代电子技术,2012(9):128-131.
[3]李博文,姚丹亚.低成本车载MEMS惯导导航定位方法[J].中国惯性技术学报,2014,22(6):45-48.
[4]李魁,徐烨烽,张仲毅,等.旋转惯导系统误差自补偿原理分析及试验验证[J].系统工程与电子技术,2011,33 (10):21-25.
[5]孙枫,孙伟.旋转自动补偿捷联惯导系统技术研究[J].系统工程与电子技术,2010(1):122-125.
[6]李仁,陈希军,曾庆双.旋转式捷联惯导系统误差分析[J].哈尔滨工业大学学报,2010(3):368-372.
[7]郝燕玲,张义,孙枫.单轴旋转式捷联惯导方位对准研究[J].仪器仪表学报,2011(2):309-315.
[8]王鑫哲.基于旋转IMU的捷联惯导系统自补偿技术研究[D].哈尔滨:哈尔滨工程大学,2008.
[9] Zhang Lundong,Lian Junxiang,Wu Meiping,et al.Research on Auto Compensation Technique of Strap-down Inertial Navigation Systems[C]∥International Asia Conference on Informatics in Control Automation and Robotics,2009:350-353.
[10]储海荣,段镇,贾红光,等.捷联惯导系统的误差模型与仿真[J].光学精密工程,2009,17(11):2779-2785.
[11]Ishibashi S,TsuKioKa S,Sawa T,et al.The Rotation Control System to Improve the Accuracy of an Inertial Navigation System Installed in an Autonomous Underwater Vehicle[C]//Underwater Technology and WorKshop on Scientific Use of Submarine Cables and Related Technologies,2007:495-498.
[12]Yun C S,GooKPC.A Calibration Technique for a Redundant IMU Containing Low Grade Inertial Sensors[J]. ETRIJournal,2005,27(4):418-425.
[13]严恭敏.捷联惯导系统动基座初始对准及其它相关问题研究[D].西安:西北工业大学,2008.
[14]Cappa P,Patane F,Rossi S.Two Calibration Procedures for a Gyroscope-Free Inertial Measurement System Based on a Double-pendulum Apparatus[J].Measurement Science and Technology,2008,5(19):1-10.
[15]Gu D Q,Naser E S,Taher H,et al.Coarse Alignment for Marine SINSUsing Gravity in the Inertial Frame as a Reference[C]//Position,Location and Navigation Symposium,IEEE/ION,2008:961-965.
[16]刘星伯.基于捷联航姿系统的舰船瞬时线运动信息测量研究[D].哈尔滨:哈尔滨工程大学,2009.
Research on the Design Principle of Rotation Modulation Scheme Relative to Geography Frame
Meng Xiangye1,Wang Qiuying2
(1.China Airborne Missile Academy,Luoyang 471009,China;2.Harbin Engineering University,Harbin 150001,China)
Rotationmodulation scheme is the critical componentof rotation strapdown inertial navigation system,the design of rotation modulation scheme is very important before navigation.Firstly,the principle of navigation error caused from inertial deviceswith different rotation and position to stop is analyzed.Then the rotation principle ofmodulation scheme relative to geography frame is proposed.According to the above research,a one-axis rotation and rest scheme are designed and simulated.The simulation results show that this scheme can inbibit the inertial navigation system position error effectively.
inertial navigation system;rotation modulation scheme;inertial device;design principle
TJ765.3
A
1673-5048(2015)03-0018-05
2015-03-12
孟祥晔(1984-),男,河南洛阳人,工程师,研究方向是空面武器系统测试。
