转差频率矢量控制技术在蓄电池叉车中的应用
2015-05-06李春卉
李春卉
(军事交通学院军事物流系,天津300161)
蓄电池叉车的驱动主要是直流电动机和交流感应电动机两大类。交流感应电动机具有功率大、易维护、结构简单等优点,而且其变频调速系统可以实现低速大转矩、高速恒功率控制,具有更广的调速范围[1]。但是交流感应电动机的控制方式多而且复杂,常用的有V/f(电压/频率)控制、转差频率控制、矢量控制、无编码器矢量控制等,如果控制方式设计不当,会出现调速控制器发热、效率低等问题。因此,正确设计蓄电池叉车的控制方式至关重要。本文结合蓄电池叉车的使用特性,将转差频率矢量控制技术应用于蓄电池叉车中,并取得了较好的试验效果。
1 转差频率矢量控制策略
1.1 矢量控制基本原理
矢量控制技术利用坐标变换将三相系统等效为两相系统,再按转子磁场定向的同步旋转变换实现对定子电流励磁分量与转矩分量之间的解耦,从而达到分别控制交流电动机的磁链和转矩的目的。转子磁链定向矢量控制基本方程为[2]
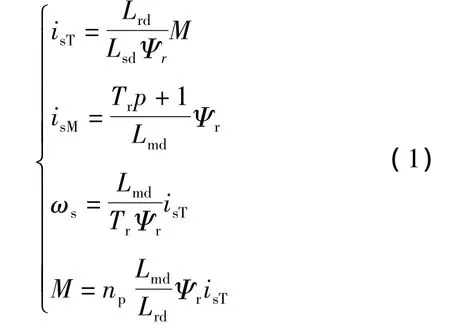
式中:Lsd为定子绕组的等效自感;Lrd为转子绕组的等效自感;Lmd为定子和转子的等效互感;Tr为转子电路时间常数;p为微分算子;M为转矩;Ψr为转子总磁链;ωs为转差角频率;isT为定子电流转矩分量;isM为励磁电流;np为定子极对数。
在电气传动控制系统中,都要服从的基本运动方程为

式中:Te为电磁转矩;TL为负载转矩;J为转动惯量。
从式(2)可以看出,要提高调速系统的动态性能,主要依靠控制转速的变化率dω/dt。显然,通过Te控制就能达到控制dω/dt的目的。转差频率矢量控制就是通过控制转差角频率ωs来控制Te,从而间接控制电动机的转速。
1.2 矢量控制系统控制策略
蓄电池叉车的矢量控制采用间接磁场定向矢量控制,磁链观测器采用电流模型法,被检测信号为定子电流和电动机转速[3],控制策略如图1所示。矢量控制过程如下:
(1)转矩给定M*由速度调节器ASR给出,通过矢量变换器可确定出定子电流转矩分量给定值、励磁分量给定值。ω为实际转速,φs为定子电压矢量转角,根据式(1)计算出转差角频率给定值ωs,经过积分运算得到定子电压矢量转角φs,即ω)dt。
(2)电流反馈通过电流传感器测量逆变器输出的定子电流iA、iB,由iC=-(iA+iB)计算出 iC,通过Clark变换将定子电流iA、iB、iC变换成两相定子电流 iα、iβ;然后再通过 Park 变换将 iα、iβ转换为旋转坐标系电流isT、isM。
(3)通过电流调节器及2r/2s、2s/3s坐标变换得到三相交流分量,记为,再通过 SVPWM控制算法来控制逆变器isT和isM。
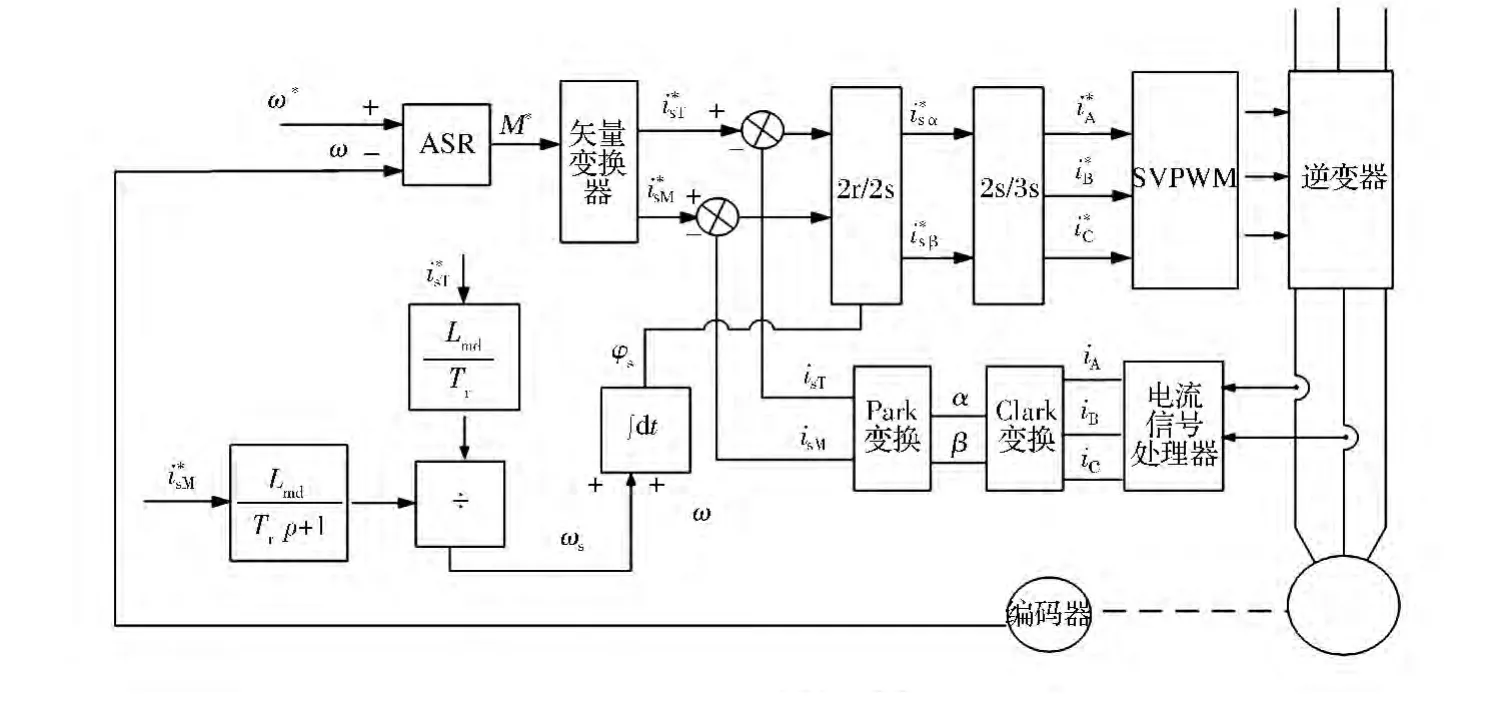
图1 控制策略框图
2 硬件设计
蓄电池叉车控制系统框图如图2所示,包括矢量控制运算模块、功率逆变单元及其驱动模块、检测模块、通信模块等4个模块。
控制系统以英飞凌公司的16位XC164CM微处理器作为控制核心,采样定子各相电流、计算交流电动机的转速和相对位置;运用矢量控制算法得到电压空间矢量的PWM控制信号,该信号经过功率放大和光耦隔离电路后,驱动MOSFET功率管;监控整个系统的运行状态,当系统出现故障时及时切断PWM信号。

图2 蓄电池叉车控制系统框图
检测模块主要对系统各部分运行参数进行监视,主要包括电池电压检测、电压和电流检测、转速检测等。考虑到定子电流检测精度和实时性是影响整个系统精度的关键因素,采用霍尔电流传感器实现定子电流iA和iB的测量,由于iA+iB+iC=0,因此,采样其中两路电流即可以计算得到三相电流。速度检测电路采用精度为每转64个脉冲的增量式光电编码器检测转子位置,其输出的A、B相正交编码脉冲经电压转换后输入到微处理器,采用M/T法测速[4],从而保证在低速和高速时测速的准确性。
3 软件设计
软件分为主程序和中断服务程序两个部分。主程序主要完成系统初始化、模拟量检测、故障诊断保护以及响应各中断子程序;子程序包括故障诊断保护、PWM调制中断、SVPWM子程序、CAN通信中断等。矢量控制策略的实现,主要依赖于各个中断子程序的设计,中断服务程序流程如图3所示。
4 实验结果
将该控制系统装配于2 t交流蓄电池叉车进行实验。
4.1 相电压、相电流测试结果
调速控制系统输出的U、V、W三相相电压输出波形如图4所示。可以看出,三相电压PWM波形变化情况一致,且相邻两相电压在相位上基本互差120°。图5为V相相电流波形,中部为V相霍尔电流传感器输出波形,下方为V相相电压波形,可以看出,相电流波形滞后于相电压波形约90°,且从图4和图5的实验波形可以看出电动机电流、电压变化非常平滑。
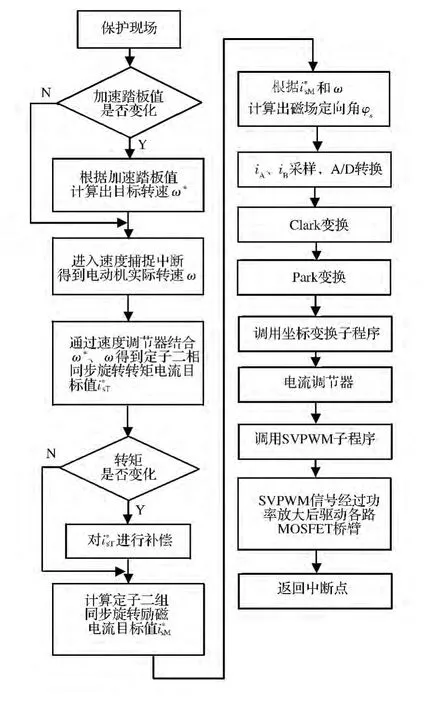

图4 U、V、W三相相电压波形
4.2 SVPWM驱动信号实验
控制系统的逆变电路采用SVPWM 控制,实验波形采集频率在50 Hz情况下的SVPWM波形(测功机转矩设为4 N·m)。图6为逻辑分析仪测量所得的栅极驱动电压波形和相电压,U、V、W三相上下桥臂驱动信号PWM信号与相电压反馈情况是对应的,交流电动机能够正常工作。从U、V、W三相相电压可以看出,SVPWM子程序符合SVPWM的7段调制模式。

图5 V相相电流与相电压波形
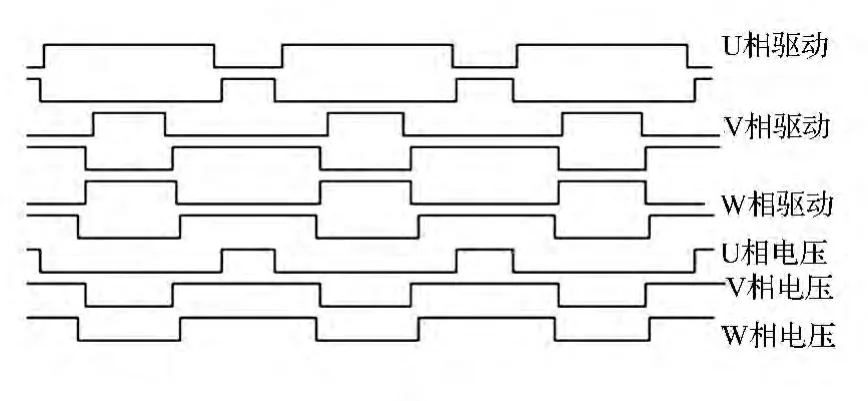
图6 MOSFET栅极驱动电压与相电压
5 结语
本系统采用以XC164CM微处理器为控制芯片,实现了转差频率矢量控制策略,并通过软件生成SVPWM波形控制蓄电池叉车的逆变器。实验验证,该系统具有控制策略简单、稳定性好、动态响应快、转矩变化平稳、加速性能好的特点。
[1] 徐丽芳,宋文斌.交流电动控制技术在叉车中的应用研究[J].机电工程,2010(11):58.
[2] 王会涛,钱希森,王吉校.转差频率控制的异步电动机矢量控制调速系统的研究和仿真[J].电气传动,2007(11):80.
[3] 欧卫斌,李军生.基于DSP的异步电动机矢量控制系统的设计与仿真[J].工矿自动化,2009(6):40.
[4] 赖东林,刘志刚,刁利军.基于DSP的转差频率控制系统在电动游览车中的应用[J].电气应用,2006(9):141.
