飞机电传操纵及模拟加载系统实验台开发
2015-05-05郝魁红何永勃
孟 忱, 郝魁红, 何永勃
(中国民航大学 航空自动化学院, 天津 300300)
飞机电传操纵及模拟加载系统实验台开发
孟 忱, 郝魁红, 何永勃
(中国民航大学 航空自动化学院, 天津 300300)
为研究飞机电传操纵系统性能、给电传操纵系统设计提供实验依据,设计开发了飞机电传操纵及模拟加载系统实验台,实现全机飞控操纵系统半物理仿真。学生可以通过实验台操纵杆对飞机姿态进行调整,模拟飞机飞行过程中的姿态调整。并可完成永磁同步电机系统辨识、PID参数调试、电动加载模拟以及四余度方向舵故障模拟的实验,使学生更好熟悉四余度EMA机电作动器工作原理,为电传操纵系统的试验研究提供了平台。
飞机电传操纵系统; 实验平台; 模拟加载系统; 四余度EMA; 半物理仿真
飞机电传操纵系统是现代民航客机主要的电子飞行操纵系统,具有机械操纵系统无法比拟的优点,除了重量轻,体积小之外,还可以进一步改善飞机的操纵品质,对飞机结构变化的影响不敏感,并能减少维护工作量以及更容易与自动飞行控制系统相耦合[1]。但是,由于系统复杂,涉及电传、液压、余度管理等,目前国内高校用于研究和教学的平台很少,功能也很不完善。
本实验台的设计采用了永磁同步电动机控制、电动加载模拟、余度管理等多项先进技术,可以实现全机飞控操纵系统半物理仿真,不仅可以用来检测电传操纵系统整体及相关零部件的可靠性,还能为研发电传操纵系统提供基础数据,帮助学生详细了解飞机在多种状况下的工作状态,对系统性能深入掌握,增强系统排故能力很有意义。
1 飞机电传操纵及模拟加载系统实验台功能设计
1.1 系统联调功能
系统联调是对飞机电传操纵及模拟加载系统提供视景仿真和实验环境,通过操纵杆对飞机姿态进行调整,同时向副翼、升降舵和方向舵下发运动指令,模拟飞机真实飞行过程中的姿态调整,从而实现全机飞控操纵系统半物理仿真。
1.2 永磁同步电机系统辨识功能
永磁同步电机有诸多优点,但具有强耦合和强非线性的特点,电机系统稳定性易受环境影响,为保证相关的控制算法有效运行,首先需要获得电机相关参数,对电机系统进行辨识[2-8]。本实验台具有对永磁同步电机进行电流环、速度环以及位置环辨识的功能。
1.3 永磁同步电机PID参数调试功能
PID控制器性能与其控制参数密切相关[9],因此所研制的实验台应具备PID参数调试的功能,本实验台可以展开对PID控制器参数进行合理优化的研究。
1.4 电动加载模拟功能
电动加载系统是用来模拟飞行器舵机在飞行过程中受到的空气动力力矩载荷,是一种地面半实物仿真设备[10]。本实验台采用该系统取代过去的现场试验,具有良好的可控性、无破坏性、全天候以及操作简单方便的优点,并且这种试验可以多次重复,其经济性是原有的现场试验所无法比拟的。
1.5 四余度方向舵的PID参数调整及故障模拟功能
全时间、全权限的电传操纵系统必须具有相当于机械操纵系统的可靠性,应用余度技术是提高系统任务可靠性、安全可靠性和容错能力的有效手段。本实验台的四余度舵机伺服系统具备PID参数调整及故障模拟功能,可以模拟绕组开路故障、驱动电路故障、舵面角位置传感器故障、上位机通信故障、CPU故障、控制电源故障、驱动电源故障等多种故障。并且故障诊断快速准确,在发现故障后迅速启动余度管理,对输出功率进行重新分配,保证系统正常运行。
2 电传操纵及模拟加载系统实验台结构组成
实验台主要由电动舵机伺服系统、电动加载系统、四余度舵机伺服系统等构成,整个实验系统布局见图1。包括控制机柜、实验台、总操作台和各个舵面的单独操作实验台。操作台是整个系统联机运行时的总操作台,通过控制计算机同时控制5个舵面的运动;副翼控制柜、升降舵控制柜和方向舵控制柜分别控制副翼、升降舵和方向舵的硬件控制电路和驱动电路,能够对5个不同的舵面进行独立操作实验。仿真实验区可以通过Matlab进行仿真实验。

图1 系统总体布局图
2.1 电动舵机伺服系统
电动舵机伺服系统结构如图2所示,舵机控制器接受上位计算机给定的舵面偏角信号,输出给定指令并通过驱动器驱动电机旋转,通过滚珠丝杠等传动机构转化为直线运动,推拉舵面偏转,保证舵面在规定的响应时间内以一定的精度趋近给定偏角,从而改变飞机的航行姿态或航行轨迹,以达到控制飞机飞行轨迹的目的;同时通过各类传感器,获得电机电流、电机转速、舵面位置等信息,并反馈给控制器和计算机,实现伺服控制[11-12]。

图2 舵机伺服系统结构图
2.2 电动加载系统
加载系统的主要功能是产生需要的模拟负载。在电动伺服加载系统中,多余力矩的存在严重影响了加载系统的控制性能和加载精度,克服多余力矩干扰是提高电动伺服加载系统性能的关键[13]。本系统采用模糊控制的思想,根据舵机的摆动幅值和运动频率对控制参数PID进行调整,根据不同的幅值和频率查询PID参数表选择不同的参数进行控制,对电动加载过程中的多余力的消除有很好的效果。
2.3 四余度舵机伺服系统
对于实用的四余度舵机伺服系统,不是简单的硬件和软件的4倍配置,这样不仅为配置资源花费更多费用,还可能大大增加系统出错的概率[14-15]。如果设计不当,系统可靠性反而下降。本方案采用的四余度舵机伺服系统机械系统原理框图和电气原理框图见分别见图3和图4。

图3 机械系统原理框图
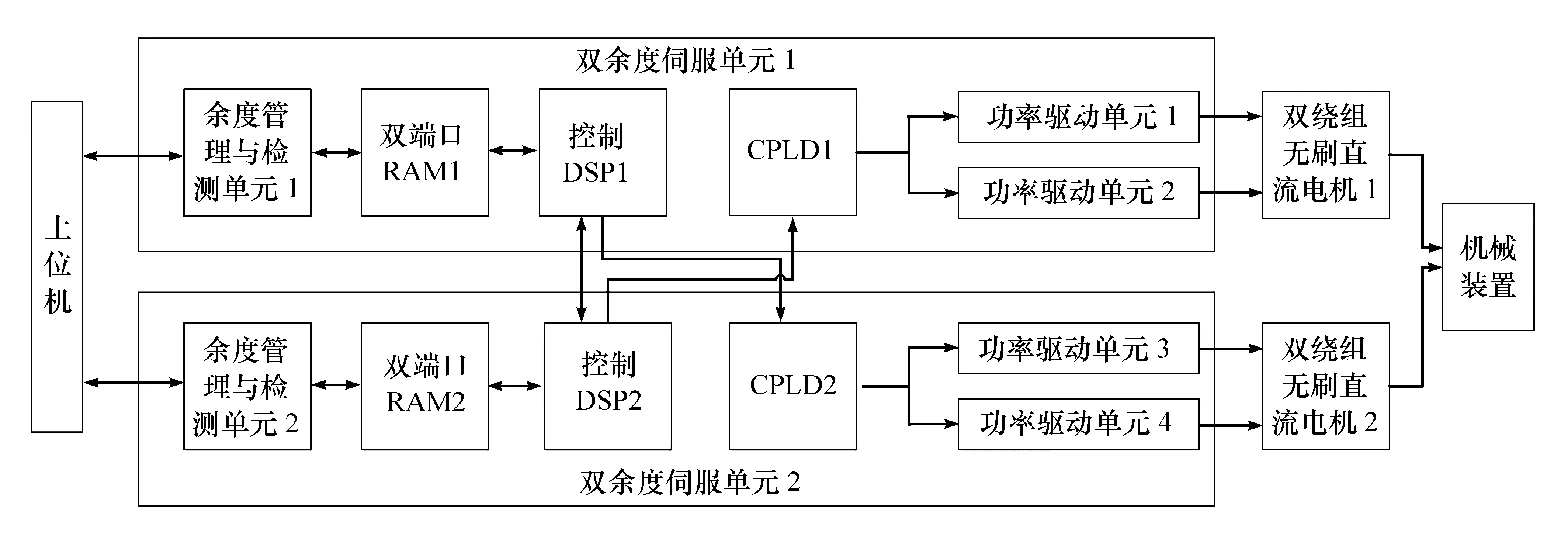
图4 电气原理框图
四余度舵机伺服系统实物图见图5。

图5 四余度舵机伺服系统
3 飞机电传操纵及模拟加载实验台实验项目设计
3.1 实验系统联调演示
通过与下位机进行通信,通过手柄、油门杆和飞行脚舵向下位机发送飞机升降舵、方向舵、副翼各个舵面的偏转指令,然后从下位机接收真实的舵面偏角用于飞机飞行状态的解算和姿态的显示。视景界面见图6。
3.2 机电作动器EMA伺服系统控制实验
实验项目包括系统电流闭环控制实验、速度闭环控制实验、位置环控制实验及静态加载实验。下面以位置环控制实验为例进行介绍,其余实验过程与之相同。

图6 视景界面
EMA位置跟踪特性测试而言,根据所设计系统的伺服参数有:跟踪类型、幅值、频率、实验时间,PID控制器参数,将上述参数输入测控系统中,并输入加载参数:加载类型、负载幅值、负载频率,启用电动加载系统,进行EMA加载时的位置跟踪特性测试,可测得EMA力矩变化曲线、位置及速度变化曲线。例如,在对舵面施加模拟气动负载条件下,系统跟踪4°、3 Hz正弦给定的位置闭环伺服实验,由上位机软件监测获得实验曲线如图7和图8所示。
图7中红色曲线为给定曲线,蓝色曲线为跟踪曲线。由图可看出,舵机伺服系统位置跟踪3 Hz正弦给定曲线,跟踪性能良好,运行平稳,没有过冲现象。因为机构减速比的原因,位置跟踪存在相位滞后现象,但总体满足系统要求。

图7 上位机软件监测位置闭环实验位置波形
图8中由左至右,从上至下分别为对应位置闭环实验过程中监测到的电机转速、电机交轴电流、舵面负载、电机三相电流的变化情况。

图8 上位机软件监测位置闭环实验其他数据波形
3.3 机电作动器EMA伺服系统电流环、速度环、位置环参数辨识实验
选择EMA伺服系统电流环、速度环或位置环参数辨识实验后,启动电机工作,舵面开始偏转,开始系统辨识。当辨识动作完成时,辨识的相关数据自动加载到Matlab状态空间中,通过Matlab开始对实验数据进行系统辨识,并将系统辨识所得的模型参数进行显示,可查看辨识效果。
3.4 四余度EMA伺服系统故障模拟实验
3.4.1 全数字模型演示
全数字模型是指电机、控制器、传感器、作动机构等全为数字模型,完全在上位机上通过Matlab程序运行,以此来进行四余度舵机全数字仿真,经过参数配置后,运行系统,获得仿真结果。
3.4.2 四余度EMA伺服系统故障模拟实验
如图9所示,通过改变故障模拟盒对应故障开关的状态,模拟多种故障的发生。完成EMA伺服系统参数配置后,启动系统,可测得四余度EMA位置响应曲线和电机转速曲线,据此检测各种故障状态下四余度EMA伺服系统的工作状态。

图9 故障模拟开关
例如,当电气余度A、B和D都发生故障被切除,故障电机1所在通道离合器断开,系统进入容错工作方式,伺服功能由剩余的一个电气余度实现,此时位置响应曲线、电机转速曲线分别如图10和11所示。图10中,位置给定为5°、0.5 Hz的正弦波曲线,在12 s左右使电气余度A、B和D故障,由位置反馈曲线可以看出,系统位置跟踪比较平滑,但有些许变形。图11中,发生故障后电机2的转速出现一定抖动,电机1转速下降到零不输出。电机2的电气余度C承担全部输出功率,其母线电流是正常运行时母线电流的好几倍。

图10 容错工作方式4时位置响应曲线
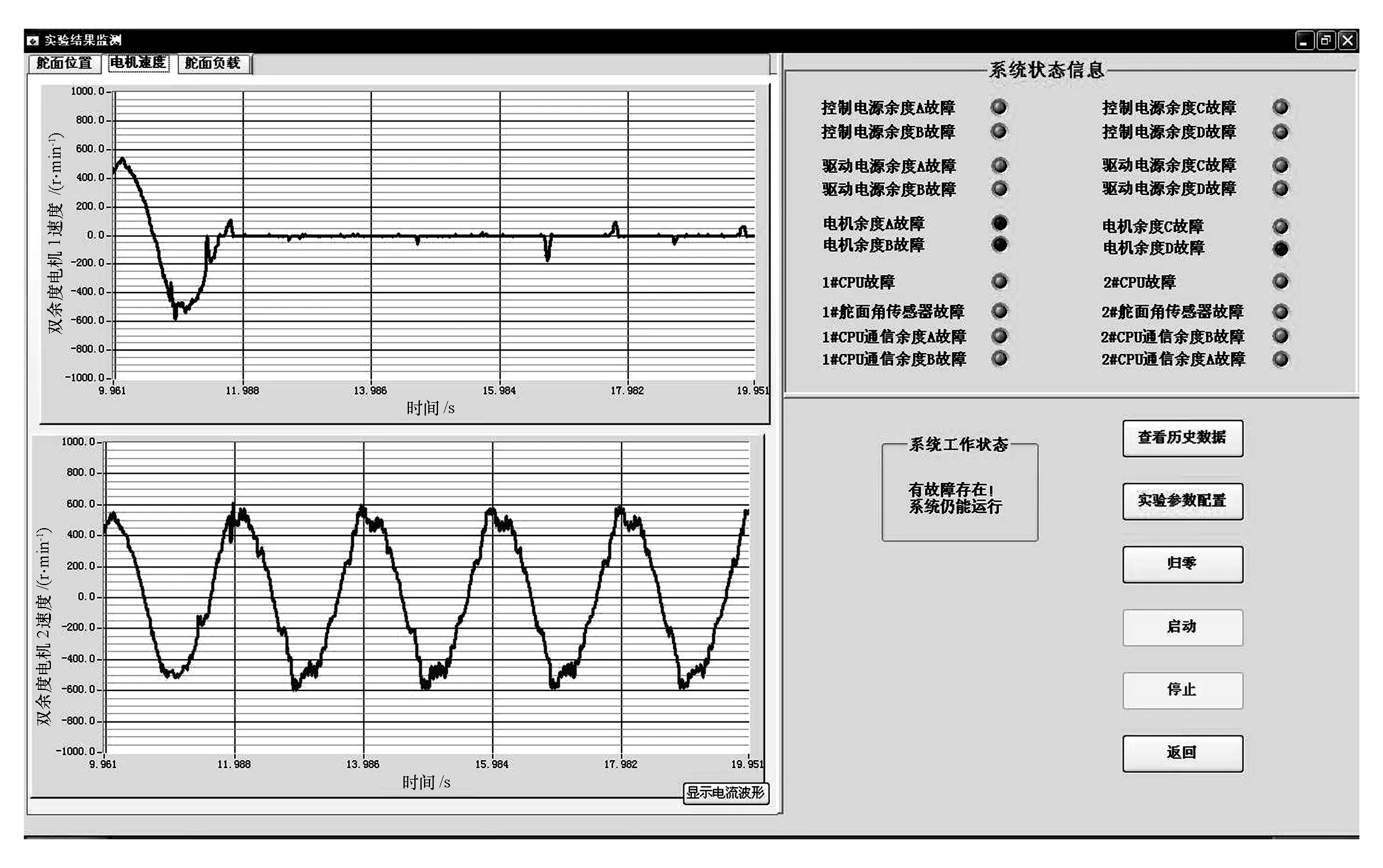
图11 容错工作方式4时电机转速曲线
4 结束语
电传操纵及模拟加载系统实验台针对一些主要的电传操纵系统试验,都能很好地实现模拟与实验,在实验台设计开发的基础上,将进一步细化实验项目,完善实验台功能。本实验台具备良好的开放性,可以与多种相关实验台融合,下一步将协同飞机运动控制系统实验台,使用飞机运动控制系统实验平台数据进行电传操纵系统相关实验项目的开发,从而获得更加详实的数据支持,这对飞机电传操纵系统的开发及教学具有十分重要的意义。
References)
[1] 高金源,焦宗夏,张平.飞机电传操纵系统与主动控制技术[M].北京:北京航空航天大学出版社,2005.
[2] 丁洁.双频率采用数据系统的辨识[D].无锡:江南大学,2011.
[3] 杨静.伺服系统的参数辨识[D].西安:西安电子科技大学,2010.
[4] 刘永钦.基于FPGA的永磁同步电机参数辨识的研究[D].无锡:江南大学,2008.
[5] Cao Xianqing,Fan Liping. Real-time PI controller based onpole assignment theory for permanent magnet synchronous motor[C]//IEEE International Conference on Automation and Logistics. Qingdao,China,2008:211-215.
[6] Abjadi N R,Soltani J, Pahlavaninezhad M, et al. A nonlinear adaptive controller for speed sensorless PMSM taking the iron loss resistance into account [C]//Proceedings of the Eighth International Conference on Electrical Machines and Systems. 2005(1):188-193.
[7] Khov M,Regnier J, Faucher J. Detection of turn short-circuit faults in stator of PMSM by on-line parameter estimation[C]//International Symposium on Power Electronics,Electrical Drives,Automation and Motion. Ischia, Italy, 2008:161-166.
[8] Khov Makara,Regnier J, Faucher Jean. On-line parameter estimation of PMSM in open loop and closed loop[C]//IEEE International Conference on Industrial Technology. Gioosland,VIC,2009.
[9] 鲍建成.永磁同步电机PID参数优化研究[J].计算机仿真,2012,29(4):247-250.
[10] 杨峰.基于DSP的舵机电动加载平台的设计[D].西安:西北工业大学,2007.
[11] 兰根龙,齐蓉,吴春.永磁同步电动舵机控制系统设计与实现[J].微电机,2014,47(3):73-77.
[12] 李兵强,吴春,林辉.基于参考输入学习的永磁同步电机高精度位置伺服系统[J].2012,32(3):96-102.
[13] 齐蓉,林辉,陈明.被动式电动加载系统多余力的研究[J].控制与决策,2006,21(2):225-228.
[14] 刘冠志,林辉,李颖.双余度舵机控制系统设计[J].微电机,2010,43(1):50-53.
[15] 窦满锋,冯智海.双余度稀土永磁直流电机可靠性研究[J].微电机,2004,37(6):6-7.
Development of experimental platform for airplane fly-by-wire and electric loading system
Meng Chen, Hao Kuihong, He Yongbo
(School of Aviation Automation,Civil Aviation University of China,Tianjin 300300,China)
Experimental platform for airplane fly-by-wire and electric loading system is designed to study the performance of airplane fly-by-wire control system and provide the experimental basis for the system.Hardware-in-the-loop(HIL) simulation of airplane control system can be completed.Students can adjust the aircraft attitude by a joystick of the experimental platform to simulate aircraft flight attitude adjustment.It can also do experiments such as permanent magnet synchronous motor system identification, parameter debugging in PID control, electric loading and the fault simulation of the four-redundancy aircraft rudder.It can make students better understand the four-redundancy EMA how to work. It also provide a platform for the research of fly-by-wire system.
airplane fly-by-wire system; experimental platform; simulation loading system ; four-redundancy EMA;HIL simulation
2015- 02- 03
中国民航大学实验技术创新基金项目(17-13-01);中央高校基本科研业务费专项项目2013(3122013D022)
孟忱(1990—),男,河南商丘,硕士研究生,研究方向为电传操纵系统与余度控制
郝魁红(1967—),男,河南开封,博士,教授,研究方向为检测技术与自动化装置.
E-mail:mchencauc@sina.com
V249.4;G484
A
1002-4956(2015)10- 0105- 06
