一种基于ARM的智能液压阀门控制器
2015-04-24刘红
刘 红
(吉安市高级技工学校,江西 吉安343009)
在液压阀门控制器的研究和发展中,如何更有效的实现制动是迫切需要解决的问题。在开启和关闭控制过程中的控制精度,直接关系到产品质量的问题。
针对目前市场上使用的液压阀门控制器存在的体积庞大、控制精度较低,难于现场标定和维修等问题。我们采用先进的信息化处理技术,设计了一种基于ARM的液压阀门定位器控制系统,满足了液压阀门控制器的开启、关闭精度。这对于形成我国自己生产的新型智能电动阀门执行机构产品具有重要的现实意义。
1 系统结构
1.1 基本原理
该系统采用低功耗ARM9 S3C2410为控制电路的核心,工作时,通过HART通信模块先输入设定的阀门开度电流信号,工作开始后该信号通过JTAG调试电路与液压阀门控制器反馈的实际开度信号进行比较,通过参数整定算法调节偏差和偏差变化率信号,输出相应宽度的脉冲信号,控制电磁阀的开启和关闭,从而实现液体的精确输出。
本液压阀门控制器为典型的计算机控制系统,系统控制原理如图1所示。
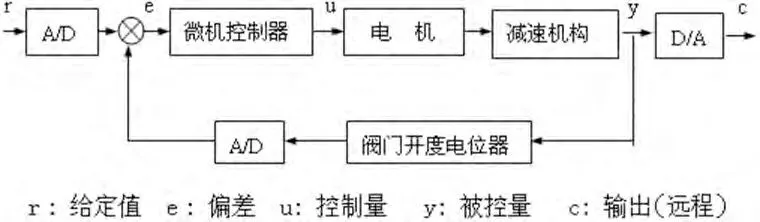
图1 阀门控制系统原理框图
1.2 硬件系统基本组成
硬件系统基本组成如图2所示。它包括控制电路的核心32位ARM微处理器S3C2410,JTAG调试电路,光耦驱动电路,LCD显示,信号反馈、温度、复位电路、I/V转换电路等接口以及电源部分组成。
在阀位控制电路中,设计了一个开度电位器输出的0.5-4.5V直流信号来代表阀门开度的位置信号,因此,对这一位置信号的采样过程,将直接影响到阀门开度的控制精度。为了消除这一信号过程中的高频干扰,提高控制精度,我们采用数字滤波方法来实现。
2 软件功能和算法的实现
本液压阀门控制器的参数整定包括零点、行程和灵敏度的参数整定。采用12位的A/D转换器来完成正定参数的调整。,其分辨率为1/4096。本系统把各相对值统一转换为单位是0.00025的数字进行比较。
在软件编程中,我们把零点调整的25﹪,按零点值范围为0~1023换算处理,而反馈电位器的电压变换范围按0-4095进行处理。在控制过程中还需加入灵敏度调节,满足零点值和反馈值相等而使电机停止转动的条件。
为了防止系统振动,本协议、本系统设定的灵敏度可调整范围是0~0.5%。即开度值和远程给定值的差值在0.5%的变化范围内认为开度值与给定值一致。在软件编程中我们将000H~0FFFH,即0~4095表示对应的A/D转换值,通过公式PROP=PROP×40/4095实现灵敏度A/D的转换,简化了计算步骤。
在零点调整基础之上同时还需要进行行程调整,调整范围是20%~100%,换算处理后数值范围是819-4096,对应于开度值20%~100%。系统设计了液晶显示器,可以通过液晶显示行程调整的过程。
3 小结
这种基于ARM的智能液压阀门电动执行机构,以ARM核32位嵌入式RISC微处理器为核心,采用改进的整定参数算法满足了液压阀门控制器的开启、关闭精度。与传统的液压阀门电动执行机构相比,控制的精度、可靠性得到了进一步提高。实际应用表明,具有一定的实用价值。
[1]钱荣,赵志斌.阀门电动执行机构中检测模块的设计[J].阀门,2013(2):8-10.
[2]施爱平,沈今括.基于PROFIBUS-DP总线的智能阀门电动执行机构的设计[J].机床与液压,2009,37(11):154-156.
[3]郑文杰.基于HART协议的智能电动执行机构设计[J].工业仪表与自动化装置,2007(2):12-15.
[4]张雅洁,张自强.基于ARM的煤矿井下供水智能控制系统[J].科技视界,2015(2):253-254.
[5]车金刚.浅谈电动执行机构发展和典型故障处理[J].科技视界,2015(2):343-344.