非量测相机倾斜航空影像空三加密精度评价
2015-03-11马晨杨辽池梦群刘莹郑宏伟
马晨,杨辽,池梦群,刘莹,郑宏伟
(1.中国科学院新疆生态与地理研究所,乌鲁木齐830011;2.中国科学院大学,北京100049)
非量测相机倾斜航空影像空三加密精度评价
马晨1,2,杨辽1,池梦群1,2,刘莹1,2,郑宏伟1
(1.中国科学院新疆生态与地理研究所,乌鲁木齐830011;2.中国科学院大学,北京100049)
鉴于倾斜空三加密及其精度评价工作的重要性,使用非量测型相机获取倾斜航空影像,利用计算机视觉的SIFT特征匹配算子对影像的空三加密进行改进,然后对加密结果进行精度评价。结果表明:对于人工构造物密集地区的立体影像,特征点的数量密集,空三加密精度倾斜影像检查点的精度相较下视影像精度高;影像的分辨率为10cm,量测结果平面x、y的中误差都在精度范围中,高程z值中误差略大;增加控制点数目后,平面x与y的精度明显提高。分析影响试验结果的误差来源有:航摄质量、控制点布设与量测精度、内业人员操作、区域网平差方法等。
空三加密;倾斜航空影像;SIFT;计算机视觉;航空摄影测量;地面控制点
0 引 言
近年来,随着对城市三维模型的需求,传统的下视镜头可以获得主体建筑的高度信息和顶部纹理信息,但在获取建筑物的侧面纹理上能力有限,难以满足城市建筑物三维数据获取的要求。而倾斜摄影可以实现建筑物的正直影像与其立面纹理的倾斜影像相结合,是城市景观三维建模的主流趋势[1]。倾斜航空摄影是在同一飞行平台上搭载多台或多种传感器,同时从多个角度采集地面影像,从而克服了传统航空摄影技术只能从垂直角度进行拍摄的局限性,能够更加真实地反映地物的实际情况,弥补了正射影像的不足[2]。倾斜影像技术的应用,使目前高昂的三维城市建模成本大幅降低,大大提高三维城市建模的速度[3]。
空中三角测量又称作空三加密,是三维重建的一个重要环节。空中三角测量的数据质量决定着最终产品的数学精度,因此对空中三角测量数据的质量评定显得尤为重要。近年来全数字自动化空中三角测量的技术日益成熟,作业平台日益实用完善,现基本上进入到规模化的生产阶段,但目前的文献中对倾斜空三加密的精度还没有一个确切评价标准,对倾斜的精度评价工作较少,然而空三加密的精度对最后模型的建成有很大的影响。所以对其数据质量的检查验收及质量评定已提到日程上来[4]。
1 基于计算机视觉的空三加密原理和精度评价方法
1.1 基于计算机视觉的空中三角测量
基于计算机视觉的影像空三加密,是通过计算机视觉技术的相关方法在影像群之间建立一种较为严格的相对关系,通过影像信息反推出拍摄影像时的真实场景,一个完整的立体视觉系统通常可分为图像获取、摄像机定标、特征提取、立体匹配、深度确定及内插等6个部分[5]。通过影像信息反推出拍摄影像时的真实场景,也就是对于一组图像数据中的两幅影像,通过一种空间变换把一幅图像映射到另一幅图像,使两幅图像中在空间中同一位置的点一一对应。
(1)特征点检测与匹配
首先检测每张影像的特征点。SIFT(Scale Invariant Feature Transform)算子是计算机视觉领域非常著名的特征算子,可以很好地避免由于影像变形等原因造成特征点信息的丢失,可以用于模式识别和影像匹配,是一种基于尺度空间的、对图像缩放、旋转甚至仿射变换保持不变性的图像局部特征描述算子。
(2)计算相对定向参数
使用运动模型算法进行相对定向,运动模型算法能够从一组只有二维信息图像中提取出三维信息,可以把它转化为如下问题:有m幅图像,n个空间中的点,有如下方程:

其中,Xij为第j个点在第i幅图像中的二维信息,Pi为第i幅图像的投影矩阵,Xj为第j个点的三维坐标,已知m×n个二维信息,要估算m个投影矩阵和n个点的三维空间坐标,根据特征点的匹配结果已知图像特征点间的对应关系,所以可以利用运动模型算法求得这些特征点的空间坐标。
相对定向用7个参数来确定,其中6个外参,有

为像点的相空间辅助坐标[6]。
然后对运动模型相对定向的结果进行优化,加入附加参数包括相机畸变参数,曝光点pos数据,控制点数据。在影像匹配过程中,从金字塔各个层面,分别进行匹配,进行多次迭代。
(3)区域网平差
区域网平差采用光束法平差方法。由于光束法区域网平差是从原始的影像坐标观测值出发建立平差数学模型的,所以只有在光束法平差中才能最佳的顾及和改正影像系统误差的影响[6]。
空三加密的流程如图1所示。

图1 空三加密流程
1.2 空中三角测量的精度评价方法
空三加密的实际精度与理论精度是有一定差异的。测量中偶然误差的影响与点位的分布有关,而实际情况是复杂的,往往要受到偶然误差和残余系统误差的综合影响。下面是用来衡量空中三角测量实际精度的估算公式:

其中,X控,Y控,Z控为控制点的外业测量坐标,X加,Y加,Z加为控制点的内业加密坐标,n为控制点的个数[7]。
2 试验方案及试验结果分析
2.1 试验区概况
本次试验位于新疆维吾尔自治区吐鲁番市市区,试验区地势平坦,主要以平地为主,测区面积约为15km2,测区范围:89°09′29.26″E~89°12′10.11″E,42°56′08.82″N~42°57′35.40″N试验区概况图如图2所示。

图2 试验区概况图
2.2 影像获取
本文采用的是非量测型相机,为自制的倾斜航摄仪,是由5个镜头组成的倾斜航摄仪器(图3)。倾斜航摄仪获取两种影像,一种是传统的垂直向下的影像,另一种是四张倾角为40°到60°之间的倾斜影像,同时拍摄东南西北4个方向(图4),并配合定位系统获取高精度的地理位置和姿态信息。
量测型相机的内方位元素是已知的,其影像具有明确的几何位置关系。但量测型相机价格昂贵,仪器笨重,进行外业拍摄时很不方便。非量测型数码相机采用存储卡存储影像,可直接与计算机连接,与量测型相机相比,信息处理周期短,在地形复杂地区进行外业拍摄具有很强的机动灵活性[8]。但非量测型相机不能提供内方位元素,并且相机安装、调试过程中难免会产生一些残余像差,造成物镜构象畸变,所以在飞行前需要对相机进行标定,计算出相机的镜头畸变参数和内方位元素值。采用DLT(直接线性变换方法)对非量测型相机进行检校,计算出内外方位元素。5个相机的相机畸变参数(依次为相机焦距,径向畸变参数,切向畸变参数,像主点偏移)如表1所示。

图3 倾斜相机镜头示意图

图4 倾斜相机5个镜头影像示意图
2.3 试验方案
试验采用的航空摄影相机焦距为35mm,影像幅面6000像素×4000像素,像元分辨率为5.966μm,航向重叠度为75%,旁向重叠度为70%,航线方向为东西走向,共22条航线,相邻航线间距离为100m,每条航线73个曝光点。航摄相对航高250m,设计GSD(航摄像机CCD一个像元对应的地面尺寸大小)下视为5cm,其余镜头为10cm。测区内布设4行,7列共计28个地面控制点。试验区航线与控制点分布示意图如图5所示。

表1 相机镜头物理参数
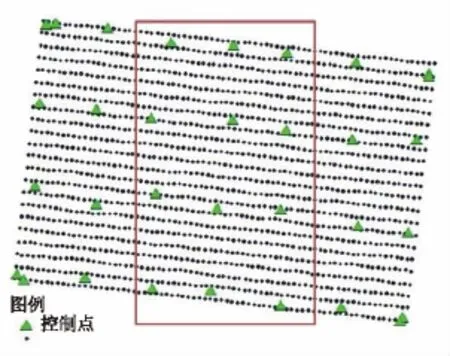
图5 试验区航线与控制点分布示意图
试验一选取的区域范围为图中红框标记区域范围,使用左视镜头、下视镜头、右视镜头,共3个镜头的数据,总共1892张航空影像,12个控制点,其中6个控制点,6个检查点。
试验二用为图中所有区域范围,采用前视镜头、后视镜头、左视镜头、右视镜头、下视镜头,共5个镜头的数据,总共8030张航空影像,使用27个控制点,其中13控制点,14个检查点。
2.4 精度分析
试验采用SIFT特征点检测对多视角影像进行检测,在试验中不同的地物场景所对应的各个视角影像SIFT特征点检测的情况不同,对于人工构造物密集的地区的立体影像,特征点的数量密集,在地物比较稀疏的地区,特征点数量不足。在特征点检测时,结构纹理特征不明显的区域结果不好,不能保证特征点数量,需要额外的在这种区域上增加控制点,使得在区域网平差中,以权重数值的方式分配到各个匹配的同名点和控制点上,这样就可以保证纹理特征不好的区域的匹配精度,优化整体的定向参数。城区的特征点匹配过程示意图如图6所示。
将得到的相机焦距,畸变参数,经过优化后的各角度影像和影像的6个外方位元素,进行立体量测。试验一量测时分别在下视的影像对中和倾斜的影像对中进行量测。下视影像量测结果见表2,倾斜影像结果见表3。试验二的量测结果见表4。

图6 特征点匹配过程

表2 试验一对下视影像对量测结果/m
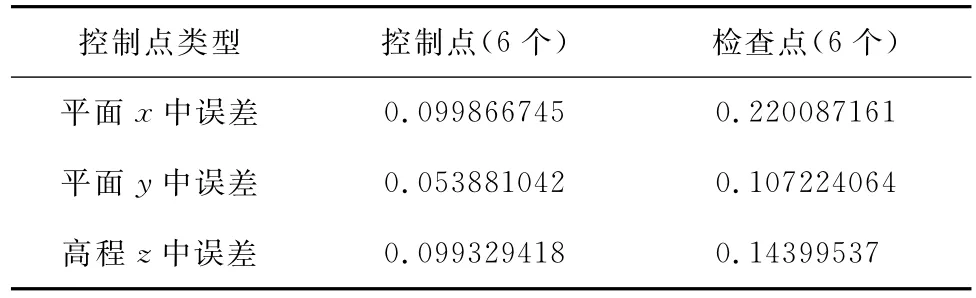
表3 试验一对倾斜影像对量测结果/m
从量测结果中可以看出在下视影像和倾斜影像中,平面x中误差、平面y中误差、高程z中误差(m)都符合航空摄影测量的要求,在控制点的精度上,下视影像的精度比倾斜影像的精度高,而检查点的精度则是倾斜影像的精度比较好。影像的分辨率为10cm,量测结果平面x,y的中误差都在精度范围中,高程z值中误差略大。

表4 试验二倾斜影像量测结果/m
在倾斜影像的量测结果中,由于控制点的数目增多,平面x与y的精度明显比试验一的精度高,控制点的精度比检查点的精度好,高程z中误差略大。
通过计算及精度统计,认为影响加密成果精度的因素有多种,其中主要因素为影像质量包括分辨率、清晰度、摄影比例。另外还包括飞行质量,像控点测量精度,外业像控的选点、刺点、描述准确情况;内业加密时对像控点点位的判定准确程度;内业加密人员利用光标对像控点的切准情况;内业加密点的选取、在不同像片上的判位;平差方法不同等[9]。
(1)加密精度受到航摄质量的影响
航摄影像是空三加密最原始的资料和基础,飞行的质量影响着加密的成果,如:影像的质量(包括影像的灰度、色调、分辨率)、影像的重叠度、飞行航高的稳定度、影像的倾角、旋偏角、航线的质量,都是保证空三加密顺利进行的重要因素。
(2)加密精度受到控制点布设与量测精度的影响
控制点在外业对点的选取,刺点以及对点的描述情况上也是影响加密成果的原因之一,控制点选取在影像清晰,特征明显容易判读的地物上,内业在刺点过程中的准确度会提高,反之会给加密结果带来一定的误差,高精度的控制点可以有效防止加密误差的传递和积累。此外,控制点数目与分布也会造成误差,区域网中每个位置上的像控点在平差中所起的作用是不同的,如:4个角点的像控点主要是归划比例尺和改正模型变形,航线中间的像控点主要是改正模型弯曲等,所以区域网的大小、形状以及像控点的布设方案及其在像片上的位置等因素对空三成果精度有着举足轻重的作用[10-11]。
(3)精度受到内业人员操作的影响
内业加密人员对控制点位置判读的准确程度对加密精度也会造成影响,不同影像上对同一控制点判读位置的误差,内业加密人员的工作经验、对影像的判读能力,立体感的好坏,都会直接对加密结果有影响,这种误差是不可避免的。
(4)精度受到区域网平差方法的影响
实际生产中常用平差软件所遵循的理论依据相同且平差方法均采用光束法区域网平差,但各软件在同名点匹配、平差计算过程中相关参数权值设置方法、区域网粗差剔除算法等方面也不尽相同。因此,针对初始条件完全相同的区域网平差工作,采用不同平差软件,其计算结果会有所差异[10-11]。
3 结束语
空中三角测量是航空摄影测量的重要步骤,它的精度结果直接影响着后期数字高程模型、数字地面模型、数字正射影像、三维建模的质量结果。以多次的试验和生产经验对倾斜航空影像的空三精度进行评价,对造成精度结果误差的可能来源进行分析,主要有航摄质量、控制点的数目及布设、内业人员的操作、区域网平差的方法和软件等。找到问题的关键点,避免操作过程中的误差积累,才能保证空中三角测量的质量和精度,提高工作效率。
[1]桂德竹,林宗坚,张成成.倾斜航空影像的城市建筑物三维模型构建研究[J].测绘科学,2012,37(4):140-142.
[2]李祎峰,宫晋平,杨新海,等.机载倾斜摄影数据在三维建模及单斜片测量中的应用[J].遥感信息,2013,28(3):102-106.
[3]李镇洲,张学之.基于倾斜摄影测量技术快速建立城市3维模型研究[J].测绘与空间地理信息,2012(4):117-119.
[4]许娅娅,王月莉.全数字空中三角测量数据检查验收及质量评价方法的探讨[J].测绘通报,2006(1):33-35.
[5]张祖勋.数字摄影测量与计算机视觉[J].武汉大学学报(信息科学版),2005,29(12):1035-1039.
[6]张剑清,潘励,王树根.摄影测量学[M].武汉:武汉大学出版社,2003.
[7]卢红艳.浅谈空中三角测量的精度[J].中国地名,2010(7):74.
[8]杨军.非量测数码相机检校方法的研究[J].测绘科学,2009(s1):89-91.
[9]朱肇光,孙护,崔炳光.摄影测量学[M].武汉:武汉大学出版社,1994.
[10]吴正鹏,张晓东,奚歌.浅谈全数字空中三角测量精度影响因素及质量控制[J].测绘与空间地理信息,2013,36(11):184-186.
[11]高文革,范永杰,宋倩,等.空三加密在数字摄影测量中的精度分析[J].山东国土资源,2010,26(12):26-29.
Accuracy Assessment of Oblique Aerial Images and Aerial Triangulation Measurement Based on Non-metric Digital Camera
MA Chen1,2,YANG Liao1,CHI Meng-qun1,2,LIU Ying1,2,ZHENG Hong-wei1
(1.Xinjiang Institute of Ecology and Geography,Chinese Academy of Sciences,Urumqi 830011;2.University of Chinese Academy of Sciences,Beijing100049)
Aerial triangulation is a crucial step in three-dimensional(3D)modeling.The traditional photogrammetry cannot satisfy the requirement of 3Dmodeling in current commercial applications.However,recently,the rise of oblique photogrammetry has a good complement to the traditional aerial photogrammetry.In this paper,we proposed a novel approach based on the utilization of oblique aerial images taken by agroup of non-metric digital cameras.We improved the process of aerial triangulation via a SIFT matching computer vision approach in the first step.Secondly,we analyzed the accuracy of aerial triangulation as well as the sources of several errors which affect the result of the experiment.We found that feature points are dense when artificial structure areas on stereo images are few.The accuracy of the aerial triangulation and oblique aerial images is better than that of aerial images.Resolution of the image is 10cm,error in plane x and y are in the range of precision,the elevation error is slightly larger in the z value;the precision of plane x and y has improved significantly after increase the number of control points.The sources of errors which affect the result of the experiment are quality of aerophotography,control points setting and accuracy in measurement,personnel operating,method of block adjustment,etc.
aerial triangulation;oblique aerial image;SIFT;computer vision;aerial photogrammetry;ground control point
10.3969/j.issn.1000-3177.2015.06.014
P231
A
1000-3177(2015)142-0071-05
2014-10-20
2014-11-25
千人项目(Y474161);国家863项目(2013AA122302)。
马晨(1990—),女,硕士,研究方向为摄影测量与遥感。
E-mail:sensen810@163.com
