尺度不变特征转换算法的多源SAR影像匹配
2015-03-11黎旻懿杨杰李平湘郭琳
黎旻懿,杨杰,李平湘,郭琳
(1.武汉大学测绘遥感信息工程国家重点实验室,武汉430079;2.首都师范大学资源环境与旅游学院,北京100048)
尺度不变特征转换算法的多源SAR影像匹配
黎旻懿1,杨杰1,李平湘1,郭琳2
(1.武汉大学测绘遥感信息工程国家重点实验室,武汉430079;2.首都师范大学资源环境与旅游学院,北京100048)
鉴于直接利用SIFT算法进行SAR影像间的匹配不能得到很好的效果,考虑SIFT算法在应对噪声以及对镜像影像进行匹配的局限性,提出了针对SAR影像之间匹配的SIFT算法预处理。首先利用影像与影像之间的空间信息进行匹配,之后利用SIFT算法进行局部特征点匹配,通过采用RANSAC进行错配点的去除,实现SAR影像的高精度配准。实验结果表明,该文提出的预处理以及错配点的去除为利用SIFT算法进行SAR影像的匹配提供了可能。
合成孔径雷达;SAR;SIFT;匹配;预处理
0 引 言
影像匹配是指利用其两幅影像间灰度、纹理等特征的对应关系,进行相似性和一致性分析,对两幅或多幅存在重叠图像区域的图像之间进行搜索并识别出相邻图像间的同名点对。影像匹配是计算机视觉的基础,在遥感图像处理、医学图像分析、目标跟踪识别等图像分析领域应用广泛[1-3]。
目前,基于特征匹配算法逐渐成为图像匹配的主流研究方向,其相关理论的研究取得快速发展。2004年,加拿大学者David G.Lowe[4]总结并正式提出的SIFT算法通过构建128维的特征描述子,可以准确稳定地提取出特征点并进行高精度的匹配。
而在SAR影像的匹配方面,由于SAR影像所独有的斑点噪声和由于频段不一致引起的分辨率上的差别,使得利用SIFT直接进行SAR影像之间的匹配变得十分困难。杨雪梅等[5]在2010年提出了一种改进SIFT算子,优化了SIFT特征描述子的主方向,用来匹配光学影像和SAR影像;陈敏[6]于2014年提出了基于边缘强度图的光学影像与SAR影像之间的匹配;姜文聪[7]在2013年提出利用机载SAR影像成像特点和几何特性与SIFT算法结合来匹配机载SAR影像。而笔者发现如果利用影像的几何关系以及考虑SAR影像独特斑点噪声的滤波方式,可以有效地提高SIFT算法在SAR影像匹配时的正确率,提出了针对SIFT算法的一系列SAR影像的预处理流程。
1 SIFT特征匹配算法
尺度不变特征转换(Scale-invariant feature transform,SIFT)是一种检测局部特征的算法,该算法通过尺度空间求一幅图中的特征点并获得有关尺度和方向的描述子,利用这些特征进行图像特征点匹配,性能稳定。SIFT算法主要有以下5个步骤:①建立尺度空间;②检测DoG尺度空间极值点;③消去不稳定的特征点;④确定特征点的方向;⑤特征描述子的生成。完成以上5个步骤之后,对得到的特征描述子运用以欧氏距离作为相似性测度的匹配方法,选取出最优的匹配点对,实现特征点之间的匹配。
2 利用多源SAR影像的空间信息进行匹配预处理
通过实验可以发现,对于SAR数据,影响SIFT算法效果的主要有三点:①SAR影像所带有的斑点噪声;②由于升轨降轨的影响,或者由于机载传感器扫描方向的影响,可能主辅影像之间存在较大的旋转,甚至存在镜像现象;③主影像与辅影像之间过大的尺度差异,比如Radarsat-2影像与机载高分辨率影像之间的配准。因此,为了在利用SIFT算法时能达到更好的效果,可以利用SAR影像自带的空间信息进行匹配的预处理,同时根据SAR影像的特点进行噪声的去除。
2.1 噪声抑制
由于SAR成像系统是相干成像的特性,图像中往往具有较严重的斑点噪声[8-10]。针对单/全极化SAR影像采用不同的滤波方式,最大利用影像的信息达到对斑点噪声的抑制。针对单极化SAR数据,采用Lee滤波或者Sigma滤波等滤波方式,针对全极化SAR数据,采用精制极化Lee滤波等极化滤波方式。在实验部分,针对高分辨率的数据,根据具体情况均做了相应的滤波或多视处理,但由于低分辨率数据做滤波容易丢失细节纹理信息故未做处理。
2.2 减轻旋转或镜像的影响
对于一般的星载数据如Radarsat卫星,都会在元数据中提供影像一定的几何信息[11],可以得到影像4个角点的经纬度坐标,通过这些基本的空间几何信息,可以计算得出影像的扫描方向与北方向之间的夹角。如图1所示(本文假设所有数据都是西经和北纬的情况)。
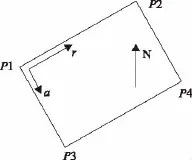
图1 一般星载影像的方向示意图
r所指的方向为距离向,a所指的方向为方位向,N所指的方向为北方向;P1点代表影像第一行近距端的角点,P2代表第一行远距端的角点,P3代表最后一行近距端角点,P4代表最后一行远距端角点。而每个角点都可以通过SAR的严密成像几何模型(R-D模型)或者根据影像头文件中提取的角点坐标得到它们的经纬度坐标。假设坐标分别为P1(lat1,long1),P2(lat2,long2),P3(lat3,long3),P4(lat4,long4)。首先计算方位向与距离向分别两个边界的方向向量。
在距离向上:

在方位向上:

可以取平均得到影像中心的大致方向

然后将这两个向量归一化:
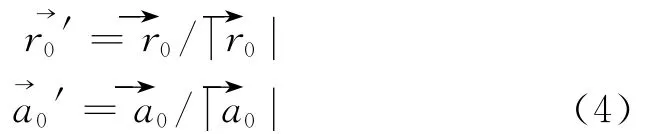
本文将空间按照0°~360°每10°划分一个角度空间,以主影像的方位向为标准,将辅影像旋转到主影像对应的方向上,然后判断辅影像的距离向与方位向的夹角方向是否与主影像上距离向与方位向夹角一致,如果方向刚好相反,则需要对辅影像进行一次距离向上的镜像处理,如图2所示。
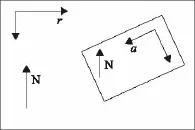
图2 将辅影像旋转到与主影像对应的方向上
2.3 减小尺度差异
目前雷达不同频段的影像分辨率差别很大,在匹配两幅分辨率差别较大的影像时,可以采用一些空间信息消除尺度上过大的差异,同时去除不相关区域的运算,使匹配更加快速而精确。
首先利用影像元数据计算出辅影像的最大最小经纬度区间,然后利用线性插值在主影像上搜寻出覆盖辅影像的区域,仅仅对两幅影像的重叠区域进行处理,并且得到重叠区域的经纬度覆盖范围,即得到点LU和RD在主影像上的像素坐标,如图3所示。
图3 计算重叠范围
然后分别计算在重叠区域内,在主影像的方位向和距离向两个方向,两幅影像的分辨率差异。因为SIFT算法本身就是尺度不变的算法,能处理一定程度下不同尺度影像之间的匹配,所以,对于减小两幅影像之间的尺度差异,并不需要做到十分精确。
本文将辅影像及包围盒压缩或者放大到LU和RD的像素范围内,采用双线性采样法进行重采样,粗略地将辅影像处理成与主影像尺度一致的情况。
2.4 利用RANSAC算法去除错匹配点
由于可信匹配子块本身存在噪声等多因素影响,经过欧式距离相似性判别法所得粗匹配对中可能存在较多的伪匹配对,需要进一步除伪,实现精匹配。
RANSAC[12]是一种通过迭代方式估计模型参数的不确定性方法。RANSAC从一组包含较大噪声或无效点的观测数据中反复选择数据,利用随机子集来达成目标,RANSAC假设给定一组正确数据,可以解出符合数据模型的参数。在特征匹配中,模型即为从一幅图像上的特征点到另外一幅图像上的特征点的射影关系,一个3×3的基础矩阵就可反映其射影关系。利用RANSAC即可实现对基础矩阵的参数估计,以高概率去除伪匹配对。
3 实验结果与分析
本文选择3组数据进行实验,通过利用不同传感器、不同分辨率、不同频率的机载和星载数据进行匹配,验证提出算法的有效性。
(1)机载和星载数据之间的匹配
采用的实验数据为:主影像为Radarsat-2,辅影像为XSAR数据。Radarsat-2的数据为C波段,方位向分辨率为5.1m,距离向为4.7m;XSAR是中国电子科技集团38研究所的一套全极化干涉合成孔径雷达系统,方位向分辨率0.1m,距离向斜距分辨率0.4m,在X波段成像,工作频率为9.6GHz。
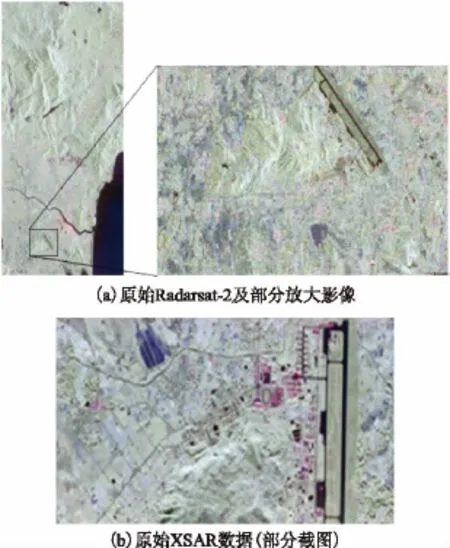
图4 机载和星载数据匹配影像
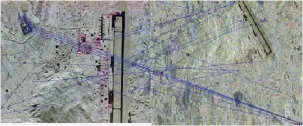
图5 未经过处理的辅影像与主影像进行匹配
如果直接用未经过预处理的辅影像与主影像进行匹配,得到的结果如图5所示。图6为经过预处理后的辅影像与主影像匹配结果(带RANSAC),可以看到图5中无一个正确匹配点,而图6中获得全部6组正确的匹配。
由于主辅影像之间分辨率差异较大,导致辅影像的细节纹理比主影像要丰富很多,主影像在图中机场跑道周围具有丰富的特征信息,而其他区域并不具备明显的特征,所以特征点大多集中在机场跑道。而机场跑道附近的匹配点基本都能与辅影像高分辨率的数据对应上,产生足够纠正机场附近区域的匹配点数。
(2)机载不同频率数据之间的匹配
图7为CASM系统同时获取的不同频率的机载数据:左图为X波段,分辨率为1m,右图为P波段,分辨率为方位向2.5m距离向1.2m。图8为采用预处理后的X波段数据与P波段数据的匹配结果,在进行了RANSAC去除错配点之后,在特征明显的区域得到了一共5组匹配点,其中有3对为正确匹配,带有2组错匹配。
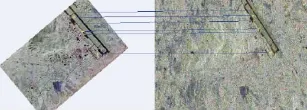
图6 经过预处理及RANSAC处理的结果
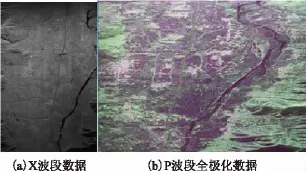
图7 CASM机载系统数据
该实验验证同平台不同传感器之间的匹配性能,在该数据覆盖的范围,纹理特征比较丰富的区域主要集中在图中右侧河流的区域,故最终匹配出的点对也集中在该区域。相比于第一组实验,由于机场为人工地物,相对于河流这种天然地物来说,边缘特征较为突出,状态也更为简单,故此组实验并未表现出如实验1中的效果,在有限的5组最终结果中还有2组为错配点。虽然数据复杂,匹配精度也达到了60%。
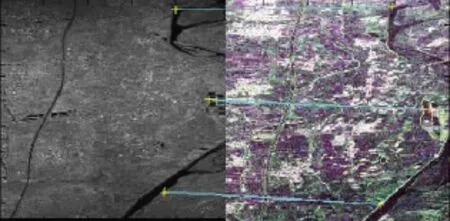
图8 CASM系统不同频率影像之间的匹配结果
(3)不同星载传感器数据之间的匹配
图9中的数据为ALOS和TerraSAR的影像,ALOS影像为L波段数据,分辨率为方位向3.5m距离向9.3m,TerraSAR为X波段,分辨率为1m。以TerraSAR数据为辅影像,进行匹配,并对SIFT结果进行RANSAC处理,得到5对正确匹配点,如图10所示。
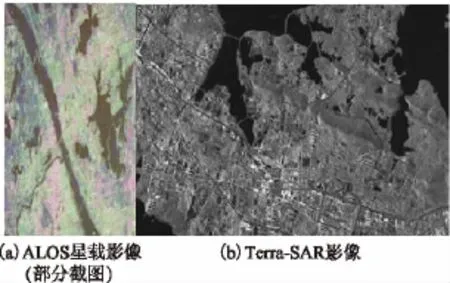
图9 不同星载传感器数据之间匹配用影像
在该组实验中,验证不同星载平台之间的匹配效果。由于平台之间差异十分大,所以该实验难度也大,在将Terra-SAR辅影像做预处理之后,Terra-SAR已经丢失了大部分细节信息,而由于覆盖区域为城区,所以数据在纹理方面看起来显得杂乱,只在湖区与城区的边界区域有明显的边缘信息,而主要的匹配点也由此产生。在本组实验中,即使数据情况十分复杂也产生了较好的匹配结果,产生了可以进行几何变换的特征点对的数目,为下一步的处理提供了可能。
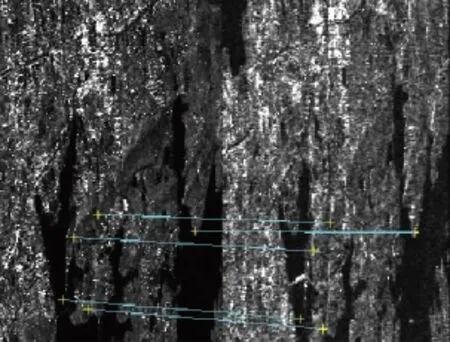
图10 ALOS与Terra-SAR影像匹配结果
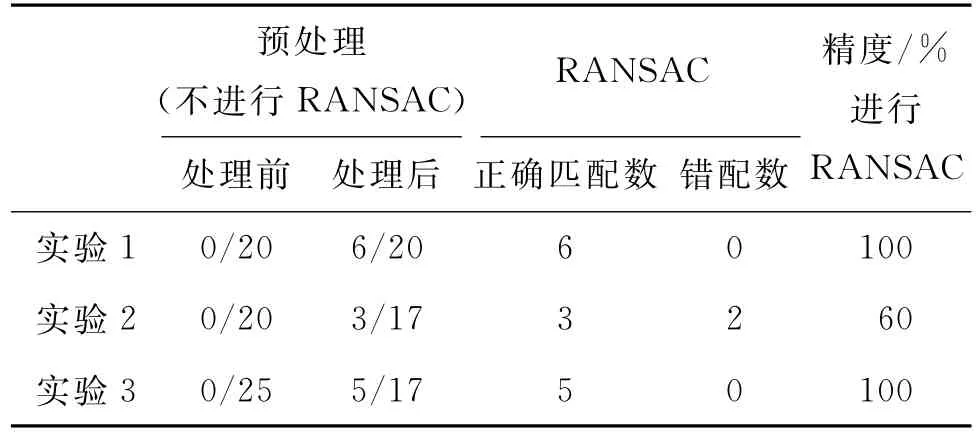
表1 三组实验结果比较
4 结束语
该方法以SIFT为核心,通过影像带有的信息进行可逆的预处理,使得SAR在主辅影像在分辨率、传感器、频率等差异很大并且带有斑点噪声的情况下的匹配变为了可能。对于大部分的星载影像,可以直接从元数据中提取出预处理所需的信息,从而使得基于本文提出的预处理进行匹配的方式可以自动进行。对于元数据信息不丰富的数据,可以通过经典的SAR几何定位模型来得到相应的数据,而这一过程同样也可以自动进行。而进行了本文提出的预处理方式之后,SIFT算法可以以高精度来产生匹配点对,使得后续的影像配准或者图像拼接成为可能。
[1]MAINTZ J B A,VIERGEVER M A.A survey of medical image registration[J].Medical Image Analaysis(S1361-8415),1998,2(1):1-36.
[2]LENG X,LIU J,XIONG Z.A real-time image matching algorithm for navigation system based on bifuracation extraction[J].Acta Automatica Sinica(S0254-4156),2007,33(7):678-682.
[3]冯学智.遥感数字图像处理与应用[M].北京:商务印书馆,2011.
[4]LOWE D G.Distinctive image features from scale-imvaricant keypionts[J].International Journal of Computer Vision(S0920-5691),2004,60(2):91-100.
[5]杨雪梅,龚俊斌,王鹏,等.基于改进SIFT的SAR图像与可见光图像配准[J].航天控制,2010,28(6):13-18.
[6]陈敏.多源遥感影像特征匹配技术研究[D].武汉:武汉大学,2014.
[7]姜文聪.基于SIFT算法的机载SAR影像匹配研究[D].山东:山东农业大学,2013.
[8]LEE J S,GRUNES M R,GRANDI G D.Polarimetric SAR speckle filtering and its implication for classification[C].IEEE Trans.on Geosci.Remote Sensing,1999,37(5):2363-2373.
[9]LEE J S,POTTIER E.Polarimetric radar imaging[M].New York,2009.
[10]王超,张红,陈曦,等.全极化合成孔径雷达图像处理[M].北京:科学出版社,2008.
[11]陈尔学.星载合成孔径雷达影像正射校正方法研究[D].上海:中国林业科学研究院,2004.
[12]FISCHLER M A,BOLLES R C.Random sample consensus:aparadigm for model fitting with application to image analysis and automated cartography[J].Communications of the ACM,1981,24(6):381-395.
Multi-sensor SAR Imagery Matching by Using SIFT
LI Min-yi1,YANG Jie1,LI Ping-xiang1,GUO Lin2(
1.State Key Laboratory of Information Engineering in Surveying,Mapping and Remote Sensing,Wuhan University,Wuhan 430079;2.College of Resource Environment and Tourism,Capital Normal University,Beijing100048)
Scale Invariant Feature Transform(SIFT)has been widely applied in image processing.To a certain extent,the algorithm can keep scale and rotation invariance and weaken the influence of the light.However,directly using SIFT for SAR image matching could not obtain good results as expected because of the speckle noises caused by SAR imaging.In consideration of the limitation of SIFT in noises and mirror image situation,this paper proposes a pre-processing method of SIFT algorithm for SAR image matching,which firstly match images using the geographic information between them,then match local feature points with SIFT and remove mismatching points with RANSAC,finally realize the high-accuracy matching of SAR images.Results show that the pre-processing method proposed by this paper and the removal of mismatching points provide the possibility for SAR image matching using SIFT.
Synthetic Aperture Radar;SAR;SIFT;matching;pre-processing
10.3969/j.issn.1000-3177.2015.06.001
P237
A
1000-3177(2015)142-0003-05
2014-12-22
2015-03-18
黎旻懿(1990—),男,硕士研究生,主要从事SAR数据几何校正研究。
E-mail:lmy0501@whu.edu.cn
