RGB-DSLAM前端视觉里程计的优化算法
2020-05-27董静薇蒋燚铭韩知雨
董静薇 蒋燚铭 韩知雨
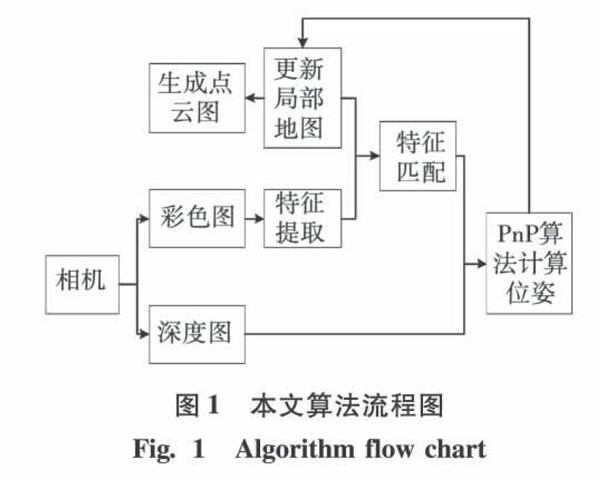

摘 要:针对视觉同步定位与地图构建领域中基于深度相机传感器的算法前端跟踪耗时长,精度差的问题,提出了一种RGB-D SLAM算法的前端视觉里程计实现方案。依据传统的视觉里程计实现方案,采用ORB特征提取算法对图像进行特征提取并计算描述子,与局部地图中地图点进行特征匹配,最后采用PnP算法计算相机位姿。为提高算法跟踪的精准度,提出在计算相机位姿后,利用三角测量进行局部地图中地图点深度的更新。实验采用TUM数据库中fr1系列数据集进行测试,结果表明,该算法在保证实时性的同时,使跟踪过程中的均方根误差平均减小了9.21%。且fr1系列两种数据集通过视觉里程计最后生成点云地图的图像信息熵比传统RGB-D SLAM系统平均提高了11.21%。
关键词:RGB-D SLAM; ORB特征提取;PnP算法;三角测量;局部地图
DOI:10.15938/j.jhust.2020.06.023
中图分类号: TP242.6
文献标志码: A
文章编号: 1007-2683(2020)06-0157-08
RGB-DSLAM Visual Odometry Optimization Algorithm
DONG Jing-wei1,2, JIANG Yi-ming1,2, HAN Zhi-yu1,2
(1.School of Measurement and Control Technology and Communications Engineering, Harbin University of Science and Technology, Harbin 150080, China;
2.The Higher Educational Key Laboratory for Measuring and Control Technology and Instrumentations of Heilongjiang Province, Harbin University of Science and Technology, Harbin 150080, China)
Abstract:In view of the long time-consuming and poor precision of RGB-D SLAM algorithm in the field of visual SLAM, an implementation scheme of RGB-D SLAM visual odometry is proposed. Based on the traditional visual odometer implementation scheme, the ORB feature extraction algorithm is used to extract the features of the image and calculate the descriptor to match the features of the map points in the local map. Finally, the PnP algorithm is used to calculate the camera pose. In order to ensure the accuracy of the tracking, it is proposed to use the triangulation algorithm to update the depth of the map points in the local map after calculating the camera pose. The experiment uses fr1 series data set in tum database to test. The experimental results show that the scheme can reduce the root-mean-square error in the tracking process by 9.21% on average while ensuring real-time performance. The image quality of the point cloud map generated is also improved by 11.21%.
Keywords:RGB-D SLAM; ORB feature extraction; PnP algorithm; triangulation algorithm; local map
0 引 言
随着人工智能的到来,近年来视觉同步定位与地图构建(Simulation Localization and Mapping, SLAM)技术在现实生活中被广泛应用,如扫地机器人,无人驾驶,VR虚拟现实等。视觉SLAM是指以搭载相机为传感器主体,在没有任何环境先验信息的情况下,在运动过程中建立环境模型,同时估计自己的运动。根据主传感器的不同,视觉SLAM主要分为三类,分别为Monocular SLAM(单目SLAM)[1]、Stereo SLAM(双目SLAM)、以及RGB-D SLAM(深度相机SLAM)[2],其中Monocular SLAM目前已实现的方案主要有MonoSLAM、PTAM(parallel tracking and mapping)等,Stereo SLAM主要的實现方案目前较少只有RTAB-MAP(real time appearance-based mapping)方法,而RGB-D SLAM的应用较广,主要的实现方案有DVO (dense visual odometry)、RTAB Map、ORB-SLAM2等。RGB-D SLAM 是指把深度相机作为主传感器进行信息获取,深度相机造价低,且具有可以同时获取彩色图和深度图的优点,促使更多的学者把RGB-D相机数据作为研究视觉SLAM的传感器输入数据。
siui=Kexp(ζΛ)Pi(2)
现实情况下因为相机位姿未知以及观测点噪声的原因,所以该等式存在误差,因此我们把误差项求和,构造最小二乘问题,同时找到相机位姿的最优解,使得误差最小化,最小二乘公式如下:
ζ*=argmin12∑ni=1ui-1siKexp(ζΛ)Pi22(3)
式(3)是指真实像素点的位置与空间3D点根据当前初始位姿投影到像素平面的像素点位置之间的误差。为求解式(3),使用李代数构建无约束的优化问题,并通过高斯牛顿优化算法进行求解,首先对该问题进行线性化:
e(X+Δx)≈e(X)+JΔx(4)
式中:e为像素坐标误差(2维);X为相机位姿(6维);J是一个2×6的雅克比矩阵,描述了相机误差对相机位姿的一阶变换关系,用李代数的扰动模型进行求解J:
P′=(exp(ζΛ)P)1∶3=[X′,Y′,Z′]T(5)
式(5)中P′表示空间点Pi变换到相机坐标系下的坐标,上式表示取该坐标的前3维。根据相机针孔模型有:
su=KP′
susvs=fx0cx0fycy001X′Y′Z′(6)
消去s得:
u=fxX′Z′+cx,v=fyY′Z′+cy(7)
左乘扰动量并求导得:
eδζ=limδζ→0e(δζζ)δζ=eP′P′δζ(8)
式(8)中指李代数上的左乘扰动,等式右端第一项是指误差项关于投影点的导数:
eP′=-uX′uY′uZ′vX′vY′vZ′=-fxZ′0-fxX′Z′2
0fyZ′-fyY′Z′2(9)
式(8)等式右端第二项是指变换成空间坐标后对李代数的导数:
(TP)δζ=I-P′Λ0T0T(10)
取前3维得:
P′δζ=I-P′Λ(11)
将两项相乘得到了2×6的雅克比矩阵:
eδζ=-
fxZ0-fxX′Z′2-fxX′Y′Z′2fx+fxX′2Z′2-fxY′Z′
0fyZfyY′2Z′2-fy-fyY′2Z′2fyX′Y′Z′2fyX′Z′(12)
至此推导出了观测相机方程关于相机位姿的导数矩阵,为优化过程提供梯度的方向,指导优化迭代。利用高斯牛顿法优化出精度更高的相机位姿。
2 改进算法
本文采用Monocular SLAM中常用的构建局部地图的方法。使当前帧只与局部地图中的地图点进行匹配,并计算位姿,这样可 以大大减小由于相邻帧之间位姿误差的积累而产生的漂移现象。而后为减少从深度图中采集到的地图点对应的空间点深度值的误差,本文提出采用三角化算法来计算出空间点的深度值,并与采集到的空间点深度值进行加权数值融合,争取达到提高构建的局部地图质量的目的。
局部地图仅包含与当前帧有相同特征点的地图点和关键帧,所以计算量小,不会大幅度增加算法的运行时间,但是却提高了算法的精确度,同時也为后端的回环检测提供了更加精准的地图点深度的数据。
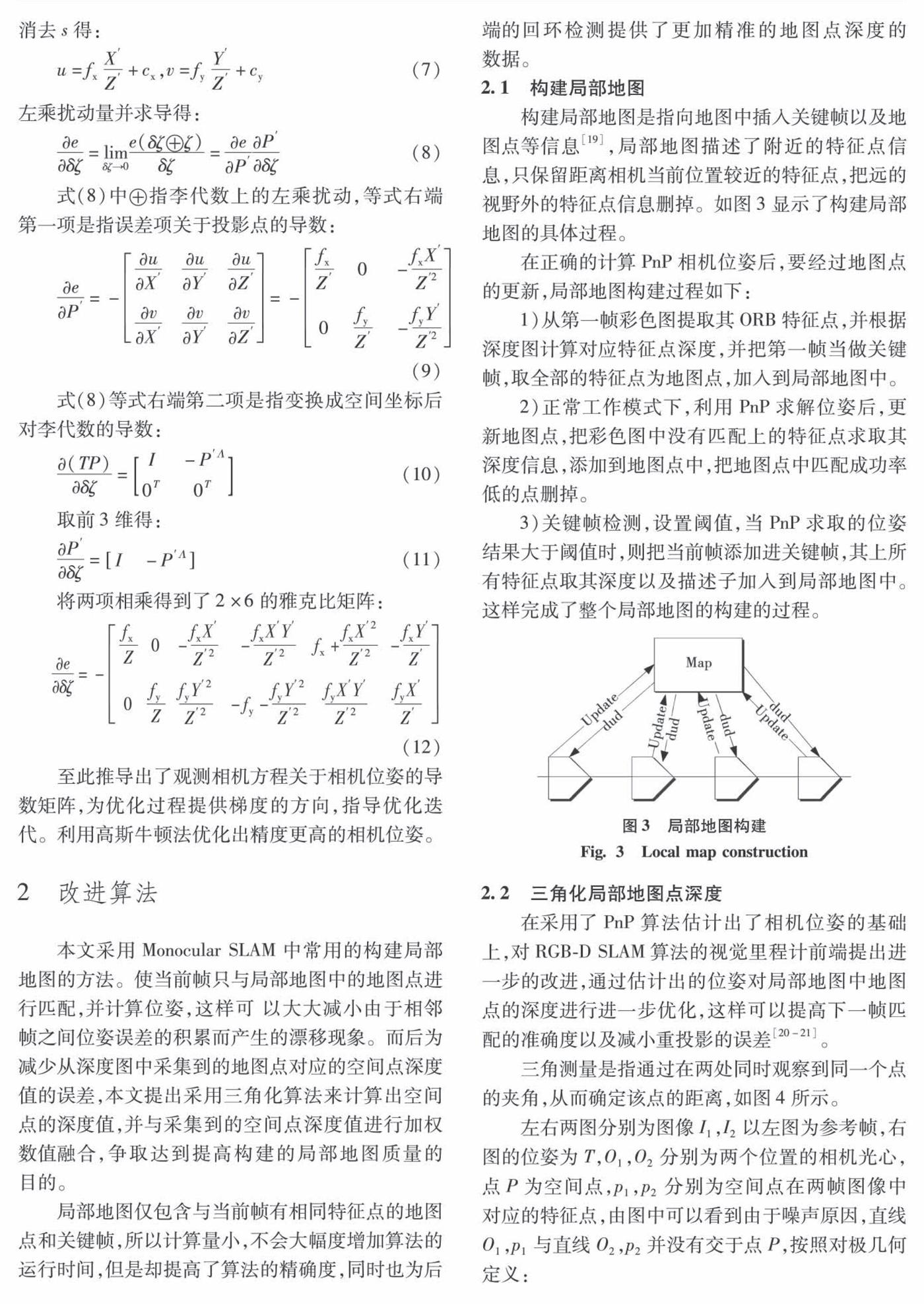
2.1 构建局部地图
构建局部地图是指向地图中插入关键帧以及地图点等信息[19],局部地图描述了附近的特征点信息,只保留距离相机当前位置较近的特征点,把远的视野外的特征点信息删掉。如图3显示了构建局部地图的具体过程。
在正确的计算PnP相机位姿后,要经过地图点的更新,局部地图构建过程如下:
1)从第一帧彩色图提取其ORB特征点,并根据深度图计算对应特征点深度,并把第一帧当做关键帧,取全部的特征点为地图点,加入到局部地图中。
2)正常工作模式下,利用PnP求解位姿后,更新地图点,把彩色图中没有匹配上的特征点求取其深度信息,添加到地图点中,把地图点中匹配成功率低的点删掉。
3)关键帧检测,设置阈值,当PnP求取的位姿结果大于阈值时,则把当前帧添加进关键帧,其上所有特征点取其深度以及描述子加入到局部地图中。这样完成了整个局部地图的构建的过程。
2.2 三角化局部地图点深度
在采用了PnP算法估计出了相机位姿的基础上,对RGB-D SLAM算法的视觉里程计前端提出进一步的改进,通过估计出的位姿对局部地图中地图点的深度进行进一步优化,这样可以提高下一帧匹配的准确度以及减小重投影的误差[20-21]。
三角测量是指通过在两处同时观察到同一个点的夹角,从而确定该点的距离,如图4所示。
左右两图分别为图像I1,I2以左图为参考帧,右图的位姿为T,O1,O2分别为两个位置的相机光心,点P为空间点,p1,p2分别为空间点在两帧图像中对应的特征点,由图中可以看到由于噪声原因,直线O1,p1与直线O2,p2并没有交于点P,按照对极几何定义:
s1x1=s2Rx2+t(13)
式中:s1,s2分别为特征点的深度;x1,x2为特征点的归一化坐标;R,t为相机位姿,上式左乘xΛ1得:
s1xΛ1x1=0=s2xΛ1Rx2+xΛ1t(14)
因为估计的相机位姿存在误差,现构建最小二乘问题求解s2,这里的优化变量为s2,即求得当s2为何值时,等式最小,最后利用式s2求得s1。
θ=argmin12∑ni=0‖s2xΛ1Rx2+xΛ1t‖22(15)
由于是前端的位姿估计,此处并没有选择计算量较大的深度滤波进行深度估计,数据融合算法采取普通的加权数据融合算法。将上一步求得的深度数据s1与从深度图中采集得到的数据融合:
s1=x+v1(16)
s0=x+v0(17)
式中s表示深度数据;v表示两深度估计值存在的随机误差,且设vi(i=0,1)为存在的误差,vi~N(0,σ2i),且两估计值分别独立。
设x的估计值与观测值s成线性关系,为x的无偏估计则:
=w1s0+w2s1(18)
式中Ω=(w1,w2)为两个估计值的权值。设估计误差=x-取代价函数为的均方误差,则:
D=E(2)=E{[x-w1(x+s0)-w2(x+s1)]2}(19)
E()=E[x-w1(x+s0)-w2(x+s1)]=0(20)
式中E(v1)=E(v2)=0,E(x)=E(),则有:
w2=1-w1(21)
则代价函数可写为
D=E(2)=
E[w21v21+(1-w1)2v22+2w1(1-w1)v1v2](22)
D=E(2)=w21σ21+(1-w1)2σ22(23)
为使J最小,求导有
DΩ=0(24)
最优权值为
w1=σ22σ22+σ21,w2=σ21σ22+σ21(25)
则最优估计量为
=σ22s0σ22+σ21+σ21s1σ22+σ21(26)
3 仿真实验结果与分析
为验证算法的有效性,本章选取TUM数据集中的fr1系列数据集进行测试,首先进行特征匹配实验,然后通过定位误差与运行速度实验和点云建图实验,对传统算法和本文算法进行评估,最后得出实验结论。
本算法的实验平台为Intel i5 6200U处理器(2.3GHz),4 GB RAM,64位Ubuntu14.04操作系统。
3.1 ORB特征匹配实验结果
特征匹配实验选取fr1/xyz中的部分数据进行实验。ORB特征匹配结果如图5、6所示,其中图5为直接匹配的结果,图6为去除误匹配之后的匹配效果。图6的特征匹配相比于图5减小了67%,也就是正确匹配率为33%。这里设置的筛选依据是,汉明距离小于最小距离的2倍。
3.2 定位误差与运行速度分析
本次选取fr1/room数据集以及fr1/xyz数据集进行测试,进行5次重复试验,在实验过程中记录算法的运行时间以便对算法的实时性进行评估,
表1、2为本文算法与其他两种相关算法的跟踪精度和运行时间的对比,均方根误差体现了数据的真实轨迹和算法跟踪的轨迹之间的误差。
从表1、2可以看出:
1)针对前两行,SIFT算法与ORB算法的比较,SIFT算法的均方根误差比ORB算法平均降低了9.962%,而对运算速度而言,ORB算法却较SIFT算法提升了90%,相较于均方根误差的变化,运算速上的差异则更加明显,由此证明本文采用的ORB特征提取算法极大提高了算法的实时性。
2)针对后两行,同样使用ORB特征提取的两个算法,本文算法相较于ORB+PnP算法,均方根误差平均降低了9.21%,而算法的运行时间却仅增加了0.002s,对于fr1这样每秒取30帧的数据集,该算法的处理帧速度可满足SLAM算法的时实同步跟踪定位的要求。
综上所述,在满足处理帧速度的条件下,本文算法减小了均方根误差,提高了跟踪的精度。
3.3 局部地图构建实验结果
同步定位与地图构建技术的建图方式有很多种,其中主流的建图方式有点云建图、八叉树建图、网格建图。点云建图是指用一组离散的点来表示的地图,其中每个点都包含x,y,z三维坐标信息。相比于点云建图,八叉树建图法以及网格建图法作为底层技术更加方便向上层应用来提供信息。但是建图结果不清晰,导致实验对比困难,所以为验证本文算法的有效性,本文采取最基本的点云建图方式进行实验对比分析。
本文的点云建图实验选取fr1系列的fr1/desk数据集以及fr1/floor数据集中的全部数据进行点云建圖,建图结果如图7~10所示。图7、8为采用fr1/desk数据集的建图结果,图9、10为采用fr1/floor数据集的建图结果。其中图7、9为前端没有三角测量的RGB-D SLAM算法生成的点云图,图8、10则为使用本文算法最后生成的点云图。获得的数据结果如表3、4所示。
如图7~10所示,图8相较于图7图像轮廓更加清晰,图像质量更好。而图10相较于图9圆圈处建图范围更广(如图中红线处圈出的地板所示)。
下面采用图像质量评判的方法对以上三组对比图进行定量分析。本文采取的图像质量评判标准分别为信息熵,亮度均值以及标准差。
1)图像信息熵通过统计每个像素点灰度值的总期望得出,信息熵值大说明该图像的轮廓更加清楚。
2)亮度均值是衡量一个图像中像素的灰度值的平均数,亮度均值大的图像说明该图像亮度越大,点云建图结果更加符合真实场景。
3)图像标准差反应一个图像高频部分的大小,标准差大的图像对比明显,图像更加清晰。
以上两组对比图像的像素分别为522×300,440×390。量化分析的实验结果如表3、4所示:
从表3、4可以看出,对于fr1/desk、fr1/floor数据集,本文算法相较于ORB+PnP算法生成点的点云图,虽然亮度均值及标准差相差无几,但是信息熵都有明显提高,分别提高了15.78%、6.64%。可见图8、10的建图结果更加清晰,图像信息含量更高。
综上所述,两种数据集的测试结果都表明,使用本文算法构建的点云地图更加清晰,本文算法确实通过三角化地图点深度提高了构建的点云地图的质量。
4 结 论
本文主要把传统的RGB-D SLAM算法的前端视觉里程计部分进行改进,在保证了算法处理帧速度的同时,在前端视觉里程计部分加入了三角测量算法来提高定位的稳定性。最后采用TUM数据集中的fr1系列数据集进行了均方根误差,运行速度以及生成点云图的实验。实验结果证明本方案在定位精度上有明显提高,其中均方根误差平均减少9.21%。改进后算法生成的点云图相较于传统算法生成的点云图信息熵提高了11.21%,可以为后端的回环检测提供良好的基础数据。
fr1数据集使用的Kinect相机的运行速度是0.41m/s,旋转速度是23.33deg/s,运行相对较慢。下一步的研究是如何在运行速度较快时实现准确的定位与建图。
参考文献:
[1] LEES H, CIVERA J. Loosely-coupled Semi-direct Monocular SLAM [J]. IEEE Robotices & Automation Letters, 2018, 4(2): 399.
[2] KERL C, STURM J, CREMERS D. Dense Visual SLAM for Rgb-d Cameras[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. USA Piscataway: IEEE, 2014: 2100.
[3] HENRY P, KRAININ M, HERBST E, et al. Rgb-d mapping: Using Depth Cameras for Dense 3D Modeling of Indoor Environments[C]//The 12th International Symposium on Experimental Robotics. 2010:22.
[4] ENDRESS F, HESS J, STURM J, et al. 3-D Mapping with an Rgb-d Camera [J]. IEEE Transactions on Robotics, 2014, 30(1): 177.
[5] ENGELHARD N, ENDRESS F, HESS J, et al. Real-time 3D Visual SLAM with a Hand-held Rgb-d Camera[C]//Proceedings of the RGB-D Workshop on 3D Perception in Robotics at the European Robotics Forum, Sweden Vasteras, 2011 : 1.
[6] KERL C, STURM J, CREMERS D. DenseVisual SLAM for Rgb-d Cameras[C]// In 2013 IEEE/RSJ Internation Conference on Intelligent Robots and Systems, 2013:2100.
[7] LABBE M, MICHAUD F. Online Global Loop Closure Detection for Large-scale Multi-session Graph-based SLAM[C]// In 2014 IEEE /RSJ International Conference on Intelligent Robots and Systems, 2014:2661.
[8] MURARTAL R, TARDOS J D. Orb-SLAM: A Versatile and Accurate Monocular SLAM System[C]//IEEE Transactions or Robotics. IEEE, 2015 : 1147.
[9] MURARTAL R, TARDOS JD. Orb-SLAM2: an Open-source SLAM System for Monocular, Stereo, and Rgb-d Cameras [J]. IEEE Transactions on Robotics, 2017, 35(5) : 1255.
[10]陳邵, 郭宇翔, 高天啸, 等. 移动机器人RGB-D视觉SLAM算法[J].农业机械学报, 2018, 49(10) : 38.
CHEN Shao, GUO Yuxiang, GAO Tianxiao, et al. Rgb-d Visual SLAM Algorithm for Mobile Robots [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(10): 38.
[11]李戈星, 刘士荣, 仲朝亮, 等. 基于改进关键帧选择的RGB-D SLAM算法[J].大连理工大学学报, 2017,57(4): 411.
LI Yixing, LIU Shirong, ZHONG Chaoliang, et al. Rgb-d SLAM Algorithm Based on Improved Key-frame Selection [J]. Journal of Dalian University of Technology,2017,57(4): 411.
[12]HENRY P, KRAININ M, HERBST E, et al. Rgb-d Mapping: Using Kinect-style Depth Cameras for Dense 3D Modeling of Indoor Environments [J]. International Journal of Robotics Research, 2012, 31(5): 647.
[13]丁文东, 徐德, 刘希龙, 等. 移动机器人视觉里程计综述[J]. 自动化学报, 2018, 44(3) :385.
DING Wendong, XU De, LIU Xilong, et al. Review on Visual Odometry for Mobile Robots [J]. Acta Automatica Sinica, 2018, 44(3): 385.
[14]龚学锐, 闵华松. 基于ROS的惯性和视觉里程计的机器人室内定位[J]. 组合机床与自动化加工技术, 2019, 5(5) :106.
GONG Xuerui, MIN Huasong. Indoor Positioning by Visual-odometry Based on Ros [J]. Modular Machine Tool & Automatic Manufacturing Technique,2019,5(5):106.
[15]张震, 郑宏. 一种结合ORB特征和视觉词典的RGB-D SLAM算法[J].计算机工程与应用, 2018, 54(12): 170.
ZHANG Zhen, ZHENG Hong.Rgb-d SLAM Algorithm based on Orb Features and Visual Dictionary [J], Computer Engineering and Applications, 2018, 54(12):170.
[16]LEPETIT V, MORENO F, FUA P, et al. Epnp: an Accurate o(n) Solution to the PnP Problem [J]. International Journal of Computer Vision, 2008, 81(2):155.
[17]RUBLEE E, RABAUD V, KONOLIGE K, et al. Orb: an Efficient Alternative to Sift or Surf[C]//International Conference on Computer Vision, 2011: 2564.
[18]董靜薇, 赵春丽, 海博. 融合同态滤波和小波变换的图像去雾算法研究[J]. 哈尔滨理工大学学报, 2019, 24(1):66.
DONG Jingwei, ZHAO Chunli, HAI Bo. Research on Image De-fog Algorithm based on Fusion Homomorphic Filtering and Wavelet Transform. Journal of Harbin University of Science and Technology, 2019, 24(1):66.
[19]刘志斌, 吴显亮, 徐文丽, 等. 视觉SLAM中的基于误匹配风险预测的特征选择[J].机器人, 2010,32(5): 635.
LIU Zhibin, WU Xianliang, XU Wenli, et al. Erroneous Matching Risk Prediction based Feature Selection for Visual SLAM [J]. Robot, 2010, 32(5):635.
[20]PRAKHYA SM, LIU B, LIN W, et al. Sparse Depth Odometry: 3D Keypoint based Pose Estimation from Dense Depth Data[C]//IEEE International Conference on Robotices and Automation, 2015: 4216.
[21]彭清漪, 夏林元, 吴东金. 基于光度与点线特征融合的半直接单目视觉定位算法[J]. 传感器与微系统, 2020, 39(4):110.
PENG Qingyi, XIA Linyuan, WU Dongjin. Semi-direct Monocular Visual Localization Algorithm based on Photometry and Point/line Feature Fusion [J]. Transducer and Microsystem Technologies, 2020, 39(4) :110.
[22]方正, 赵世博, 李昊来. 一种融合稀疏几何特征与深度流的深度视觉SLAM算法[J]. 机器人, 2019, 41(2) : 185.
FANG Zheng, ZHAO Shibo, LI Haolai. A Depth Vision SLAM Algorithm Combining Sparse Geometric Features with Range Flow [J]. Robot, 2019, 41(2) :185.
(编辑:温泽宇)
收稿日期: 2015-05-31
基金项目: 国家自然科学基金(61601149);黑龙江省自然科学基金(QC2017074).
作者简介:
董静薇(1972—),女,教授,硕士研究生导师;
韩知雨(1994—),男,硕士研究生.
通信作者:
蒋燚铭(1994—),女,硕士研究生,E-mail:2585098146@qq.com.