无线传感网络时间同步方案研究
2015-03-11ResearchontheTimeSynchronizationSchemeforWirelessSensorNetwork
Research on the Time Synchronization Scheme for Wireless Sensor Network
李 源 刘孝先 徐郭建 崔燕明 陈建明
(国网重庆市电力公司信息通信分公司,重庆 400014)
无线传感网络时间同步方案研究
Research on the Time Synchronization Scheme for Wireless Sensor Network
李源刘孝先徐郭建崔燕明陈建明
(国网重庆市电力公司信息通信分公司,重庆400014)
摘要:针对无线传感器网络(WSNs)对时钟准确性和精确性(精准性)的严格要求,提出了可应用于持续负荷的无线传感网络的功率警醒时间同步协议(发送-接收的类型)。在该方案中,可忽略数据传输过程中的大部分非确定时间延迟,并综合考虑传感器节点(SN)的可靠与不可靠数据传输。应用结果验证了时间同步(微秒级)的准确性和电传感器节点电池的节能性,表明了所提协议的可用性。
关键词:无线传感器网络(WSN)传感器节点时间同步时间延迟路由协议
Abstract:In accordance with the strict requirements on accuracy and precision of clock for wireless sensor network (WSN), the power aware time synchronization protocol (send-receive type) which can be used in continuous loaded WSN is proposed. In this scheme, most non-determined time delay in data transmission can be ignored, and the reliable and unreliable data transmission of the sensor nodes can be comprehensively considered. The application results verify the accuracy of time synchronization and energy saving of the battery powered sensor nodes;this indicates that the protocol given is feasible.
Keywords:Wireless sensor network(WSN)Sensor nodeTime synchronizationTime delayRouting protocol
0引言
无线传感器网络由大量带有放射装置的传感器节点相互协作构成,可布置于任何实际环境中,广泛应用于环境监测、安保、运输和医疗等行业中[1]。由于无线传感器网络的使用基于数据的到达时间,因此需要确定事件准确发生的时间。同步网络时间对于无线传感器网络的能效规划和电力管理也极为重要。
大多无线传感器时间同步方法集中于获得整体网络的高同步准确性,而未考虑电能的消耗[2-3]。其他方式通过降低同步复杂性或者增加同步时间来提高电效率[4-5]。近期,也有一些无线传感器的同步技术,它们的共同目标是在实际网络同步状态的基础上,通过尽可能地减少同步事件来节省电能[6]。当前的时间同步协议[7],并不直接考虑无线传感器网络接收和发送数据时程序执行产生的延迟。这种延迟可能恰好是几毫秒[8],因此不可以忽略,需要根据传感器节点的CPU时钟频率来调整。
本文在充分研究了现有时间同步协议的基础上,提出了一种可靠的电力提醒时间同步协议,并验证了其可行性。
1时钟模型
传感器节点由两种不同的时钟振荡器驱动,分别为系统时钟振荡器和局部时钟振荡器,局部时钟振荡器没有中断。为了提供维持正确时间(局部时间戳)的信号,局部时钟振荡器可生成不同的时间单元。传感器节点使用两个局部时钟振荡器,这是因为局部时钟振荡器可持续运行,系统时钟振荡器则相反,它会降低或停止CPU进入节能模式,导致时间信息的丢失。因此,不能只使用系统时钟振荡器保持时间[9]。
大部分计算机振荡器没有稳定准确的频率,所以它们不能生成准确的时间间隔。由于生产技术、环境温度、压力、电池电压、振荡器老化和其他影响,晶体振荡器的运行略有不同。晶体振荡器精度范围从1×10-6~50×10-6。这意味着某晶体振荡器的标准频率只有1 MHz,两个传感器节点时差可能为1~50 μs,甚至很小的频率偏移也会带来0.864~4.32 s的不确定性[10]。
1.1 局部时钟振荡器模型

由于时钟的不准确性,其工作范围为:
1-ρ≤∂C/∂t≤1+ρ
(1)
式中:ρ为制造商提供的最大斜率。
快、慢时钟以及合适的时钟[6]如图1所示。其中tSN为无线传感器网络中的节点时间,t为普遍时间日历。

图1 快、慢时钟以及合适的时钟
由此可知,局部时钟差∂C和实际时差∂t可以由以下区间分界:

(2)
1.2 时钟电路
电路生成时钟信号的基本框图如图2所示。它包括两部分:①局部时钟振荡器,作为独立单元;②时间端口和C_Timer,作为传感器节点的计算子系统组件。局部振荡器由感通元件、时钟驱动程序和硬件计数器组成。计算机子系统经由时间端口接收硬件计数器。软件可以使用这个值来设置初始时间戳值。在发送和接收数据包期间,C_Timer用于高分辨率时间测定。

图2 时钟电路及其相关时间器硬件的基本框图
此方法中,局部时钟振荡器会在CPU和其他外部电源关闭时继续运行。在接收传感器节点开启状态时,C_Timer的当前值用来更新局部时间戳值。
1.3 时间同步的要求
无线传感器网络中的定位同步原因有几点。第一,传感器节点需要协作运行,以完成复杂的感知功能。第二,采用同步手段旨在增加生命周期。无线传感器网络中的许多程序在时间上耦合,意味着所有传感器节点中的时间戳是相同的,为此需增强时间同步协议。传感器节点在传感器网络中通过数据包交换,允许一个传感器节点相对于其他节点进行时间估计。同步可以是总体或局部,总体同步时所有传感器节点从单一来源同步,而局部同步仅需要邻近传感器对同步。
现在假设无线传感器网络由主传感器节点和从传感器节点对构成,通过从主向从发送数据包实现时间同步。来自主传感器节点的时钟信号,在不同的局部时间到达不同的传感器节点,无线传感器网络中的时钟倾斜是传感器节点时间同步运行的结果。时钟倾斜是许多不同限制因素引起的。这些因素可以分为:①物理因素,如无线连接长度、跳跃次数、数据传输率、传输密度;②硬件,使用传感器节点的类型、运行速率;③软件,时间同步协议、考虑到达同步数据包时间的反应时间延迟。上述限制因素中部分可作为确定性特征(无线连接长度、运行速率、时间同步协议等),其他因素可作为不确定特征(传输密度、时间-时间同步数据包反应延迟)。
设计时间同步协议的主要目标是使式(2)定义的时间间隔尽可能小,即接近于零,可以通过以下两种方法实现。
① 使用稳定的时间同步时钟振荡器(更高的成本和电耗)。
② 所有时间不确定性因素都可以消除或预测至合适的精度,而时间确定因素可以预测,在时间戳过程中也可以考虑。由于其较低的成本和电耗,本文选用此方法。
2工作周期操作模式
2.1 局部时钟振荡器和T_timer的功能
本文中,局部时钟振荡器用于确定循环周期和创建局部时间戳。为了提高时间分辨率测量和间接降低同步误差,当CPU进入到主动模式时,所有时间延迟由局部系统时钟振荡器定义的分辨率衡量,即计算子系统中安装的C_Timer(如图2所示)。
2.2 工作周期定义
完整的时间同步段示意图如图3所示。

图3 完整的时间同步段
节点的电波开启或关闭的时间段分别定义为活跃(TON)和休眠期(TOFF)。期间,活动和非活动时期指的是一个节点的广播打开和关闭的时间段。总同步时间TΣ为:
TΣ=TOFF+TON
(3)
传感器节点电波开启的时间与完整时间同步段的商即工作周期,定义为:
(4)
式中:Tproc为发送信号、数据处理和数据传递所需的过程时间;Tguard为保护时间。
频率变化导致传感器节点间的相对时钟发生偏移。所以,传感器节点必须包括保护时间。保护时间等于最大偏移量,与TΣ线性相关。令sskew=Δf/f为频率变化,TΣ与总时间同步段相关,则保护时间的最小值为Tguard=2TΣsskew。活跃段不重叠的节点不能互相通信。
3时间延迟部件
传统的时间同步协议需要鉴别出同步期间误差产生的主要时间延迟部件。首先,时钟会根据环境因素变化延迟,如电补给、湿度和温度。这些会影响无线传感器网络中的准确时间同步。这些影响的误差值取决于时间同步段。当时间同步段小于1 s时,误差范围为纳秒级;当时间同步段较大(如>24 h)时,误差范围为毫秒级。根据量级,假设误差较小。本文选取数据包进行传输通信,如图4所示。

图4 数据包传输示意图
由图4可知,协议的信息传送由6个时间延迟成分组成:取得延迟(TF)、媒质通道延迟(TMA)、传递延迟(TT)、发射传播延迟(TP)、接收延迟(TRP)和处理延迟(TPD)。这些组成成分中有一些是确定的,一些是不确定的。不确定的时间传递延迟是由准确的时间同步决定的,因为它们会使接收器很难估计数据包发送和接收的时间。
4电力提醒的时间接收协议
4.1 数据包结构
数据包结构如图5所示,包括序文、合成器、长度、地址、数据和CRC字段。

图5 数据格式
4.2 延迟补偿
时钟模型和时间延迟对于电力提醒时间同步协议运行的影响分析如下:①在时间戳制造和更新的过程上,可以绕开不确定性的延迟;②要考虑确定性延迟,采用的方法为随时间分辨率的持续,预先估计延迟。
4.3 时间戳格式的定义
时间戳执行为n级计数器。计数器会在局部时间振荡器产生单位时间持续脉冲时计数。在传感器节点中,时间戳及其时钟一般基于32 768 Hz晶体。此晶体具有良好的短期稳定性但不支持高分辨率,因为它有30.5 μs的小幅段。
根据应用情况,时间戳分辨率可以用时间单位(秒、毫秒或微秒)表示。在本文安全中,时间戳结构由4 B组成,其格式如图6所示。

图6 时间戳格式
时间戳由以下条件定义:①Micro-5字节保留为微秒分辨率(案例中一步长为30.5 μs);②Mili-10字节为毫秒级;③Sec-6字节为秒级;④Min-6字节为分钟级;⑤Hour-5字节为小时级。
4.4 确定性时间延迟值
此部分分析如何估计确定的时间延迟TF1、TP的影响。TRP、TF1为包含在传递器中的时间延迟。它包括从时间戳开始,读到其传至RF缓冲区的延迟。TF1为几个时钟回路的序列(这里为CPU时钟回路)。TF1的一个修正值包括在传递器的时间戳内。
在无线传感器网络中,传感器节点间的距离较短,范围从几十到几百米。发射信号传播速度为300 m/μs,时间延迟小于1 μs。在本方案中,采用32 kHz的局部时钟振荡器,并用30.5 μs的时间分辨率操纵,可以保证较低的时间不确定性。
现在主要的目标为用最小的误差估计时间延迟TPD。为进行修正估计,需要知道CPU的时钟频率,以及为局部时间更新制造程序的大小。
根据CRC检查和局部时间戳更新的程序大小估计TPD。程序大小由系统时钟振荡器回路数表示。
综上所述,总确定时间延迟等于:
TDE=TF1+TRP+TPD
(5)
对于64位数据包大小,可以确定发送和接收程序列的时钟回路个数。
当系统时钟振荡器频率从1 MHz变化至32 MHz,数据传递速度范围从50 kbit/s至720 kbit/s时,每个传递64位数据包的确定性时间延迟如表1所示。表1中,“*”表示CPU在程序列中为接收数据包所消耗的时间延迟,大于传送数据所需时间。

表1 64位数据包时间延迟
图7(a)和图7(b)分别展示了系统时钟振荡器频率为64位数据包和128 kbit/s传递速度条件下的总延迟量。由图7可知,①存在两种运行区域,高依赖区域和低依赖区域。高依赖区域是系统时钟振荡频率<2 MHz的典型,而低依赖区域为系统时钟振荡器频率>2 MHz。②对于给定的数据传递速度,当系统时钟振荡器频率>2 MHz时,时间延迟达到渐近值。此时系统时钟振荡器临界频率近似为2 MHz。③当系统时钟振荡器频率<1 MHz时,时间延迟以指数形式增加。④当数据包容量增加时时间延迟也增加,而提高数据传输速度会降低延迟。⑤一般低依赖区域更适合时间同步。
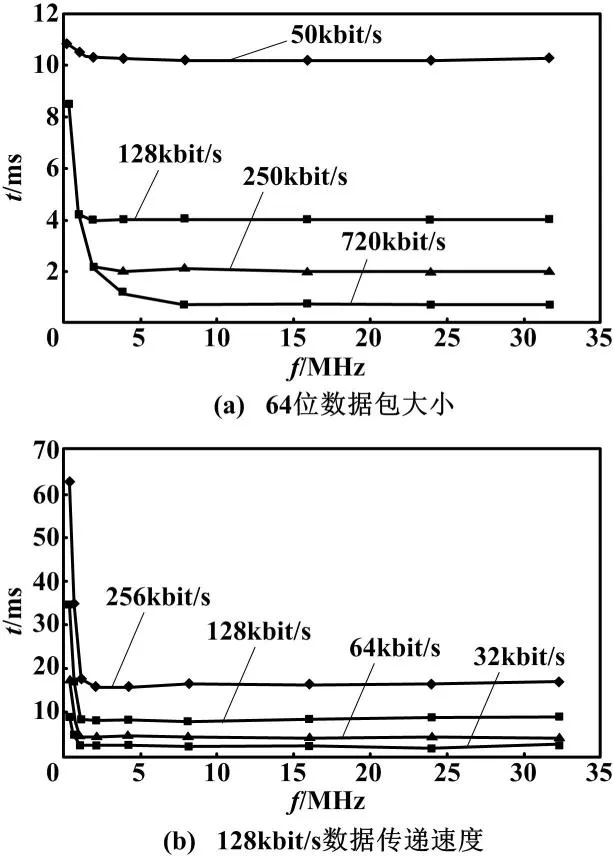
图7 考虑系统时钟振荡器频率的总时间延迟
4.5 总时间误差估计的建议
对如何评估所提方法的总时间误差,建议如下。
① 收到数据包后迅速发送数据和更新时间戳期间,通过制造时间戳避开主要不确定性时间延迟(TF和TMA)的影响。
② 根据程序结构,相对准确地计算所有确定性时间延迟,并将它们作为时间戳制造和更新期间的时间修正因素。
③ 部分不确定性时间延迟很难准确预测。这些延迟一般出现在CPU等待执行中断程序时,或者是CPU与射频调制器之间通信的异步运行。
④ 不同系统时钟振荡器频率条件下的总误差如表2所示。表2中,ρTR指发射器和接收器的系统时钟振荡器之间的偏移。由表2可知,总时间同步误差在毫秒范围内,它的绝对值随着系统时钟振荡器频率的升高而降低。

表2 不同系统时钟振荡器频率条件下的总误差
5结束语
在无线传感器应用中,时间同步为所有传感器节点提供了相同的运行时间容量,现今很多不同的时间同步方法已经投入应用。本文提出了一种电力提醒的时间同步协议,属于单通道传播,实现简单,只需要传感器节点同步所用的单数据包传输器,所需资源少。此外,它避开了时间戳制造和更新时的主要非确定性时间延迟,可以获得时间同步相对准确的时间情况。
参考文献
[1] Yick J,Mukherjee B,Ghosal D.Wireless sensor networks survey[J].Computer Networks,2008,52(12):2292-2330.
[2] 杨朔,李长庚.无线传感器网络泛洪时间同步协议安全算法[J].传感器与微系统,2014(1):137-140.
[3] Sundararaman B,Buy U,Kshemkalyani A.Clock synchronization for wireless sensor networks:a survey[J].Ad Hoc Networks,2006,3(3):281-323.
[4] 陈珍萍,黄友锐,唐超礼,等.无线传感器网络能量有效精度可控时间同步[J].电子测量与仪器学报,2014(6):597-603.
[5] 诸军,马娜,吴波,等.基于层次结构的无线传感器网络时间同步研究[J].电气自动化,2014(5):33-34.
[6] Wu Y C,Chaudhari Q,Serpedin E.Clock synchronization of wireless sensor networks[J].IEEE Signal Process Mag,2011,28(1):124-138.
[7] Rahamatkar S,Agarwal A,Kumar N.Analysis and comparative study of clock synchronization schemes in WSN[J].International Journal of Computer Science Engineering,2010,2(3):536-41.
[8] 王建平,孔德川,陈伟.一种基于多普勒效应的水下无线传感器网络时间同步机制[J].传感技术学报,2014(5):680-686.
[9] Schmid T,Shea R,Charbiwala Z,et al.On the interaction of clocks,power,and synchronization in duty-cycled embedded sensor nodes[J].ACM Transactions on Sensor Networks,2010,7(3):1-19.
[10]Williams S,Frampton K,Amundson I,et al.Decentralized acoustic source localization in a distributed sensor network[J].Applied Acoustics,2006,67(10):996-1008.
中图分类号:TH89;TP29
文献标志码:A
DOI:10.16086/j.cnki.issn1000-0380.201508012
修改稿收到日期:2015-02-02。
第一作者李源(1984-),女,2009年毕业于成都理工大学信号与信息处理专业,获硕士学位,工程师;主要从事电力系统通信技术研究。
