人形机器人技术在孤独症儿童干预中的应用
2015-03-04陈东帆李睿强韩琨
陈东帆,李睿强,韩琨
人形机器人技术在孤独症儿童干预中的应用
陈东帆,李睿强,韩琨
[摘要]目的探讨人形机器人对孤独症儿童社会交往能力、专注力以及行为能力的改善情况。方法通过机器人参与的教学情境教学,诱导10名孤独症儿童与人形机器人NAO互动。观察孤独症儿童在眼神注视、社会交往以及学习任务完成方面的表现。
结果10名儿童在有机器人参与的教学中,眼睛注视次数更多,安静时间显著增加。9人“注视”行为实际互动次数达到实验理论互动次数的50%以上,行为准确率达到80%;5人“挥手”行为实际互动次数达到实验理论互动次数的50%以上,7人行为准确率达到50%;7人“说你好”行为互动次数达到实验理论互动次数的50%以上,4人行为准确率超过50%。结论机器人有助于改善孤独症儿童的社交能力、专注力与行为能力。
[关键词]孤独症谱系障碍;儿童;人形机器人;应用行为分析;课程实验设计
[本文著录格式]陈东帆,李睿强,韩琨.人形机器人技术在孤独症儿童干预中的应用[J].中国康复理论与实践, 2015, 21(11): 1325-1328.
CITED AS: Chen DF, Li RQ, Han K. Application of humanoid robot in intervention for autistic children [J]. Zhongguo Kangfu Lilun Yu Shijian, 2015, 21(11): 1325-1328.
孤独症谱系障碍(autism spectrum disorders, ASD)是一种广泛发展障碍,以社会交往障碍、言语和非言语交流缺陷、兴趣狭窄和行为刻板等为主要临床特征。全球现有孤独症患者3500万,其中40%是儿童,中国孤独症患儿数达100多万。开发适应孤独症患儿的训练教程非常必要。大量研究表明,孤独症患者年龄越小,越早进行干预训练,障碍行为就越容易改善[1-3]。
20世纪40年代,美国儿童精神科专家Leo Kanner教授首次对11例孤独症儿童的临床特征进行详细描述,提出“早期婴儿孤独症”这一概念。1981年,英国精神科医师Lorna Wing提出了“Asperger症候群”概念,将其归入ASD。美国精神医学会在最新拟定《精神疾病诊断与统计手册(第五版)》中强调ASD这一大概念,将孤独症的诊断归于精神障碍[2]。据2014年最新的孤独症发病率统计数据显示,孤独症(谱系)儿童的发病率高达1∶68,作为一种广泛性发育障碍,其发病率已高居儿童精神疾病之首,且无治疗孤独症的特效药物,只能通过行为训练方式进行干预性治疗,以减轻其症状。
应用行为分析(Applied Behavior Analysis,ABA)是指人们在尝试理解、解释、描述和预测行为的基础上,运用行为改变的原理和方法对孤独症儿童进行行为干预,使其具有一定社会意义[4]。应用行为分析的基本原理就是刺激—反应—强化,治疗者对患儿进行一种或多种刺激,患儿根据刺激做出一定的反应,治疗者对患儿的正确反应提供强化物加以鼓励,对其不当行为则不提供强化物;另外教授恰当行为以替代问题行为。
应用行为训练采用一对一的回合式教学法(discretetrial instruction)。它有4个要点[4-7]:①将每项要教的技能内容分解细分,然后分步练习;②强化性教学,反复训练各个步骤;③使用提示帮助孩子做出正确的反应;④合理使用强化物。其中,内容分解与强化教学是成功的关键因素。
近年来,帮助孤独症儿童改善症状的技术层出不穷,包括静态图片、电脑动画、感统训练等[1]。一般的图卡、影像、电脑动画等方法较为单调而且缺乏反馈回应[2]。而机器人有动作与声音,能吸引孤独症儿童的注意,可能帮助孤独症儿童学习社交技巧。
NAO机器人是由法国Aldebaran Robotics公司研制的一款人工智能仿人机器人,有着讨人喜欢的外形设计和优良的硬件配置,并提供丰富的二次开发接口,可以支持多平台和多种开发语言编程。NAO机器人不仅运用在机器人研究、人工智能和计算机科学领域,还可以运用在社会学和医疗保健领域,包括多智能体系统、自动化、信号处理、全身运动、路径规划,以及孤独症治疗。
NAO机器人拥有一个开放的编程构架,提供NAO控制所需的所有应用程序编程接口(application programming interface, API),包括OpenCV的库函数以及多种成熟的算法,可以在Windows、Linux、MacOS等多种平台上编程[8-12]。
由于孤独症儿童害怕与人沟通,或无法在短时间内理解一般人的说话,他们往往觉得机器人更有安全感[13],因此在治疗中使用机器人,能促进患儿的干预训练过程,促进患儿注意力集中,激发患儿参与的兴趣[14-17],引导他们产生更多语言和动作上的互动,使训练教学设计更具吸引力和趣味性。比单纯由康复师进行训练起到的效果要明显。
目前孤独症康复干预训练过程中,专业康复师数量不足的问题已日益凸显。将机器人技术应用于孤独症儿童的干预训练,不仅可以提高康复训练的效率和成果,而且还能解决康复专业人才紧缺的问题。
本文提出一种借助机器人的干预训练方法,将人形机器人融入孤独症儿童的康复训练,设计以人形机器人NAO为示范样本的教学情境互动内容,诱导孤独症儿童与机器人互动,帮助孤独症儿童从互动过程中学习社交技巧,培养孤独症儿童的模仿能力,并加强孤独症儿童与人之间的互动。
1 资料与方法
1.1一般资料
选取10名来自上海某康复机构的孤独症儿童。纳入标准:①确诊为孤独症;②无听觉、视觉障碍;③眼睛无异常;④无自残、攻击性行为;⑤年龄8~14岁。
1.2方法
本研究分为两个阶段。
1.2.1实验(一)
包括机器人自我介绍、机器人跳舞和机器人与康复师互动3个模块。
观察儿童接触机器人时的最初反应,比较孤独症儿童在有无机器人参与教学过程时眼睛注视次数和安静时间。眼睛注视次数,无机器人环节统计孤独症儿童注视老师的次数,有机器人的环节统计孤独症儿童注视机器人的次数;安静时间,分别统计孤独症儿童处于安静状态的时间。
1.2.2实验(二)
了解儿童基本情况;结合他们在实验(一)中的表现,了解每名儿童的能力水平;结合ABA工作标准,总结提炼与每名儿童相适应的动作目标。
对应动作目标,研发编制机器人NAO应用程序,生成驱动函数,使NAO机器人做出动作;从动作目标出发,拓展社会性场景,其中包含详细的情节脚本来体现这些动作目标。
最终设计出“上学路上打招呼”教案,用于能力较高的孤独症儿童。
我们从行为目标和结果目标两方面对孤独症儿童教学效果进行主观评价。行为目标评价主要统计孤独症儿童在实验教学中的行为配合次数;结果目标评价计算孤独症儿童在实验教学中行为的准确率(正确互动次数占实际互动次数的百分比),遴选出完成水平较高的行为配合次数。
1.2.3实验布局
实验在专门布置的场所进行。孤独症儿童在机器人正前方;老师在机器人的侧面(仅在实验教学环节);在机器人左后方、右后方,各架设一台专业摄像机,用于记录孤独症儿童在实验(一)和实验(二)教学中的整个过程;电脑和操作人员在机器人的正后方。
1.2.4实验内容
由于实验对象是孤独症儿童,实验过程可能存在较多突发因素,因此实验过程中我们采用手动控制模式操控机器人,即保持电脑端连接机器人,执行预编程序。这样便于在突发状况出现时及时调整机器人的程序,尽快使实验恢复正常。
操作人员通过电脑控制NAO机器人,孤独症儿童和机器人进行互动,记录孤独症儿童与机器人互动的过程作为实验原始数据。实验结束后对孤独症儿童的行为表现进行分析。
2 结果
2.1实验(一)
10名儿童见到机器人后都表现积极,目光注视机器人,注视次数虽因人而异,长短不一,但总体都能维持较长时间注意力。基于以上反应,初步推测NAO机器人对孤独症儿童有吸引力,可以进行实验(二)。
10名儿童均在有机器人参与的教学中表现出眼睛注视次数更多,安静时间增加。见表1。
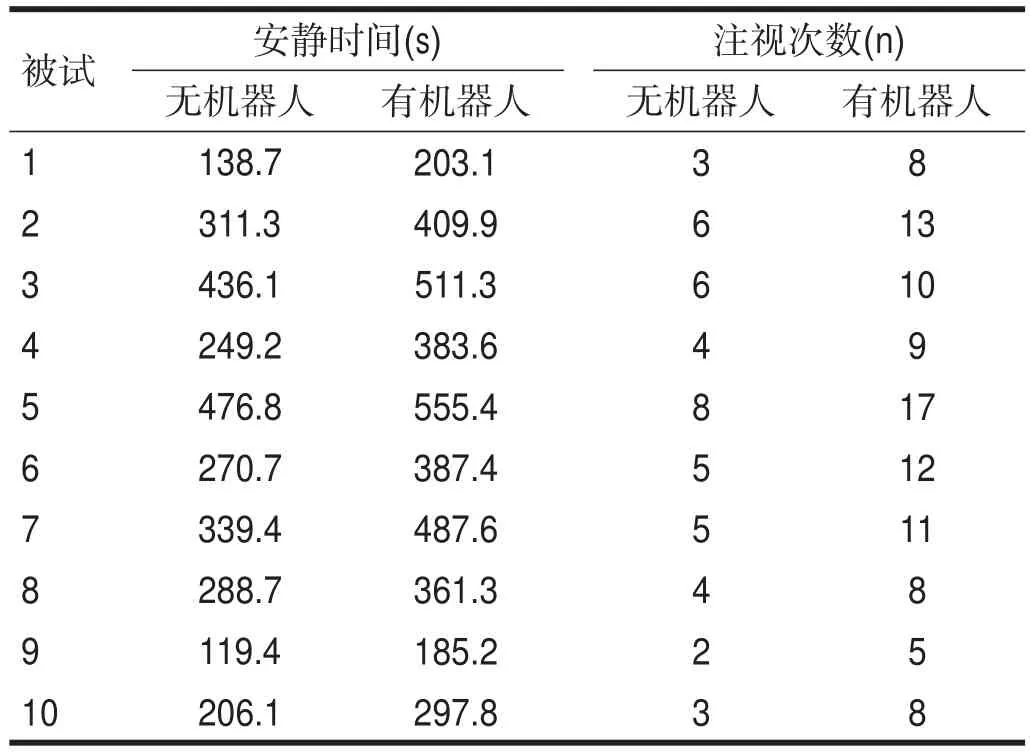
表1 孤独症儿童有无机器人环境下安静时间和注视次数比较
2.2实验(二)
2.2.1行为目标评价
“注视”行为:9人达到理论互动次数50%以上,行为准确率均达到80%。
“挥手”行为:5人达到理论互动次数50%以上,7人行为准确率达到50%。
“说你好”行为:7人达到理论互动次数50%以上,4人行为准确率超过50%。
见表2。
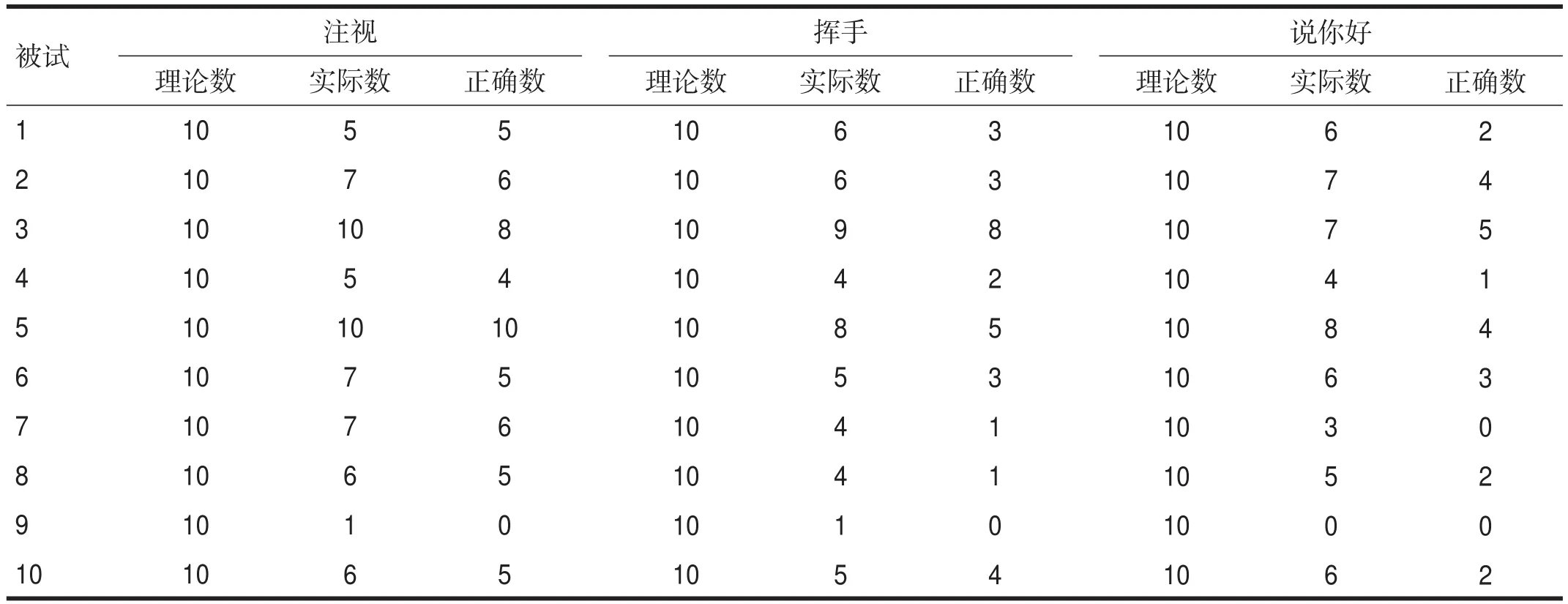
表2 孤独症儿童各行为互动次数及正确次数
2.2.2结果目标评价
通过表2数据可知,“注视”行为的准确率最高,平均达到76.9%;“挥手”次之,平均为49.6%;“说你好”最低,为35.9%。从眼神注视,到动作挥手,再到言语表达,行为难度越来越高,被试完成的准确率逐渐降低。
3 讨论
孤独症儿童的核心障碍表现为社交沟通障碍、兴趣局限及刻板行为。由于孤独症儿童个体差异大,障碍程度不同,教师资源匮乏,很难确保每名孤独症儿童均得到有效的早期干预。目前临床上关于孤独症康复训练缺乏有效的干预方法,训练模式传统、单一,无法确保孤独症儿童密集干预的强度。
2014年孤独症康复循证实践干预报告指出,以计算机为媒介的教育康复技术逐渐发展为新兴的康复模式。借助高科技手段,能够更好地将康复信息资源整合,如机器人、虚拟空间等,不仅解决教师资源匮乏的问题,同时也能保证孤独症儿童康复训练的强度和全面性,进而提高康复训练的效率。
1976年,爱丁堡大学的Weir等采用远程控制机器人对一名7岁孤独症儿童进行干预训练,取得良好效果[18,23]。近年来,国外研究者致力于利用更加灵活、智能的机器人,帮助孤独症儿童。机器人可作为ASD儿童的友好伙伴,通过对社交技能几大领域的探索,如模仿、共同注意、轮流、情绪识别和表达、主动交往等[24],发展ASD儿童的社交相关能力。
目前把机器人用于孤独症康复的模式主要有3 种[18-22]:①把机器人作为治疗同伴,通过吸引和保持儿童的注意力,使其专注于相关的交往互动;②把机器人作为社会互动的媒介,引导和促进儿童之间的社会互动行为;③把机器人作为社会代理模型,由工程师编好程序,按动不同的按钮,机器人便会为孤独症儿童展示在特定环境下的社会交往行为,使其通过观察,学习到社会交往行为;同时儿童也可以直接与机器人进行互动练习[24-25]。
本研究基于机器人技术的孤独症儿童康复训练课程开发,提出一种借助机器人的孤独症干预训练方法,将人形机器人NAO融入孤独症儿童的康复训练,设计出以人形机器人NAO为示范样本的教学情境互动内容,完成NAO机器人孤独症康复训练课程的研发、设计和初期制作,并进行多次临床实验。研究表明,机器人能提高孤独症儿童社交交往能力、专注力与行为能力。
[参考文献]
[1]樊越波.孤独症谱系障碍康复研究进展[J].中国康复理论与实践, 2012, 18(11): 1044-1046.
[2]尤娜,杨广学.自闭症诊断与干预研究综述[J].中国特殊教育, 2006, (7): 26-31.
[3]李林.儿童康复机器人及其临床应用[C].第六届全国儿童康复、第十三届全国小儿脑瘫康复学术会议暨国际学术交流会议论文汇编, 2014: 385-388.
[4]黄伟合,陈夏尧,李丹.关键性技能训练法:ABA应用于自闭症儿童教育干预的新方向[J].中国特殊教育, 2010, (10): 63-68.
[5] Peters-Scheffer N, Didden R, Korzilius H, et al. A meta-analytic study on the effectiveness of comprehensive ABA-based early intervention programs for children with autism spectrum disorders [J]. Res Autism Spectrum Disord, 2011, 5(1): 60-69.
[6]赵中.应用行为分析的维度对孤独症行为矫正的提示[J].中国儿童保健杂志, 2012, 20(1): 49-51.
[7] Cooper JO, Heron TE, Heward WL.美国展望教育中心,译.应用行为分析(第二版)[M].武汉:武汉大学出版社, 2012: 268-305.
[8]蔡自兴.机器人学[M].北京:清华大学出版社, 2009: 131-153.
[9]宁学涛,潘玉田,杨亚威,等.基于运动学和动力学的关节空间轨迹规划[J].计算机仿真, 2015, 32(2): 409-413.
[10]阮启刚,黄磊. 6R机器人轨迹规划及仿真[J].机械制造与自动化, 2011, 40(1): 168-170.
[11]李少波,赵毅夫,赵群飞,等.机器人的人体姿态动作识别与模仿算法[J].计算机工程, 2013, 39(8): 181-186.
[12]郭佳宝,杨雨洁,岳雨珊,等.机器人辅助训练改善脑卒中患者下肢功能障碍的系统评价[J].中国康复理论与实践, 2013, 19(8): 701-709.
[13] Ismail LI, Shamsudin S, Yussof H, et al. Robot-based intervention program for autistic children with humanoid robot NAO: initial response instereotypedbehavior [J]. ProcediaEng, 2012: 1441-1447.
[14] Wasielica M, Wasik M, Kasinski A, et al. Interactive programming of amechatronic system: A small humanoid robot example[C]. Advanced Intelligent Mechatronics (AIM), 2013 IEEE/ASME International Conferenceon IEEE, 2013: 459-464.
[15] Shamsuddin S, Yussof H, Ismail L, et al. Initial response of autistic children in human- robot interaction therapy with humanoid robot NAO[C]. Signal Processing and its Applications (CSPA), 2012 IEEE 8th International Colloquiumon IEEE, 2012: 188-193.
[16] Gouaillier D, Hugel V, Blazevic P, et al. Mechatronic design of NAO humanoid [C]. Proceedings- IEEE International Conference on RoboticsandAutomation, 2009: 769-774.
[17] Ismail L, Shamsuddin S, Yussof H, et al. Face detection technique of Humanoid Robot NAO for application in robotic assistive therapy[C]. Control System, Computing and Engineering (ICCSCE), 2011 IEEE International Conferenceon IEEE, 2011: 517-521.
[18]范晓壮.机器人用于自闭症谱系障碍儿童社交技能干预研究的综述[J].现代特殊教育(高教), 2015, (7): 34-37.
[19] Lund HH, Pedersen MD, Beck R. Modular robotic tiles: experiments for children with autism [J]. Artificial Life Robotics, 2009, 13(2): 394-400.
[20] Vanderborght B, Simut R, Saldien J, et al. Using thesocial robot Probo as a social story telling agent for children with ASD [J]. Interaction Studies, 2012, 13(3): 348-372.
[21] Bekele E, Crittendon JA, Swanson A, et al. Pilot clinical application of an adaptive robotic system for young children with autism [J]. Autism, 2013, 18(5): 598-608.
[22] Reichow B, Barton EE, Boyd BA, et al. Early intensivebehavioral intervention (EIBI) for young children with autism spectrum disorders (ASD) [J]. CochraneDatabaseSyst Rev, 2012, 10(10): 628-631.
[23] Cabibihan JJ, Javed H, Ang M, et al. Why robots? A survey on the roles and benefits of social robots in the therapy of children with autism[J]. Inter JSocial Robotics, 2013, 5(4): 593-618.
[24] Zheng Z, Das S, Young EM, et al. Autonomous robot-mediated imitation learning for children with autism [C]. Robotics and Automation (ICRA), 2014 IEEE International Conference on IEEE, 2014: 2707-2712
[25] Clark E, Zhou Z.Autismin China: Fromacupuncturetoappliedbehavior analysis[J]. Psychol Schools, 2005, 42(3): 285-295.
·辅助技术·
Applicationof Humanoid Robot in Interventionfor AutisticChildren
CHENDong-fan, LI Rui-qiang, HANKun
The Key Laboratory of Speech and Hearing Science, Ministry of Education, East China Normal University, Shanghai 200062, China
Abstract:Objective To investigate the effect of humanoid robot on social skills, concentration and mobility in children with autism. Methods10 autistic children wereasked to interact with humanoid robot NAO in ateaching environment that involvesactiveparticipation of the robot. The eye-contact and social interaction, as well as performances in accomplishing learning objectives were observed. Results The10 children exhibited moreconcentrated gazing and significantly longer periodsof silence. Theactual number of interaction of thebehavior Gazing of 9 children exceeded 50% of thetheoretical one, thesuccessrateof which reaching 50%. For thebehavior Waving, 5 children wereableto interact for morethan 50% of thetheoretical times, with an accuracy of performanceof 50% in 7 children. For Say Hello, 7 children wereableto interact for morethan 50% of thetheoretical times, with an accuracy of performanceof 50% in 4 children. ConclusionApplicationof humanoidrobotsNAOmay improvethesocial skills, concentrationandmobility inautisticchildren.
Keywords:autismspectrumdisorders; children; humanoidrobot NAO;Applied Behavior Analysis; experimental design
(收稿日期:2015-07-13修回日期:2015-08-28)
作者简介:作者单位:华东师范大学言语听觉科学教育部重点实验室,上海市200062。陈东帆(1964-),男,汉族,上海市人,博士,副教授,主要研究方向:计算机仿真、计算机辅助设计、机器人。
DOI:10.3969/j.issn.1006-9771.2015.11.020
[中图分类号]R749.94
[文献标识码]A
[文章编号]1006-9771(2015)11-1325-04
