大时滞对象分数阶PIλ控制
2015-02-22阮士涛郑恩让
阮士涛, 郑恩让
(陕西科技大学 电气与信息工程学院, 陕西 西安 710021)
大时滞对象分数阶PIλ控制
阮士涛, 郑恩让*
(陕西科技大学 电气与信息工程学院, 陕西 西安710021)
摘要:针对一阶大时滞对象,提出了一种分数阶PIλ控制器设计方法,利用相位裕度指标设计控制器,并通过优化分数阶次λ来增强系统对控制对象参数变化的鲁棒性.为了与常规的控制方法进行公平的比较,采用同样的相位裕度指标设计了整数阶PI控制器,并采用直接综合方法设计了Smith预估控制器.仿真结果表明,分数阶PIλ控制和Smith预估控制的鲁棒性明显优越于整数阶PI控制.
关键词:分数阶控制器; 一阶时滞对象; Smith预估控制; 鲁棒性
0引言
PID控制结构简单、鲁棒性好,在工业过程控
制领域应用最为广泛.然而随着工业的发展以及对控制系统性能和鲁棒性要求的提高,常规PID控制器由于其结构上的限制,已经很难有效应用于某些场合.
分数阶PIλDμ控制器[1]通过引入积分阶次λ和微分阶次μ实现了对常规PID控制器的一般化,它比常规PID控制器多了两个自由度,从而为系统性能和鲁棒性的进一步改善提供了可能.而根据参数λ和μ的不同取值,分数阶PIλDμ控制器又可以细分为分数阶PIλ控制器[2-7]、分数阶PDμ控制器[8,9]、分数阶IλDμ控制器[10]等多种形式.
时滞对象的分数阶控制研究是一个新的研究课题,文献[2]针对一阶时滞对象,基于相位裕度和平坦相位指标设计了分数阶PIλ控制器,使得系统对控制对象增益变化具有较强的鲁棒性.文献[3]指出,分数阶PIλ控制实际上是一种积分项加权控制.文献[4]采用增益裕度和相位裕度指标设计分数阶PIλ控制器来增强系统对时间常数变化的鲁棒性.文献[5]分析了分数阶PIλ控制系统和整数阶PID控制系统的稳定域,并说明了分数阶PIλ控制的优越性.
文献[6]通过限制灵敏度函数和互补灵敏度函数的最大值来优化系统的负载扰动抑制性能,从而得到分数阶PIλ控制器的参数,并根据相对时滞给出了积分阶次λ的经验值,该方法主要应用于过程控制领域,具有普遍的适用性.文献[7]针对一类用分数阶模型更精确描述的系统设计了分数阶PIλ控制器.目前分数阶控制已经得到了广泛的应用,如伺服系统[8,9]和农田自动灌溉系统[10]等.
然而,现有文献并没有专门考虑大时滞对象的分数阶控制[2,6],事实上,当相对时滞较小时,PID控制也能取得较好的效果.
文献[11]指出,对于大时滞对象,往往不适合对测量信号进行微分,可以采用整数阶PI控制.而分数阶PIλ控制是对整数阶PI(λ=1)控制的一般化,它比整数阶PI控制多一个自由度,因此可以进一步改善系统的性能和鲁棒性.
本文针对一阶大时滞对象,提出了一种分数阶PIλ控制器设计方法,基于相位裕度指标设计分数阶PIλ控制器,通过优化分数阶次λ来增强对控制对象参数变化的鲁棒性.并通过仿真与常规的PI控制和Smith预估控制进行了比较,说明了本文方法的优越性.
1设计指标的选择和控制器设计
假设对象的模型为

(1)
式中,K、T和L分别为对象增益、时间常数和时滞,该模型可以较精确地描述对象阶跃响应为单调变化的过程.
由于相位裕度φm可以表征期望的阻尼以及系统对时滞变化的鲁棒性,而增益穿越频率ωc可以表征期望的闭环响应速度,本文利用这两种指标来分别设计分数阶PIλ控制器和整数阶PI控制器.以C(s)表示控制器,以G(s)表示开环传递函数,具体设计指标如下:
(i)相位裕度指标
Arg[G(jωc)]=Arg[C(jωc)P(jωc)]=-π+φm
(ii)增益穿越频率
|G(jωc)|=|C(jωc)P(jωc)|=1
1.1 分数阶PIλ控制器设计
分数阶PIλ控制器的传递函数的具体形式如下:

(2)
式中,Kp、Ti和λ分别表示比例系数、积分时间和积分阶次.
根据式(1)得到对象的频率响应为

其相位和增益分别为
Arg[P(jω)]=-arctan(ωT)-Lω
(3)

(4)
根据式(2)得到控制器C1(s)的频率响应为

其相位和增益分别为
(5)
|C1(jω)|=

(6)
则开环频率响应G1(jω)的相位和增益分别为
arctan(ωT)-Lω
(7)
(8)
根据指标(i)结合式(7)可得
arg(G1(jωc))=

-π+φm
将上式化简可得

(9)
式中

根据指标(ii)结合式(8)可得
(10)
本文假设λ的取值范围为λ∈(0,2).当参数λ给定,就可以通过式(9)和式(10)分别求出参数Ti和Kp的值.
1.2 整数阶PI控制器设计
整数阶PI控制器的传递函数如下:
(11)
假设由对象P(s)和控制器C2(s)组成的开环传递函数为G2(s),即G2(s)=C2(s)P(s).为了与分数阶PIλ控制进行公平的比较,本文仍采用指标(i)和(ii)来设计整数阶PI控制器.
根据式(11)得到控制器C2(s)的频率响应为

其相位和增益分别为

(12)
(13)
则开环频率响应G2(jω)的相位和增益分别为

(14)

(15)
根据指标(i)结合式(14)可得

Lωc=-π+φm
将上式化简可得

(16)
根据指标(ii)结合式(15)可得
(17)
通过式(16)和式(17)可分别求出参数Ti和Kp的值,从而完成整数阶PI控制器参数的整定.
1.3 Smith预估器设计
文献[11]指出,对于大时滞对象,当时滞L大于时间常数T时,Smith预估控制的效果将好于整数阶PI控制,Smith预估控制的原理框图如图1所示.
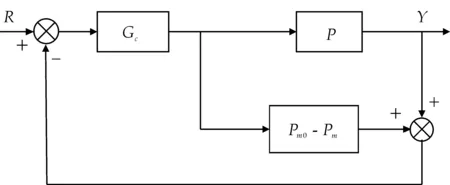
图1 Smith预估控制原理框图
图中,Gc、P、Pm和Pm0分别表示主控制器、对象、模型和模型的最小相位部分.
由图1可得
Y(s)=

当模型精确(P(s)=Pm(s))时,上式可以化简为

(18)
为了便于和整数阶PI控制以及分数阶PIλ控制进行比较,本文采用直接综合方法设计Smith预估器的主控制器.假设主控制器采用PI控制结构:

(19)
规定期望的设定值跟踪响应为

(20)
当式(18)和式(20)左右两端相等,并结合式(1)和式(19)可得
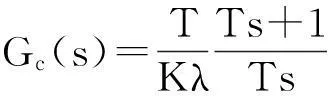
(21)
即,Kp=T/Kλ,Ti=T,可调参数λ用于折中系统性能和鲁棒性,随着λ的增大,系统的跟踪性能变慢,鲁棒性变好.
2仿真研究与分析
例1考虑以下形式的一阶大时滞对象:
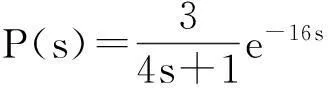
首先设计分数阶PIλ控制器,给定相位裕度φm=65 °,增益穿越频率ωc=0.025 rad/s.在(0,2)范围内选取参数λ的值,由式(9)和式(10)可知,每给定一个参数λ的值,就有一组参数值Ti和Kp与之对应.经过大量的仿真发现,当λ在1.1附近取值时,系统具有较好的性能和鲁棒性,这和文献[6]的结论是一致的.这里相对时滞τ=L/(L+T)=0.8,文献[6]指出,当τ≥0.6时,λ建议取为1.1.
在1.1附近,分别取λ=1.02,λ=1.05,λ=1.1和λ=1.15,分数阶微积分算子采用Oustaloup有理近似[12],并采用同样的指标设计整数阶PI控制器,整定参数如表1所示,当模型精确时,仿真结果如图2所示.

表1 控制器的整定参数
为了研究不同分数阶次λ对控制对象参数变化的鲁棒性,假设对象参数K、T和L同时变化+50%,仿真结果如图3所示.

图2 例1不同分数阶次的闭环标称响应

图3 例1不同分数阶次对参数变化的鲁棒性
图2表明,整数阶PI控制具有最好的标称性能,随着分数阶次λ的增加,闭环系统阶跃响应的超调量逐渐增大.图3表明,闭环系统的鲁棒性随着λ的增加而增加,整数阶PI控制鲁棒性最差.
由式(21)可知,Smith预估控制的主控制器只有一个可调参数λ,选择λ=28,以使Smith预估控制和分数阶PIλ控制(以下取λ=1.15)以及整数阶PI控制有着相近的标称响应速度,整定参数如表1所示,闭环系统的标称阶跃响应如图4所示.

图4 例1三种控制方法闭环标称响应比较
为了比较这三种控制方法的鲁棒性,假设对象参数K、T和L同时变化+50%,仿真结果如图5所示.
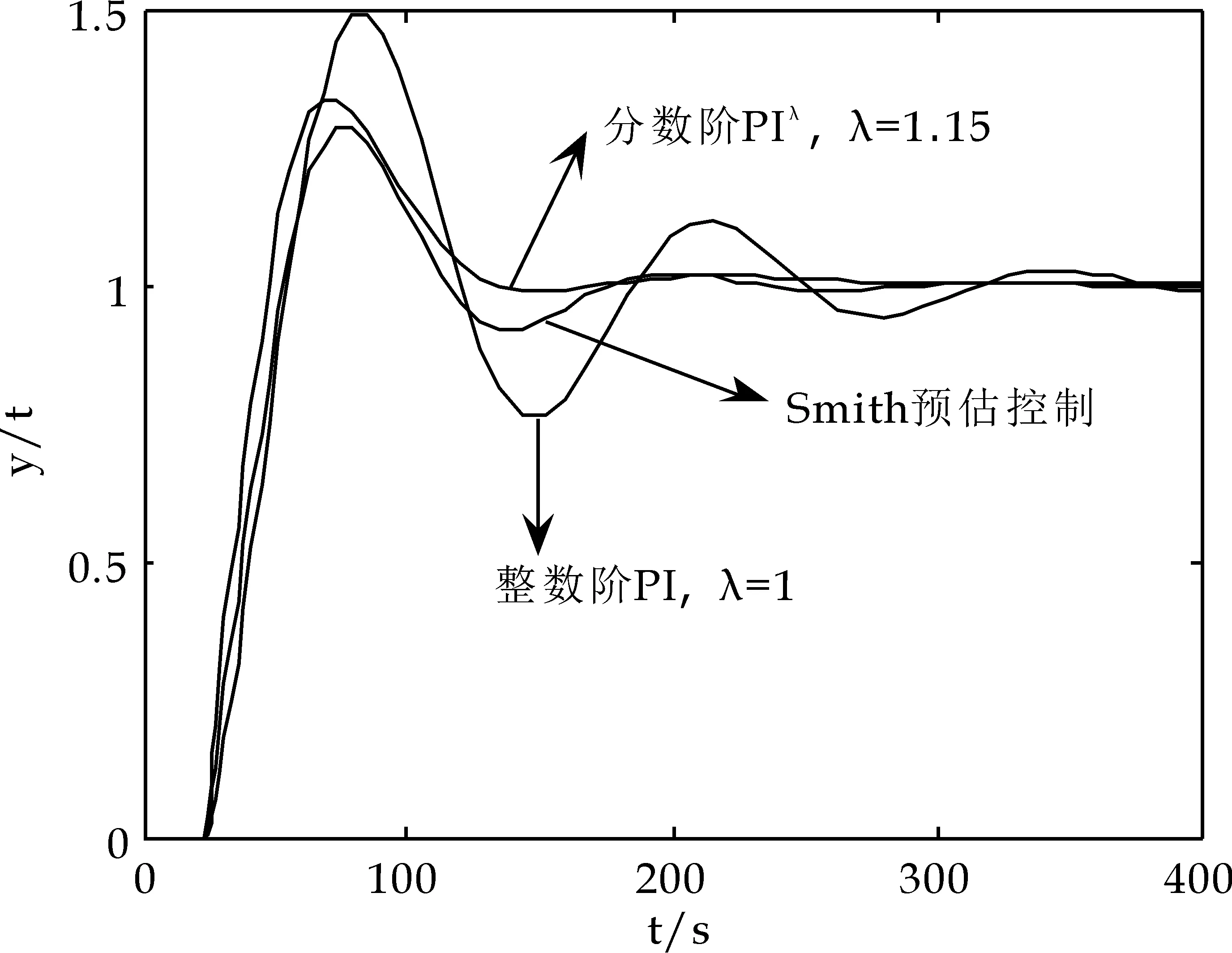
图5 例1三种控制方法对参数变化的鲁棒性
图4表明,这三种控制方法具有相近的响应速度,整数阶PI控制响应速度最快.图5表明,分数阶PIλ控制对控制对象参数变化具有最强的鲁棒性,闭环系统的阶跃响应的调节时间最短.而整数阶PI控制的鲁棒性最差.文献[11]指出,当对象参数L>T时,Smith预估控制效果好于整数阶PI控制,这和本文的结论是一致的.
例2考虑以下形式的一阶大时滞对象:

给定相位裕度φm=65 °,增益穿越频率ωc=0.02 rad/s.取λ=1.15,结合式(9)和式(10)可得Kp=0.400 9,Ti=34.793 5.采用同样的指标设计整数阶PI控制器,结合式(16)和式(17)可得Kp=0.159 0,Ti=34.793 5.选取λ=28来设计Smith预估控制器.闭环系统的阶跃响应如图6所示.为了比较这三种控制方法的鲁棒性,假设对象参数K、T和L同时变化+50%,仿真结果如图7所示.

图6 例2三种控制方法闭环标称响应比较
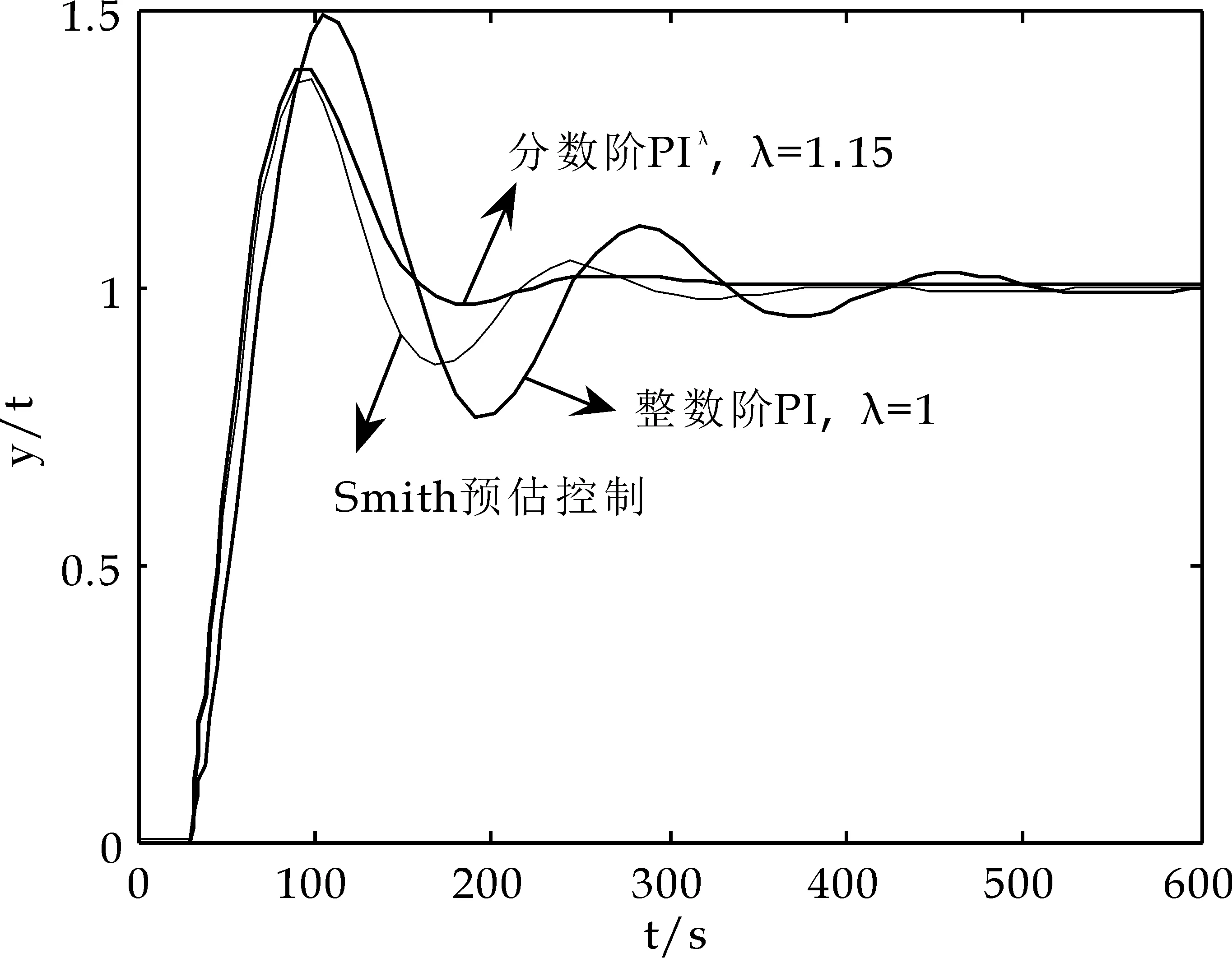
图7 例2三种控制方法对参数变化的鲁棒性
图6表明,这三种控制方法具有相近的目标值跟踪性能;图7表明,分数阶PIλ控制对系统参数变化具有最强的鲁棒性.
3结论
本文针对一阶大时滞对象,提出了一种分数阶PIλ控制器设计方法,基于相位裕度指标设计控制器,并通过优化分数阶次λ来增强系统对控制对象参数变化的鲁棒性.本文同时设计了整数阶PI控制和Smith预估控制,并基于相近的标称性能,比较了这三种控制方法对控制对象参数变化的鲁棒性.仿真结果表明,分数阶PIλ控制对系统参数变化具有最好的鲁棒性.
参考文献
[1] Podlubny I.Fractional-order systems and PIλDμcontrollers[J].IEEE Transactions on Automatic Control,1999,44(1):208-214.
[2] Luo Y,Chao H Y,Di L,et al.Lateral directional fractional order (pi)α control of a small fixed-wing unmanned aerial vehicles:controller designs and flight tests[J].IET Control Theory and Applications,2011,5(18):2 156-2 167.
[3] Tavozoei M S.From traditional to fractional PI control:A key for generalization[J].IEEE Industrial Electronics Magazine,2012,6(3):41-51.
[4] Monje C A,Vinagre B M,Chen Y Q,et al.On fractional PIλcontrollers:Some tuning rules for robustness to plant uncertainties[J].Nonlinear Dynamics,2004,38(1):369-381.
[5] Luo Y,Chen Y Q.Stabilizing and robust fractional order PI controller synthesis for first order plus time delay systems[J].Automatica,2012,48(9):2 159-2 167.
[6] Chen Y Q,Bhaskaran T,Xue D.Practical tuning rule development for fractional order proportional and integral controllers[J].ASME Journal of Computational and Nonlinear Dynamics,2008,3(2):1-8.
[7]MalekH,LuoY,ChenYQ.Identificationandtuningfractionalorderproportionalintegralcontrollersfortimedelayedsystemswithafractionalpole[J].Mechatronics,2013,23(7):746-754.
[8]LuoY,ChenYQ.Fractionalorder[proportionalderivative]controllerforaclassoffractionalordersystems[J].Automatica,2009,45(10):2 446-2 450.
[9]VahidBadri,MohammadSalehTavazoei.Ontuningfractionalorder[proportional-derivative]controllersforaclassoffractionalordersystems[J].Automatica,2013,49(7):2 297-2 301.
[10]FeliuBatlleV,RivasPerezR,SanchezRodriguezL.Fractionalrobustcontrolofmainirrigationcanalswithvariabledynamicparameters[J].ControlEngPractice,2007,15(6):673-686.
[11]HägglundT.Anindustrialdead-timecompensatingPIcontroller[J].ControlEngineeringPractice,1996,4(6):749-756.
[12]OustaloupA,MoreauX,NouillantM.Thecronesuspension[J].ControlEngineeringPractice,1996,4(8):1 101-1 108.
Tuning of fractional PIλcontroller for long time delay system
RUAN Shi-tao, ZHENG En-rang*
(College of Electrical and Information Engineering, Shaanxi University of Science & Technology, Xi′an 710021, China)
Abstract:A tuning method of fractional order proportional integral controller is proposed for the first order plus long time delay system.The specification of phase margin is utilized to design the controller, and an optimization is conducted to choose a proper parameterλto enhance the robustness of the system to the variation of the plant′s parameters. In order to have a fair comparison with conventional control methods,the same specification of phase margin is used in this paper to design the integer order proportional integral controller and the direct synthesis method is utilized to design the Smith predictor controller.Simulation results show that the robustness of fractional order proportional integral controller and Smith predictor controller is superior to integer order proportional integral controller.
Key words:fractional order controller; first order plus time delay (FOPTD) system; Smith predictor control; robustness
通讯作者:郑恩让(1962-),男,陕西凤翔人,教授,博士生导师,研究方向:工业过程控制系统建模与优化、智能控制与系统仿真,zhenger@sust.edu.cn
作者简介:阮士涛(1989-),男,陕西白河人,在读硕士研究生,研究方向:工业过程控制、分数阶PID
基金项目:陕西省科技厅科技计划项目(2012K09-13)
*收稿日期:2015-09-10
中图分类号:TP 27
文献标志码:A
*文章编号:1000-5811(2015)06-0167-05
