基于可编程序控制器的步进电动机驱动方法研究与设计
2015-01-13黄金磊赵毅飞
黄金磊,赵毅飞,李 岩
(河南职业技术学院,郑州450000)
0 引 言
电子与计算机技术的飞速发展,带来自动化集成控制发展的越发迅速[1]。作为运动控制领域的一种关键执行部件,步进电动机因其控制系统实现简单、定位精度高等优点,在各行业都有广泛的应用。可编程序控制器(以下简称PLC)具有的模块化结构、精确的数据处理、控制功能丰富、高性价比、高可靠性、操作方便等优点,逐渐取代传统的继电器控制,成为目前工业控制中应用非常广泛的一种装置。
本文采用西门子公司生产的S7-200 PLC 实现对三相六拍步进电动机的控制。通过PLC 的高速脉冲输出,利用软件实现修改高速脉冲频率的策略来控制电机的高、中、低档三速;并通过移位指令按照步进电动机的工作顺序来控制电机的正转和反转。该控制系统的主要技术要求如下:1)系统可实现电机的正反转起动;2)运行过程中,不需要停机就可以实现正反转切换;3)电机的运行速度分为高、中、低速三档,并可以通过手动进行变速;4)任意位置停机后,再次起动均从A 相起动。
1 步进电动机的PLC 控制原理
步进电动机是一种将电脉冲信号转换成直线位移或者角位移的执行部件[2]。当电机接收到一个脉冲时,步进电动机输出轴会转过一个固定的角度(步距角)。不改变电机的电脉冲方向及励磁状态,电机轴固定在某一个位置而保持停止状态。步进电动机的速度与输入到电机的脉冲频率成正比,而其旋转角度的大小正比于单位时间内的电脉冲数量,三相绕组的导通和关断顺序决定了电机的转动方向。所以,在使用PLC 控制步进电动机时,为了实现对电机的转动角度、转速和旋转方向的控制,就必须实现电机接收的脉冲数量、绕组导通顺序及脉冲频率的控制[3]。目前使用广泛的是两相和四相步进电动机,其缺点是振动和噪声大;而三相和五相电动机更有优势,但是五相电机的驱动系统比三相电机复杂,而三相电机控制系统具有更高的性价比。
从步进电动机的工作原理及工作方式可以看出,要实现对步进电动机的控制就要产生符合要求的脉冲。通过控制输入电机的脉冲顺序,从而实现步进电动机三相绕组供电的依次导通和关断,形成交变的旋转磁场,完成电机的旋转运动。因此要实现PLC 控制步进电动机,PLC 要满足以下两个要求:1)PLC 的输出具有实时刷新技术,使得PLC 的脉冲输出信号频率可以达到数kHz 甚至更高,以提高系统的响应速度,保证电机具有快速动态响应能力。2)步进电动机工作时脉冲电压可以达到几十伏、电流几安培,为了保证控制部分有足够的驱动能力,PLC 的输出要选用大功率晶体管形式[4]。西门子S7-200 系列PLC 本身具有高速脉冲发生器和大功率晶体管输出,可以满足本设计的技术要求,因此选其作为核心控制器,实现对步进电动机的控制。控制原理框图如图1 所示。

图1 步进电动机的PLC 直接控制
2 PLC 控制步进电动机的设计思路
步进电动机控制系统如图2 所示。

图2 典型的步进电动机控制系统
随着电子技术和计算机技术的发展,有多种方案可以实现步进电动机的控制和驱动,按照控制体系可以分为以下三种结构[3,8]:
(a)硬件结构
硬件结构如图3 所示。步进电动机控制系统由硬件电路脉冲发生器和硬件脉冲分配器、驱动器三部分组成。这种控制系统的优点是运行速度快;缺点也很明显,电路复杂,功能简单,系统升级和维护工作困难。

图3 硬件结构控制
(b)软件结构
如图4 所示,控制系统由软件脉冲发生器和分配器、驱动器组成。由单片机或者DSP 通过编程实现软件脉冲发生器和分配器。采用这种控制结构时,上位机一般是通用PC、工控机、PLC 等。这种控制方案的优点是控制电路简单,可以实现非常复杂的功能,但是对控制器的CPU 性能要求较高。

图4 软件结构控制
(c)软硬件结构
如图5 所示,该控制系统由软件脉冲发生器和硬件脉冲分配器及硬件驱动器组成。通过脉冲分配芯片实现步进电动机的通电换相控制。这种控制系统具有电路结构简单、容易实现复杂的功能的优点,同时对CPU 的性能要求不高。

图5 软硬件结构控制
本文采用的PLC 控制方案属于软件结构。由PLC 实现控制系统和驱动器的功能。通过PLC 程序实现脉冲发生器和分配器的功能,对步进电动机进行控制。同时PLC 的输出直接驱动步进电动机,从而实现电机的旋转。
3 步进电动机驱动电路设计
3.1 驱动电路
图6 为步进电动机的一相驱动电路。另外两相与该电路相同。该电路的工作原理:当控制信号1PH 为低电平时,三极管截止,电路输出高电平,光耦不导通,电机的三相绕组中无电流流过;当1PH变为高电平时,T1 导通,光耦动作,向T2,T3 提供电流,使其导通,绕组流过电流。在驱动电路的设计中,为了满足电机绕组静态时大约2 A 的电流,由T2,T3 组成达林顿管,增加其驱动能力[8]。

图6 步进电动机驱动电路
3.2 PLC 驱动步进电动机
西门子S7-200 具有最大频率为10 kHz 的高速脉冲发生器和高速计数器,完全满足步进电动机的控制要求[6]。系统的控制图如图7 所示。

图7 PLC 直接驱动电机
绕组控制程序实现以下功能:通过脉冲分配控制步进电动机三相绕组的通电顺序,从而形成旋转磁场,使电机正向或反向转动。三相六拍的步进电动机的工作顺序为A-AB-B-BC-C-CA-A 时,电机正转;当工作顺序为A-AC-C-CB-B-BA-A 时,电机反转。步进电动机前进一步,绕组控制程序中计算的步数减1,当六步执行完毕,计数器为零,停止脉冲分配,等待下一次动作的开始。由于步进电动机属于感性负载,绕组电阻非常小,为了避免脉冲电流过大造成损坏,应用中需要串联限流电阻,以保证步进电动机的安全。完成步进电动机的控制主要有绕组导通控制和转速控制两部分,分别接PLC 输入的I0.0 ~I0.5 和输出的Q0.1 ~Q0.3[4-5]。如图8 所示。
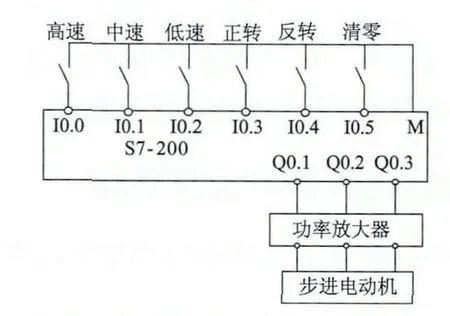
图8 S7-200 PLC I/O 点分配图
4 软件设计
4.1 程序流程图
程序流程图如图9 所示。首先,程序进行初始化操作,清除寄存器,然后选择步进速度,电机正反转方向选择,产生移位脉冲,输出脉冲控制步进电动机,计算六拍计数器数值,进行计数器判断,如果计数器到,进行移位寄存器赋值,否则继续运行。

图9 步进电动机运行时的程序框图
4.2 梯形图程序设计
以步进电动机的控制流程图为依据,结合控制的技术要求,将程序分成四个子程序进行编程:1)高中低三档速度选择;2)电机运行命令控制,包括电机的起动和停止及正反转控制;3)移位寄存器赋值计算处理;4)A/B/C 三相输出控制。子程序测试完成后,进行系统的调试和完善,达到最终的控制要求[7]。
实现步进电动机的不同转速及三相绕组的导通控制所对应的PLC I/O 定义如表1 所示。

表1 I/O 地址对应表
电机的步进控制通过PLC 的移位指令完成。设定MW0 为移位器存器,表2 列出了各寄存器的初始值。

表2 MW0 寄存器初始值
三相六拍步进电动机每前进一个步距角,即前进一拍,六拍完成后重新计数。根据步进电动机的动作要求可以得出电机的绕组控制逻辑表,如表3所示。

表3 绕组通断逻辑表
根据表3 设计步进电动机的梯形图程序。部分程序如图10、图11 所示。程序编写完成后,编译无误,将程序下载到PLC 中,即可运行。

图10 速度控制程序
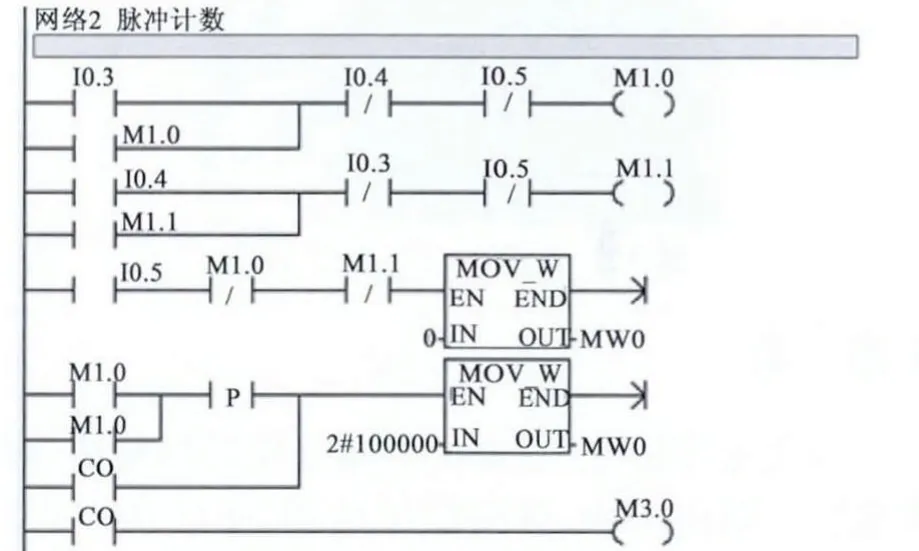
图11 步进电机脉冲计数
4.3 程序简要说明
步进电动机低速起动时,按下I0.2 且上升沿触发,在低速回路中串入中速信号I0.1 和高速信号I0.0 的常闭触点形成互锁,然后使用MOVE 指令将100 传送给移位寄存器VW200。步进电动机正转时,按下按钮I0.3,同时回路中串入的反转信号I0.4 的常闭触点,形成互锁,保证电机正转时反转不能起动。停止时,可以随时按下按钮I0.5,电机在任何位置都会停止运行。为确保正反转时电机都可以从A 相起动,不产生累积误差,正反转信号和计数器C0 并联将数值通过移位指令传给寄存器MW0,从而控制电机的步距角。并通过计数器C0 起动M3.0。当计数器C0 计到6 次时,复位计数器重新计数。VW100 的值不一样,PLC 发出不同频率的脉冲信号,步进电动机在不同转速下转动。M2.0 得电闭合一次,计数器就计数一次,当计数到六次的时候,计数器停止动作,M3.0 对计数器进行复位。通过监视MW0 可以判断PLC 的输出状态和电机的运行状态。中速和高速的控制方式同低速。
4.4 系统的测试与验证
为了验证程序的正确性,搭建了如图12 所示的应用测试系统。步进电动机采用浙机科技有限公司生产的110BYG350。将PLC 程序下载到S7-200中,首先将PLC 切换到运行状态,同时打开软件的程序状态监控功能,并在状态表中选择地址VW100,MW0 进行状态监控。为了观察电机的旋转方向和旋转角度的准确性,在步进电动机轴端安装有角度盘。试验中,当分别按下正转和反转按钮时,电机按照对应的方向进行旋转。电机旋转过程中,在程序中对高、中、低三档速度对应的数字量输入信号强制触发,电机分别以对应的转速进行旋转,且电机转速平稳。在任意状态下,强制清零信号有效,电机立刻停止运转。经过系统的测试,证明该方案达到了设计输入要求,满足使用要求。

图12 系统测试与验证平台
5 结 语
本文充分利用S7-200 可编程序控制器具有的高速脉冲输出功能、方向信号功能,通过PLC 程序并与外部硬件相结合,精确地实现对步进电动机的转速控制。通过控制PLC 的数字量输出和高速脉冲信号的输出频率,实现对步进电动机绕组的导通控制和正反转切换。PLC 功能日益强大,可以利用它方便地实现电机速度和位置控制,从而使步进电动机满足各种复杂场合工作的需要。该方案体现了自动化控制的先进水平,促进了机电一体化技术的发展。
[1] 王鸿枉.步进电机控制技术入门[M].上海:同济大学出版社,1990:72-77.
[2] SEUNG-KI S.电机传动系统控制[M].张永昌,李正鹏,译.北京:机械工业出版社,2013.
[3] 刘宝廷.步进电机及其驱动控制系统[M]. 哈尔滨:哈尔滨工业大学出版社,1997.
[4] 廖常初.PLC 编程及应用[M].4 版. 北京:机械工业出版社,2014.
[5] 隋振有.电气控制与PLC 应用快速入门[M]. 北京:中国电力出版社,2014.
[6] 向晓汉.S7-200 PLC 基础及工程应用[M].北京:机械工业出版社,2014.
[7] 王阿根.西门子S7-200 PLC 编程实例精解[M]. 北京:电子工业出版,2011.
[8] 坂本正文.步进电机应用技术[M]. 王自强,译. 上海:科学出版社,2010.
