多旋翼飞行器发展概况研究
2015-01-01周国庆李正浩
王 锋 吴 江 周国庆 李正浩
(1.辽宁通用航空研究院,辽宁 沈阳110136;2.沈阳航空航天大学航空航天工程学部,辽宁 沈阳110136)
0 引言
多旋翼飞行器其本身最大的特点是结构紧凑,相邻旋翼产生的扭矩会相互抵消,所以不像直升机那样安装反扭矩旋翼,利用空气动力来克服自身重量,动力利用率高,同时可自主或遥控飞行。小型多旋翼飞行器具有,体积小、轻便、易隐藏的特点,可以在复杂环境执行监视等任务。民用方面,多旋翼飞行器在包括航拍、救灾、勘探、侦察、农业等各个领域内都得到了广泛的关注与应用。同时其优异的机动性,操作简单,成本相对低廉,更是成为各大科研机构所青睐[1-4]。
1 多旋翼飞行器早期研究发展
20世纪20年代,法国科学家设计了一个小的无人直升机,尽管这台机器没有成功,但却激发了他的学生Breguet。1907年法国Breguet兄弟制造了第一架多旋翼飞行器,即Breguet-Richet Gyroplane No.1。如图1所示,Breguet-Richet的多旋翼飞行器[5]。Gyroplane No.1于1907年8月在杜埃进行了第一次飞行试验。由于这架四多旋翼飞行器没有安装飞行控制系统,所以导致飞行稳定性很差[6]。
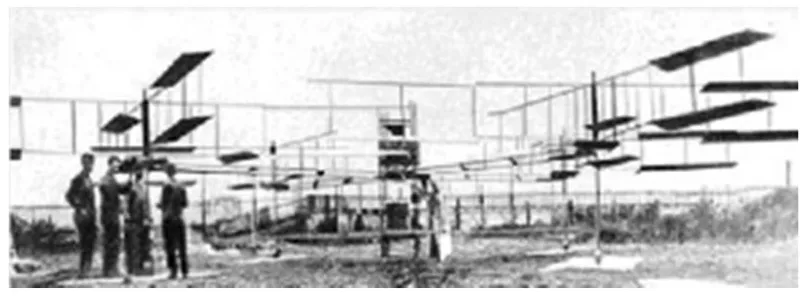
图1 Gyroplane No.1外观图
1922年,George De Bothezat和Ivan Jerome在俄亥俄州南部城市代顿的美国空军基地建造了一架大型多旋翼飞行器,每组旋翼由6个桨叶组成,且桨径都达到26英尺,该飞行器的四组旋翼都由一台发动机提供动能,尽管多旋翼飞行器进行了数百次的飞行试验,但是仍然无法对其飞行状态进行很好的控制,最终放弃了这个项目计划。
1924年,名为Oemichen多旋翼飞行器经过上千次的飞行试验,获得了相当高的稳定性和可控性。1924年4月14日飞行试验,旋翼机首次飞行高度达到了360米,而后的三天试验当中,飞行器的高度达到了525米。飞行距离超过1公里,同时在7分40秒内完成了1公里的闭路飞行。
1956年,名叫Convertawing的人制造了一架螺旋桨直径上超过19英尺的多旋翼飞行器,动力由两台发动机提供,机翼产生前飞升力,改变每组旋翼拉力来实现飞行控制,尽管Convertawings多旋翼飞行器试飞很成功,但很可惜的是由于多种原因,研究人员最终放弃了这个项目。
这一时期设计出的载人多旋翼飞行器,虽然可以进行垂直起降的飞行。但是由于原型机前期表现欠佳,后期的稳定性较差,多旋翼飞行器的实用性没有被推广起来,导致了多旋翼飞行器的发展几乎处于停滞的状态。
2 现阶段多旋翼飞行器的研究状况
在此后的数十年中,多旋翼飞行器没有大的进展。然而,近十几年来,多旋翼飞行器又引起了人们极大的兴趣,随着多旋翼飞行器的动力能源采用电动,碳纤材料以及飞行控制理论等技术突飞猛进的发展[7],多旋翼飞行器的发展带来了前所未有的契机,很多学术论文不断发表,飞行器的结构和性能也得到了极大的优化。与此同时,多旋翼飞行器向微小型和大型两个方面发展。
蒋介石早期对于党义的阐释和宣导较多依赖和借鉴党内元老及幕僚的相关著述,后期逐步将自己的主张融入其中。㉔对蒋介石影响较大的党内元老也大多偏重传统,现代知识不足。据王世杰1940年4月29日日记载:“本党老同志对于孙中山先生主义,大多一知半解,此为最难补救之缺憾。孙中山先生政治与经济主张,系折衷西洋诸国制度与其晚近学说;本党年老诸同志,大都未受完全之现代教育,而尤不直接研读西书,故于孙先生之主张往往不能彻底了解。今晨党中某同志,在国民政府作纪念周,讲民权主义,其议论缺乏政治常识,令人对于三民主义之前途,有无限忧虑。”㉕
2.1 微小型多旋翼飞行器
对于飞行器本身的研究而言,主要是飞行器控制方法改进以及特定控制方案实行,主要的研究方向有:惯导、视觉的方法控制等。在这方面做的最多的是宾夕法尼亚大学、瑞士洛桑联邦理工学院和佐治亚理工大学的研究人员[8-9]。
OS4是瑞士洛桑联邦理工学院开发的小型电动多旋翼飞行器,其研究的主要目的是机构设计和控制算法,同时要实现室内外完全自主飞行。该项目用多种算法实现了飞行器姿态控制。2006用惯导的方法在室内实现了自主悬停控制[2]。
HMX4是宾夕法尼亚大学的一个项目,其设计的四旋翼飞行器不仅实现了稳定的飞行控制;同时也进行了针对四旋翼飞行器的全方面应用研究。整个机构76cm,质量约为700g,机架基部有5个涂有颜色的标志,采用地面摄像头对彩色标示物进行目标跟踪,测量其位置与面积,通过视觉导航方法获取四轴飞行器的姿态和位置状态,角速率信息通过机体安装的三轴陀螺仪测量获取,用以实现飞行器的姿态控制[2]。
在佐治亚理工大学为其所承担的探测火星项目时,设计和研发了计算机辅助四旋翼无人机系统名为GTMAR[2]。它能全自主起降,并折叠。
微型多旋翼飞行器始于美国军方无人机的项目,由于技术限制,把其作为独立项目分离出来。斯坦福大学的研究小组在NASA的资助下,开发了名为Mesicopter的微型多旋翼飞行器。它尺寸仅有一个硬币大小,微电机驱动,旋翼直径3mm,如图2所示。
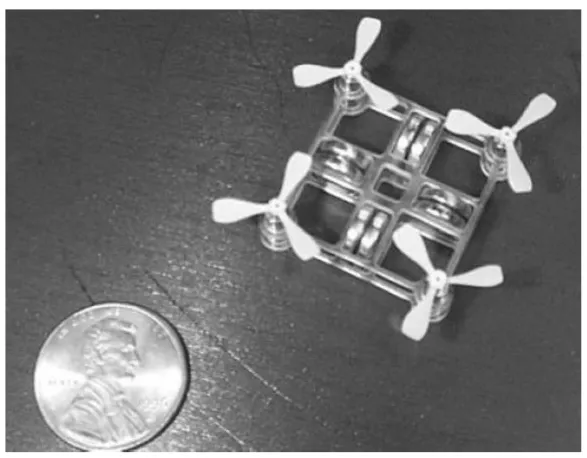
图2 Mesicopter微小型四多旋翼飞行器
2.2 大型多旋翼飞行器研究
多旋翼飞行器在小型成果的同时,大型多旋翼飞行器研发也取得了成功。德国的E-vovo公司研发一款多多旋翼飞行器VC200,主体采用碳纤维复合材料,具有18个电机和旋翼,目前飞行器采用了6组电池供电,每组电池为3台电动机供电,这些电能完全可以维持20分钟左右的飞行。如图3所示。

图3 VC200多旋翼飞行器
军用方面,美国军方开发了一种大型的无人多旋翼飞行器,旋翼系统由8个单独的旋翼构成,并由此产生飞行所需要的动力,最高飞行时速240km/h。如图4所示。

图4 黑骑士多旋翼飞行器
2.3 多旋翼飞行器商业化应用
德国Microdrones、美国DragonFlyer、法国AR.Drone这三家公司在多旋翼飞行器商业化应用的过程当中取得了很大的成功。
MD4-200是德国microdrones公司研发的微型多旋翼飞行器,机体的大部分结构由碳纤制造,由于材料的选定使得多旋翼飞行器在重量和强度方面存在更优异的表现,同时使其具备了抗电磁干扰的能力。在电量不足和无线信息丢失的情况下,飞行器可以自主降落。因装备了多种高精度传感器和卓越的控制算法,使其操控变得非常的简单。MD4-200在飞行的同时可以显示飞行状态和相关数据。
DragonFlyer是Dragonfly Innovation Inc.设计的一种采用碳纤维螺旋桨的多旋翼飞行器,由四个电机驱动,自带平衡、定点悬浮功能。机体下方安装高性能处理器,可以在运行代码的同时接收传感器输出的信息并加以处理。Dragonfly带有开放式通讯应用接口,适应于科研机构或者大学的二次科研开发。
法国Parrot公司研发了一款多旋翼飞行器AR.Drone,有四个独立旋翼,控制人员可以通过外置设备中的软件对其进行飞行控制操作。飞行器基于WiFi信号,因此操控的距离可以达到50米,并且装配了重力感应装置、陀螺仪、机械控制芯片等装置。智能飞行技术可以纠正环境误差,使得可以平稳的飞行。
这三款多旋翼飞行器自上市以来,被广泛用于航空摄影、监视、消防救灾、等众多领域。
3 未来多旋翼飞行器发展趋势
3.1 发展现状
目前多旋翼飞行器在设计、研发、试验各个方面都取得了很大的进展,并且得到了广泛的应用。但多数飞行器的飞行控制设计只设定在特定环境下。离真正的多功能多旋翼飞行器还是存在一定差距。必须提高其各方面的技术能力,才能发挥最佳效果。
现阶段多旋翼飞行器的关键技术与挑战可分为总体设计优化、动力装置、数学模型建立、飞行控制、定位导航与通信这五个方面。
(1)总体设计优化:轻、小、快、低碳环保。
(2)动力装置:旋翼、发动机或电机、减速机构、电机驱动模块、机载电池。
(3)数学模型建立:同时考虑复杂环境对飞行器本身的影响。
(4)飞行控制:由于变量多、非线性等种种因素,使得飞控设计变得十分复杂。
(5)定位、导航与通信:在可靠稳定的基础上实现多个协同控制技术,并且加强其抗干扰的能力。
3.2 发展前景
(1)随着针对多旋翼飞行器相关技术的进一步研究,其技术会逐步成熟。任务规划、飞控、导航装置、通信等子系统将逐步完善,同时具备自主起降和抗干扰稳定飞行的特性,最终的目的是填补目前国际上范围内侦查手段的空白。
(2)多旋翼飞行器在将来会达到MAV的最低要求。随着航空理论及技术的发展,多旋翼飞行器必然会取得重大进展。它将会成为一个集成多种系统的高级复杂系统,并具有隐身和信息传输的能力。
(3)多机编队协调飞行与作战化应用将会更加完善。在未来的战中,对目标进行干扰并最终对其攻击是微小型多旋翼飞行器的任务之一。编队协调飞行更是完成任务和突防的重要手段。
4 结束语
随着关键技术的发展,以及在军事和民用的应用前景,多旋翼飞行器会逐步向高效、多功能化方向发展。并且四多旋翼飞行器的研究涉及多个领域的理论与技术,所以它的研究在解决自身问题的同时,也推动了其他领域关键技术的发展,提供了试验方法,丰富了理论依据,同时也为未来进一步研究多旋翼飞行器打下坚实的基础。
[1]王树刚.四旋翼无人机控制问题研究[D].哈尔滨工业大学,2006.
[2]聂博文.微小型四多旋翼飞行器的研究现状与关键技术[J].电光与控制,2007,14(6):113-117.
[3]R.C.Becerra,T.M.Jahns,MEhsani.Four-Quadrant Sensorless brushless ECM Drive[C]//proceeding from Applied Power Electronics Conference And Exposition.1999.
[4]石屾.微小型无人机电机驱动设计及飞行姿态仿真[D].北京交通大学,2011.
[5]单海燕.四旋翼无人直升机飞行控制技术研究[D].南京航空航天大学,2008.
[6]Gordon Leishman.The Breguet-Richet Quad-Rotor Helicopter of 1907[J].AHS International Directory,2001:1-4.
[7]Fukuda T,Ishihara H,Arai F,Microrobotics,current of art and future[J].IEEE Symposium on Emerging Technologiesffamp;Factory Automation,1995,3(2):29-39.
[8]Mckerrow P,Modelling the Draganflyer four-rotor helicopter[J].IEEE International Conference on Robotics and Automation,2004,4(2):3596-3601.
[9]Bouabdallah S,Siegwart R,Backstepping and Sliding-mode Techniques Applied to an Indoor Micro Quadrotor[J].IEEE International Conference on Robotics and Automation,Barcelona,2005,4:2247-2252.