基于等效源法的近场声全息噪声源识别系统研究与开发
2014-12-31张亚虎毕传兴
张亚虎, 徐 亮, 毕传兴
(合肥工业大学 机械与汽车工程学院,安徽 合肥 230009)
0 引 言
近场声全息技术[1](near-field acoustical holography,简称NAH)是一种先进的噪声源识别方法,通过在被测对象近场获取全息数据,然后利用全息面和声源面之间的空间声场变换关系,重建源面声场。与以往噪声源识别技术相比,NAH不仅利用了声场的传播波成分,还充分利用了声场的倏逝波信息,从而使空间重建分辨率突破了瑞利判据的限制。经过20多年的发展,NAH技术已形成了众多有效的全息变换算法,如空间 Fourier变换法[2]、边界元法 (BEM)[3]、Helmholtz最小二乘法 (HELS)[4]及等效源法(ESM)[5]等,因此,各种全息测量系统也应运而生,最早研制的是可供空气中快照全息测量和水下扫描全息测量的测量系统[6-7]。
20世纪90年代以后,逐渐出现了商业化的全息测量和分析系统,如B&K公司开发的空间声场变换(STSF)系统[8],MTS公司开发的 MTS Sound Explorer分析系统[9]以及LMS公司开发的LMS CADA-X 分析系统[10]。但上述系统主要以基于STSF的NAH为算法根据,要求声源面和全息测量面必须具有规则的形状,从而在一定程度上限制了其应用范围。基于等效源法的NAH技术,是将物体辐射的声场,由置于该辐射体内部的一系列等效源产生的声场叠加代替,从而实现声场的重建和预测。该方法适用于任意形状的声源,避免了BEM方法中的奇异积分问题,同时避免了HELS方法重建长宽高比例较大的结构声场辐射时收敛速度慢和精度低的问题,因此,ESM方法具有适用面广、计算速度快及识别精度高的优点。
LabVIEW是美国NI公司推出的一种基于图形化、用图标代替文本行创建应用程序的虚拟仪器软件开发工具,采用数据流的编程方式,方便快捷,可大大降低软件开发周期及测试硬件设备成本,这种图形化编程语言已经广泛地应用在测量测试、数据采集、仪器控制及数据处理分析等领域中[11]。
本文以基于等效源法的NAH理论为基础,结合LabVIEW软件平台,开发了一套噪声源识别系统。该系统通过传声器阵列同步采集声信号,利用基于等效源法的NAH方法重建整个声场,实现声场的可视化,从而可以直观地判别声源的位置和大小,为进一步的噪声控制提供有力的依据。
1 系统原理
1.1 全息声压的获取
全息面复声压是NAH的输入量,首先需要获取全息面上的复声压。本系统通过采集得到的声压时域信号,经自谱和互谱处理后得到全息面复声压。为了减小因环境噪声干扰等因素引起的实际测量误差,系统在求取复声压时,对全息面每个测点及参考传声器位置上连续采集的多块声压数据作平均处理,全息面上任意点处声压幅值A(ω)为:

其中,NG为采样块数;ps(ω)为全息面上测量传声器采集的第s块时域声压所对应的频域声压。
同理,全息面上任意点处声压相位为:
其中,arg表示取相位,“*”表示ps的复共轭,prs(ω)为参考传声器采集的第s块时域声压所对应的频域声压。获得全息面复声压信息后,即可对应每个频率,采用基于等效源法的NAH技术实现声场重建。
1.2 基于等效源法的近场声全息原理
基于等效源法的NAH技术的基本思想是:将任意形状声源的辐射声场用分布在声源内部的若干个等效源加权叠加代替。假设声源内部布置有N个等效源,则空间任意一点r处的声压和质点振速可以分别表示为:

其中,ρ为媒质密度;c为声速;k为波数;rj和qj分别为第j个等效源的坐标和源强;g(rj,r)为第j个等效源与场点r之间的传递函数,通常取其为Green函数。由(4)式、(5)式可知,如果能找到每个等效源所对应的源强,就可以计算出声场中任意点处的声压和质点振速。
假设全息面H上有M个测量点,则分别有M个与(4)式相同的方程构成声压方程组,写成矩阵形式为:

其中,Ph是全息面上的M阶声压列向量;Ghp是M×N阶声压传递函数矩阵;Q是N阶等效源强度列向量。
此时上述问题转变为确定等效源强度列向量的逆问题,即可采用逆问题的求解方法求解。若传递矩阵Ghp满足M≥N,则可通过奇异值分解技术惟一确定各个等效源的源强[12-13]。此时Ghp奇异值分解为:


由(6)式、(7)式可得等效源强列向量为:

在实际测量时,由于测量噪声干扰等因素,实际测量声压存在一定误差。由于求解等效源列向量Q的过程是逆过程,该误差会在求解广义逆的过程中被放大,从而影响计算精度,甚至造成重建结果失真,所以在计算时必须运用正则化方法稳定求解过程[14-15]。本系统采用 Tikhonov正则化方法[16],使加权得到等效源强向量满足残余范数‖GhpQ-Ph‖2和单边约束λ2‖L(Q-Q0)‖2的加权和最小,即

其中,L为罚矩阵;Q0为初始估计;λ为正则化参数,由L-曲线法则确定[17]。由(9)式可求得等效源强度的正则化解为:

将(10)式代入(4)式、(5)式,即可计算出空间声场中任意点的声压和质点振速。
1.3 正则化参数的选取
从(10)式可以看出,正则化参数λ的选取在求解等效源强过程中起着非常关键的作用。若λ取值过大,正则化后的解基本上仅由奇异值很大的少数几项构成,得到的解过于平滑而失去大量的高空间频率信息。
若λ取值过小,正则化后的解又包含了一些奇异值很小的项,这些项对重建结果贡献小,而对误差又非常敏感,反而增大重建误差。
L-曲线是以对数log-log尺度描述解范数‖Qreg‖2和残余范数‖GhpQreg-Ph‖2的,进而根据对比确定λ,而求取λ关键在于确定L-曲线的拐角位置。文献[18]建议其拐角位置取在L-曲线的最大曲率处,本文系统采用该建议进行拐角值的判断。系统将L-曲线的曲率值取反后,选用黄金分割法优化算法求其极小值,并运用LabVIEW语言编程,即可自动确定L-曲线最大曲率处λ值。
黄金分割法优化算法流程如图1所示。
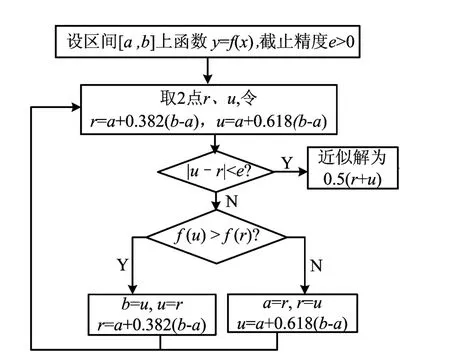
图1 黄金分割法求极小值算法流程
黄金分割法优化算法是一种建立在区间消去法原理基础上的试探方法,适用于区间上的任何单股函数求极小值问题,对函数除要求“单峰”外不作其他要求,甚至可以不连续,适应面非常广。
2 基于LabVIEW的噪声源识别系统
2.1 系统硬件设计
NAH系统需要对声压信号进行采集、处理和计算,最后显示结果,因此,硬件系统需要完成相应的功能。
声信号通过传声器阵列进行多通道同步数据采集,数据由信号调理模块经数据采集卡转化为数字信号,存入计算机内存,然后由软件模块分析处理后得到声场数据及声学图像,最后经终端设备显示和导出。系统结构组成如图2所示。
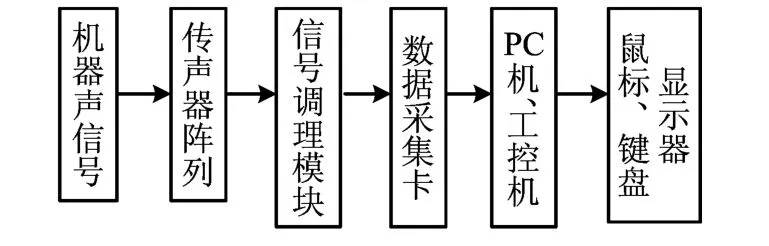
图2 系统硬件结构框图
采用多通道NI PXIe-1082采集机箱,内置5块16通道PXIe-4496数据采集板卡,能支持80个通道同时采集数据,采样率高达204.8kS/s。机箱内含有信号调理模块,可对传声器接收的信号进行放大、隔离、滤波、激励及线性化等信号调理。传声器阵列可根据声源状况选择相应阵列形式,如平面阵列、球阵列及圆弧线阵列等。
2.2 系统软件设计
系统软件由示波、标定、数据采集及数据分析等模块构成,采用模块化思想构建,便于实行功能模块的拓展。
如图3所示,首先通过参数设置,完成传声器标定,由传声器阵列采集声信号,经数据处理后得到全息复声压,利用基于等效源法的NAH算法重建整个源面声场,得到可视化声场图像。其中,数据采集模块中系统采集的声压数据以TDMS文件格式存储,这种文件格式读写数据速度快,占用内存少且可读性强。数据分析模块中,系统可以实现单频和频带下声压和振速的重建。
图4所示为标定模块界面,图5所示为采集模块界面。
系统核心算法全部采用基于LabVIEW的G语言编写,避免了由于混合编程而引起的程序执行效率低下及参数传递冗杂问题。系统的整个架构采用生产者-消费者结构[19]的形式,将各功能模块有机结合在一起,减少了内存占用,提高了系统运行速度。

图3 系统软件模块框图
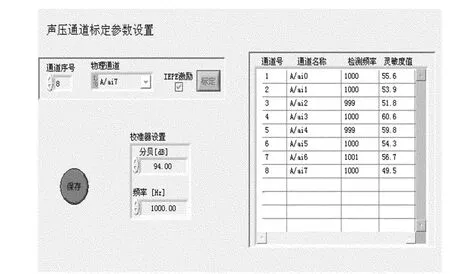
图4 标定界面

图5 采集界面
3 电动机噪声源识别应用实例
将噪声源识别系统应用于功率为2.2kW的三相异步电动机的噪声源识别测试,实验在本底噪声小于16dB的半消声室中进行,如图6所示。扫描阵列为圆弧线(中心角135°、半径为0.12m)阵列,阵列上均匀布置7个传声器。扫描测量时,参考传声器自始至终布置于电动机表面中心区域处,阵列圆心则始终位于电动机主轴线上。
系统通过标定模块对阵列传声器及参考传声器依次进行标定,随后阵列从电动机左端面沿轴线向右依次间隔0.03m进行扫描测量,共扫描16次完成整个全息面的声压信号采集,其中采样频率为20 480Hz,采样块数为50块,每块采样点长度为1 024点。电动机声压信号的频谱如图7所示。

图6 测量装置

图7 电动机声压频谱图
由图7可知,电动机声压信号的优势频带主要集中在500~800、1 200~1 500、2 800~4 500、6 600~7 300Hz,优势频点主要在125、700、900、3 150Hz。实验中选取500~800、2 800~4 500Hz以及单频700、3 150Hz进行分析,系统运算后得到全息面声压如图8所示。为了重建电动机表面声场,设定重建柱面半径为0.08m,经系统处理后所得重建面声压及法向振速云图分别如图9~图12所示。
由图9和图11可知,频带500~800Hz和单频700Hz下电动机的噪声源位置一致,主要集中在距机座底面水平高度0.16m、左端面0.28m的表面区域处。
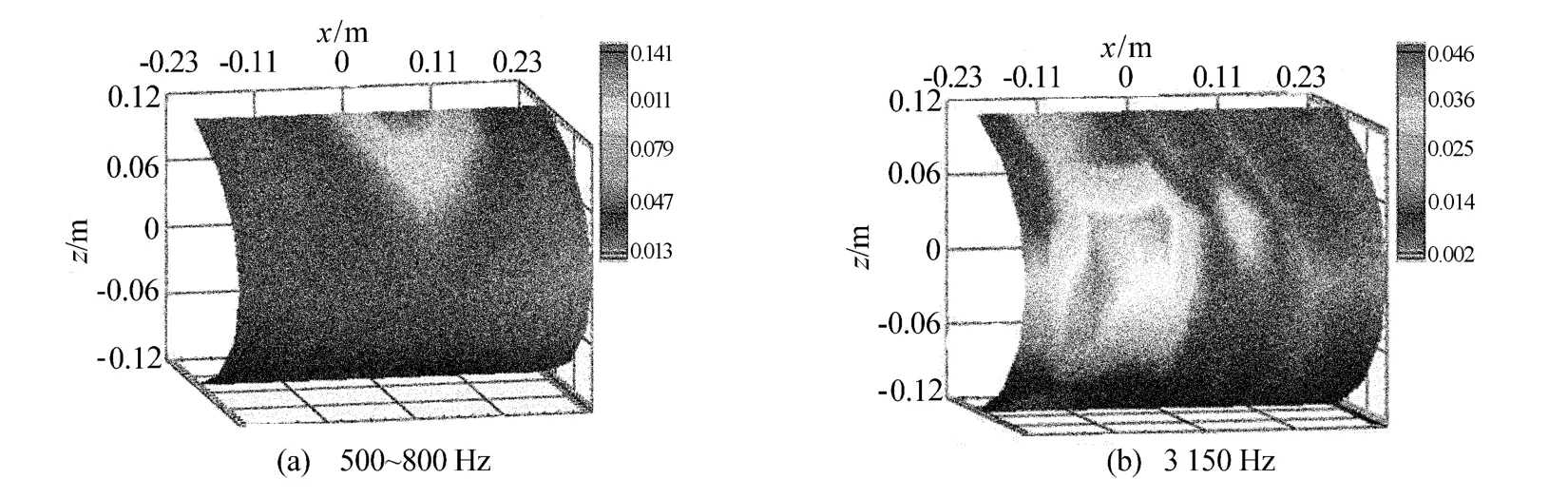
图8 全息声压图

图9 500~800Hz重建面云图
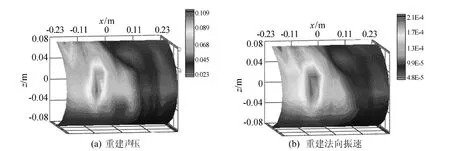
图10 2 800~4 500Hz重建面云图
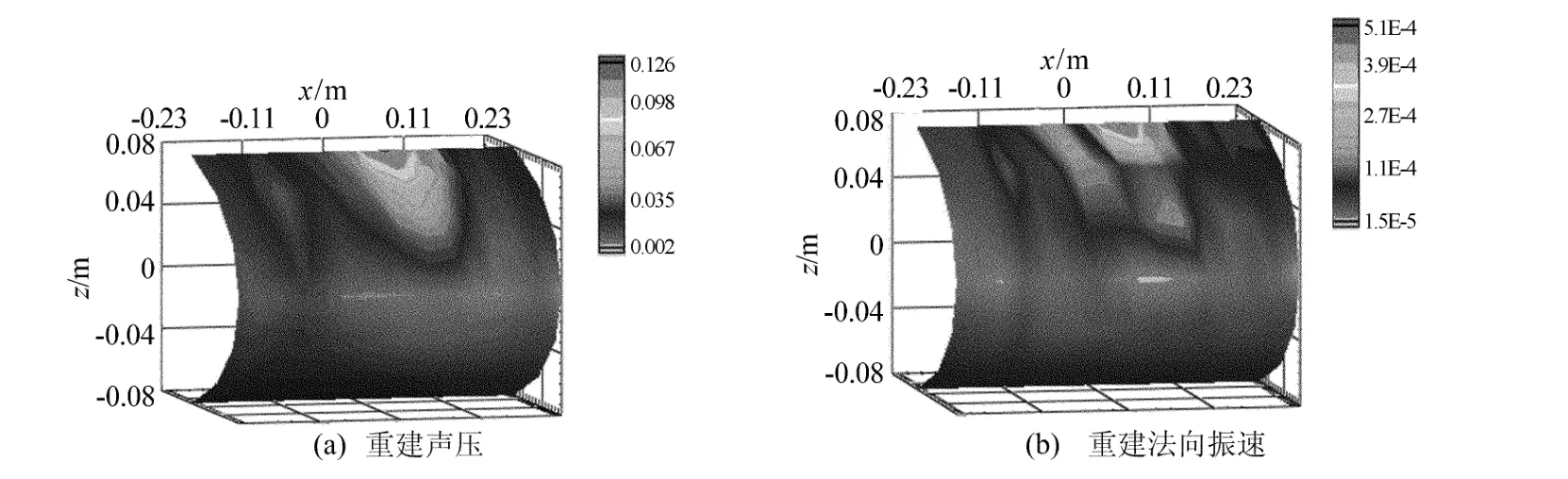
图11 700Hz重建面云图
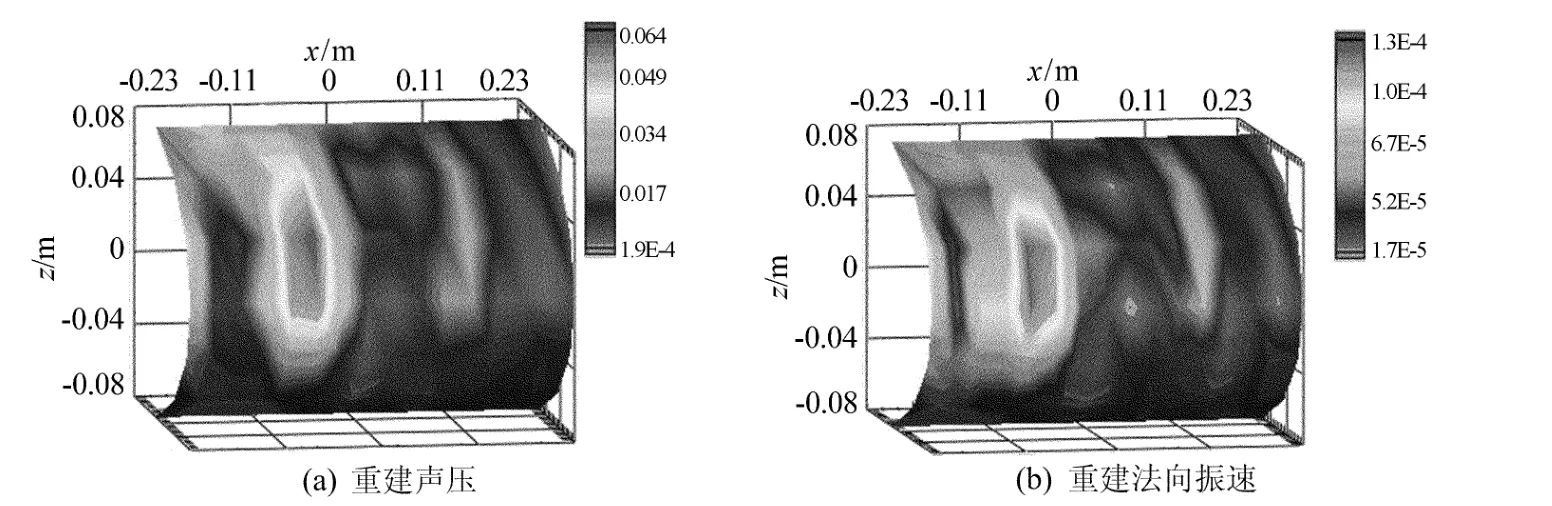
图12 3 150Hz重建面云图
由图10和图12可以看出,频带2 800~4 500Hz和单频3 150Hz下,电机噪声源位置一致,噪声源位置均向左偏移,主要集中在距底座水平高度0.08m、左端面0.14m的表面区域处,该处恰好为电动机轴向表面上风扇的进风口位置。通过以上分析,可以看出该系统能够精确地识别出电动机的噪声源位置。
4 结束语
本文以基于等效源法的近场声全息理论为基础,结合LabVIEW平台,开发了针对任意外形声源的噪声源识别系统。该系统可以满足声场测试及采集分析的要求,实现声场可视化和噪声源识别。通过对电动机噪声源识别实验研究,有效说明了该系统功能和效果以及在实际工程应用中的潜在价值。
[1] Williams E G,Maynard J D.Holographic imaging without wavelength resolution limit[J].Physical Review Letters,1980,45:554-557.
[2] Maynard J D,Williams E G,Lee Y .Nearfield acoustic holography:I.Theory of generalized holography and development of NAH [J].J Acoust Soc Am,1985,78(4):1395-1413.
[3] Veronesi W A,Maynard J D.Digital holographic reconstruction of source with arbitrarily shaped surface[J].J Acoust Soc Am,1989,85:588-598.
[4] Wang Z,Wu S F.Helmholtz equation-least squares method for reconstructing the acoustic pressure field[J].J Acoust Soc Am,1997,102(4):2020-2032.
[5] Koopmann G H,Fahnline J.A method for computing acoustic fields based on the principle of wave superposition[J].J Acoust Soc Am,1989,86(5):2433-2438.
[6] Williams E G,Maynard J D,Skudrzyk E.Sound source reconstruction using a microphone array[J].J Acoust Soc Am,1980,68(1):340-344.
[7] Willimas E G,Dardy H D.Nearfield acoustical holography using an underwater auomated scanner[J].J Acoust Soc Am,1985,78(2):789-798.
[8] Hald J.STSF-a unique technique for scan-based near-field acoustic holography with restriction on coherence [J].B&K Technical Review,1989,1:1-49.
[9] Gratz P.Acoustical holography for visualization of sound fields[C]//Proceedings of the 32nd International Carpathian Control Conference ICCC2002,2002:51-56.
[10] 张胜勇.LMS CADA-X 中声强分析软件及其应用[J].声学技术,2000,19(4):217-219.
[11] 张 兴,司媛媛,张 强,等.基于Labview的虚拟风场算法的研究[J].合肥工业大学学报:自然科学版,2005,28(9):1062-1064.
[12] Kim B K,Ih J G.On the use of the BEM-based NAH for the vibro-acoustic source imaging on the non-regular exterior surfaces[C]//Proc NOISE-CON 98,Ypsilanti,1998:665-670.
[13] Kim B K,Ih J G.On the reconstruction of the vibro-acoustic field over the surface enclosing an interior space using the boundary element method[J].J Acoust Soc Am,1996,100(5):3003-3016.
[14] Bi Chuanxing,Chen Xinzhao.Reconstruction stability of near-field acoustic holography[J].Chinese Journal of Mechanical Engineering,2005,18(4):504-509.
[15] Song L,Koopmann G H,Fahnline J.Numerical errors associated with the method of superposition for computing acoustic fields [J].J Acoust Soc Am,1991,89(6):2625-2633.
[16] Tikhonov A N.Solution of incorrectly formulated problems and the regularization method [J].Soviet Math Dokl,1963,4:1035-1038.
[17] Hansen P C.Analysis of discrete ill-posed problems by means of the L-curve [J].SIAM Review,1992,34:561-580.
[18] Hanke M,Hansen P C.Regularization methods for largescale problems[J].Surv Math Ind,1993,3:253-315.
[19] 刘其和,李云明.LabVIEW虚拟仪器程序设计与应用[M].北京:化学工业出版社,2010:57-61.
