智能烟苗剪叶机控制系统的设计
2014-07-13陈为亚辉胡文武蒋蘋彭凯谭德权
陈为,罗 亚辉,胡文武,蒋蘋 ,彭凯,谭德权
(湖南农业大学工学院,湖南 长沙 410128)
烟草的漂浮育苗现已成为烟区主要的育苗方法。漂浮育苗后期需多次剪叶,绝大部分使用桥式烟苗剪叶机。电动桥式剪叶机、地毯式漂浮育苗剪叶机等除需要人工辅助往复机构在横梁上左右移动和整机沿着苗池过道的纵向行走外,还需专人负责供电电缆随行,作业效率与质量因人而异,自动化水平较低,很难全面达到湖南省农机鉴定站提出的烟苗剪叶机鉴定标准(漏剪率≤5%,伤苗率≤5%,漏拾率≤5%,工作效率≥300 m2/h,连续工作时长≥4 h)。笔者运用无线遥控技术、传感器技术、单片机技术等,对作业宽幅2.5 m 的YZY–ZD 桥式烟苗剪叶机设计了1 种控制系统,以期实现烟苗剪叶机的往复机构往复运动与整机纵向行走自动交互变换,从而达到剪叶机自动运行的目的[4–6],并运用往复运动控制算法对往复机构进行速度控制,使往复机构停止和换向时减少冲击,利用横向往复电机能够充当发电机(往复电机为24 V、60 W 直流永磁往复电机,在惯性冲击下会产生反向电动势,通过整流电路将电能回收给蓄电池充电。将往复电机的输入线短接后,电机转动产生的反向电动势阻碍电机运转,起到刹车作用),吸收往复机构的动能发电,为蓄电池充电,实现动能回收,达到节能的目的。
1 设计原则
YJY–ZD 型桥式烟苗剪叶机如图1 所示。以2个边架支撑2 根横梁,往复机构在横梁上作往复运动,剪叶器固定在往复机构下端,为了使剪叶器以“弓”字形的轨迹覆盖整个烟苗池,需要整机纵向行走与往复机构横向往复运动交替进行。在控制系统的设计过程中,确定5个设计原则:①烟苗剪叶机在单人操作下作业,无需人工牵引或控制;②保证烟苗剪叶机的作业效率不变或有所提高;③基于单片机作为中央处理器来处理和控制信号,同一套系统能快速适应多种幅宽的苗池,保证通用性和操作简便;④采用系列抗干扰措施,使整机工作稳定可靠;⑤采用逻辑控制算法,避免误操作和保证安全。

图1 YJY–ZD 型桥式烟苗剪叶机 Fig.1 YJY–ZD bridge type leaf-cutting machine
2 控制系统的设计
2.1 控制系统的结构
控制系统需要执行的动作包括:剪叶器电机开与关、横向往复电机双向动作、电控端头解锁机构启停(电磁铁通断)、纵向行走电机双向动作、消毒泵开与关、电动推杆伸缩(直流电机正反转)。执行元件为直流电机和电磁铁。电磁铁直接用继电器控制,直流电机分2 种:对于需要双向动作的,采用直流电机驱动板控制;对于只需要启停的采用继电器控制。系统控制框图如图2 所示。
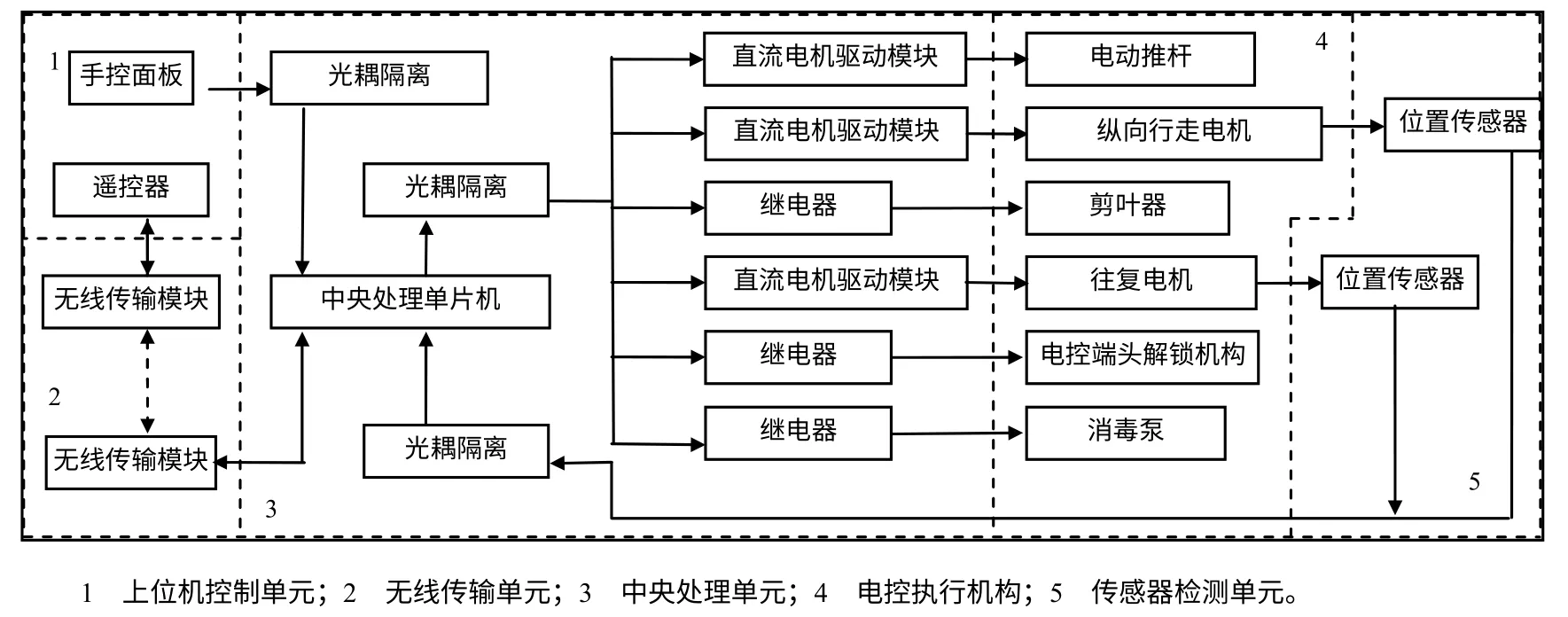
图2 控制系统 Fig.2 Block program for the control system
根据烟苗剪叶机的控制系统框图,控制系统包括:上位机控制单元、无线传输单元、中央处理单元、电控执行机构、传感器检测单元。传感器检测单元[3–5]主要是往复机构横向往复运动位置检测和纵向行走步长的检测。横向往复电机的位置传感器是在其中1 根横梁内侧相应位置安装6个接近开关,用于感应往复机构在横梁上的位置,其中靠近两端的接近开关是在往复机构运动到接触边架时才触发,其余4个以横梁中间对称安装。纵向行走的位置传感器是在纵向行走传动机构中安装1个接近开关,用于采集纵向行走实际的步长信号次数。为了达到设计目标,控制系统准确判断执行控制程序,控制往复机构在横梁上横向往复与整机纵向行走的准确及时切换,以使剪叶器顺利完成“弓”字形运动轨迹,对剪叶机剪叶效率和质量至关重要。系统控制逻辑循环如图3 所示。
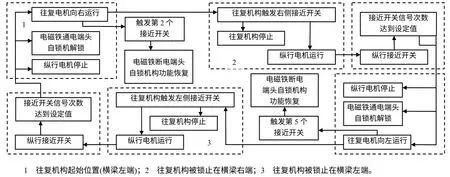
图3 联合控制循环 Fig .3 Logic diagrams of the combination control
1) 以STC12C5A60S2 单片机作为中央处理单元,通过NRF905 无线接收模块接收遥控指令信号,或者按照电控盒上的按键选择作业模式。
2) 通过多路霍尔接近开关,获得往复机构在横梁的位置和时间参数,从而计算出往复机构的运行速度,单片机运用控制算法产生控制信号,综合运算控制往复机构的加速度,达到控制往复机构高效平稳作业的要求,判断往复运动到纵向行走的切换时间,并以此标定为往复运动的“时间终点”和纵向行走的“时间起点”,控制往复运动到纵向行走的准确切换。
3) 通过单路霍尔接近开关传感器,获得纵向行走步数参数和时间,单片机根据传感器传回的信号,计算出纵向行走的运行速度,并发送控制信号,控制纵向行走的平稳变速启停。判断纵向行走到往复运动的切换时间,并以此作为往复运动的“时间起点”和纵向行走的“时间终点”,控制纵向行走到往复运动的准确切换。
4) 霍尔接近开关的开关量信号通过T1P521-M4 进行光耦隔离,再传给中央处理单片机,中央处理单片机发出的控制信号同样通过T1P521-M4 进行光耦隔离,再输出控制各继电器或者直流电机驱动模块,由继电器或者直流电机驱动模块直接控制驱动马达等,同时将改变后的状态通过传感器反馈至中央处理单元进行比较,实现对纵向行走和往复运动的闭环控制。
5) 控制过程中,电控端头解锁机构中的棘轮自锁装置能使往复机构在每次完成横向往复运动后都能紧靠边架,在整机纵向行进中,保障剪叶器能覆盖苗池边沿的烟苗,只有在其电磁铁通电解锁后,才能解除棘轮的锁止,使横向往复机构完成下一往复过程。
2.2 下位机硬件电路的设计
为了维修方便并降低维修成本,对控制电路进行了模块化设计,将控制电路分为3 部分:中央控制单元、继电器电路、直流电机驱动电路。
中央处理单元电路如图4。主控芯片采用STC12C5A60S2 单片机, 该单片机具有8个ADC 转换通道,2 路可编程PWM 和4个16 位定时器,能够实现多传感器的信号采集处理。该单元通过2.4 GHz 的无线通讯模块与上位机进行数据通讯,主要包括直流稳压电源、晶振电路和其他外围扩展电路。图4 中区域1 为电源电路,剪叶机由24 V 蓄电池供电,接近开关、继电器线圈和电磁铁电压为12 V,单片机电压5 V。电源电路将24 V 电压经过DC–DC 转换为12 V,再经过7805 芯片转换为5 V,得到3 种电压,因此,外部24 V 供电的电气启停时的电压冲击不影响电路后面12 V和5 V电压源供电传感器的数据采集,5 V 为中央处理单片机供电。由于7805 芯片降压后的带载能力有限,增加1 路24 V 直接经过7805 降压成5 V 的电路,用于其他芯片的供电,使整体供电可靠性有保障。区域2 为发电整流充电电路,将往复机构所发出的不稳定的电转换成稳定的30 V 电压,为蓄电池充电。区域3为光耦隔离电路,采用的是5 kHz 以上的光耦,能有效保障通信通畅,转换不失真。区域4 为中央处理器单片机和附属电路,单片机的I/O 口与无线通信模块之间采用光耦隔离,且采用不同的5 V 供电彻底隔离,可有效避免无线通信与单片机之间的相互干扰。
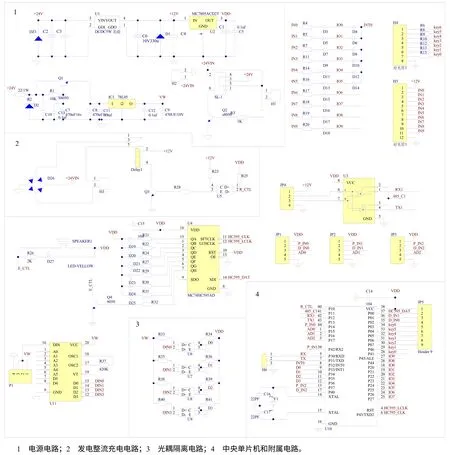
图4 中央处理单元电路 Fig.4 Scheme of central processed unit circuit
直流电机驱动电路(图5)直接与中央控制单元连接,继电器电路(图6)通过485 通信将信号传输给中央处理单元。控制电路中的直流电机驱动电路和继电器驱动电路容易发生过热失效,单个直流电机驱动模块相对独立,可以单独更换。所有的继电器控制集中在1 块独立的电路板上,这样能最大程度消除继电器吸合带来的干扰。全部模块置于控制盒中,在控制盒外只留有不同型号的标准的航空接头,以便安装。
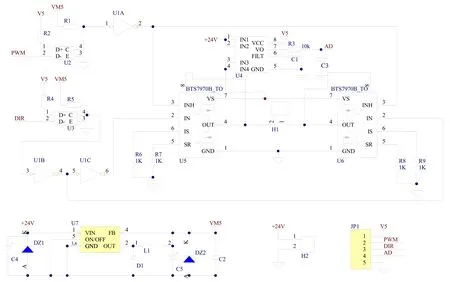
图5 直流电机驱动电路 Fig.5 Scheme of DC motor driven circuit
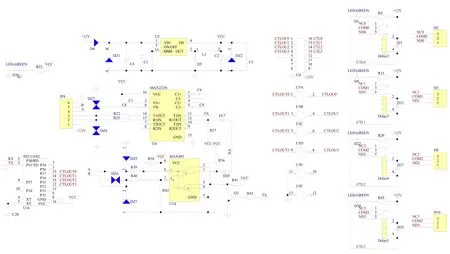
图6 继电器电路 Fig.6 Scheme of relay circuit
2.3 往复运动控制算法
控制系统核心是控制算法[12–13],烟苗剪叶机控制系统的核心是往复运动控制算法。往复运动控制算法是控制往复电机的加速、动能回收、刹车制动、端头自锁电控解锁、横向行走与纵向行走切换,再反复循环。以横向往复机构从左向右运动为例,对往复电机的控制逻辑参数设定见表1。

表1 单片机信号的采集与控制 Table 1 Signals collected and controlled by SCM
算法是通过对全速运行持续时间 nT1′ 、动能回收状态持续时间 nT1′′ 和短路制动状态持续时间 nT1′及其占空比的调整,达到设定的高速往复作业速度,同时为避免往复机构运动到端头时速度太大造成冲击,将往复机构的惯性动能带动往复电机发电,为蓄电池充电,实现动能回收。如果靠近端头末端的速度仍然过快,则使用短路制动,避免冲击。
Tn表示往复机构第n次从左向右运行的实时的时长(ms),T0= T '0=2 400 ms。
T 'n表示往复机构第n次从右向左运行的实时的时长(ms)。
D1n表示往复机构第n+1次从左向右运行的占空比(%)。
F1n表示往复机构第n次从左向右运行,接近开关4 触发到接近开关5 触发的时间长参数(ms),
3 剪叶试验
2013年3月,在湖南省桂阳县正和烟草站育苗大棚进行了剪叶试验。漂浮苗池宽2.5 m,长度分别为30 和60 m,苗盘为10×20 穴泡沫苗盘,烟苗平均高度130 mm,修剪高度100 mm。任意抽取其中10 盘。剪叶结果表明,伤苗率为0.4%,远低于设计要求的1%,说明剪叶机高速往复运动时对烟苗没有伤害;漏剪率为0.55%,远低于设计要求的5%,说明剪叶机的漏剪率很低;漏拾率为0.4%,远低于设计要求的5%,说明集叶效果很好,基本没有残叶。随机选取30 m 长苗池,完成剪叶所用时间约6.5min,剪叶效率达692 m2/h。
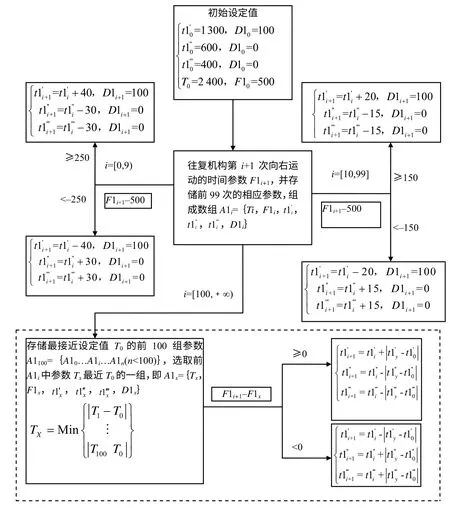
图7 算法流程 Fig.7 Algorithm flowchart
[1] 张广智.全自动烟苗剪叶消毒机的设计与研究[D].长沙:湖南农业大学工学院,2012.
[2] 卢秀萍.中国烟草品种现状及育种对策[J].西南农业学报,2006,19:400–404.
[3] 李福明.烤烟小棚漂浮育苗关键技术研究[D].北京:中国农业大学食品科学与营养工程学院,2005.
[4] 蒋蘋,胡文武,罗亚辉.机滚船遥控驾驶系统设计[J],农业工程学报,2009,25(6):120–124.
[5] 蒋蘋,胡文武,罗亚辉.多通道学习型遥控器研究[J].湖南城市学院学报:自然科学版,2009,18(2):67–70.
[6] 胡文武,蒋蘋,艾卫中,等.基于自学习机制的无线农用水塔控制系统研究[J].电子设计工程,2010(4):3–6.
[7] 郭天祥.新概念51 单片机C 语言教程——入门、提高、开发、拓展全攻略[M].北京:电子工业出版社,2013.
[8] 李进,蔡延贵.软启动技术在电机控制中的应用[J].化工设备与防腐蚀,2002,5(5):331–333,310.
[9] 张卫丰,王瑞春,刘德新.直流马达软启动电路研究[J].通信电源技术,2011,28(1):42–43.
[10] 李洪珠.直流电机的PWM 控制系统设计[J].集成电路应用,2005(10):49–51.
[11] 宫芳.无线遥控系统的模块化设计方案[J].中国科技信息,2005(24):53.
[12] 郑宗汉,郑晓明.算法设计与分析[M].北京:清华大学出版社,2005:340–353.
[13] 禹建丽,Kroumov V,孙增圻,等.一种快速神经网络路径规划算法[J].机器人,2001,23(3):201–205.