MatlabSimulink下液压仿形刀架仿真
2014-07-08张笃增
张笃增
(山东莱芜钢铁冶金生态工程技术有限公司,山东 东莱 271105)
0 引 言
所谓仿形加工,其实就是在批量生产状态下所实施的一种高效加工措施,目前仿形加工被广泛应用于机械制造业中。作为一种位置伺服系统,仿形系统中比较环节、给定及反馈等均有机械部件共同构成,一般仿形系统也称机液伺服系统,其主要特点是性能可靠、结构简单,但是由于机械反馈环节间隙及不断摩擦等各种非线性因素,会在某种程度上影响系统性能,进而影响仿形加工精度[1]。所以,研究机液伺服系统仿真与建模就显得比较重要。依照液压仿形刀架组成及其结构原理,构建了仿形刀架数学模型,并以根据MATLAB 动态仿真工具中的Simulink,构建液压仿形刀架系统仿真模型,通过对其实施仿真分析,最终获得全面反映系统性能的仿真曲线。
1 液压仿形刀架的数学模型
1.1 液压仿形刀架组成及机构原理
车床液压仿形刀架属于阀控缸伺服系统范畴,车床液压仿形刀架结构简图见图1,固定安装液压缸活塞杆,缸体和阀套为刚性连接,模板和触头相接触,在触头处输入xi,xv为杠杆带动阀芯位移。阀套和阀芯之间由于不断发生位移而产生对节流口进行控制的开度,对进出液压缸中压力油流动方向与流量进行有效控制。刀架在缸体的带动下发生运转。同时,逐渐减小控制节流口,直至阀芯和阀套恢复至其原始位置。对刀架进行有效控制,使其随着触头平稳运转[2]。事实上,触头输出力远远小于车刀本身的力,而仿形刀架本身就属于一个提升力的机器。仿形板中,杠杆位移xi表示液压仿形刀架系统输入量,液压缸位移xe表示输出量。伺服阀属于一个比较放大元件,杠杆属于一个反馈元件,液压缸属于一个执行元件。组成液压仿形刀架的框图见图2,液压仿形刀架框图中,反馈系数Kf与输入系数Ki表示相关杠杆系数。

图1 液压仿形刀架机构简图

图2 液压仿形刀架组成框图
1.2 仿形刀架和液压缸的数学模型
根据图1 中,可以得出液压缸受力平衡方程

式中:PL为负载压力,PL=P1-P2,P1、P2分别为液压缸工作压力;B 为黏性阻尼系数;A 为液压缸工作面积;m 为液压缸中刀架总质量;FL为活塞轴线中切削力分量;K 为刀架弹簧刚度,Xe为液压缸位移。
依照流体连续性流动方程,从某腔体中流出、流入的流量之差与液容导致的腔体体积变化率和腔体自身体积变化率之和相等。液压系统连续性方程可表示为

式中,K1(K1i+K2e)/2 为液压缸总泄漏系数,qL为液压缸负载流量,βe为体积弹性模量;V 为油液总压缩容积。
如果不对伺服阀动态过程予以考虑,可以将其线性化用方程公式表示为

式中,Kq为伺服阀流量增益,Xv为伺服阀阀芯位移,Kc为伺服阀流量,PL为压力系数。
如果不将反馈杠杆动态特性考虑在内,在液压仿形刀架中,可以用方程表示为


图3 液压仿形刀架仿真模型
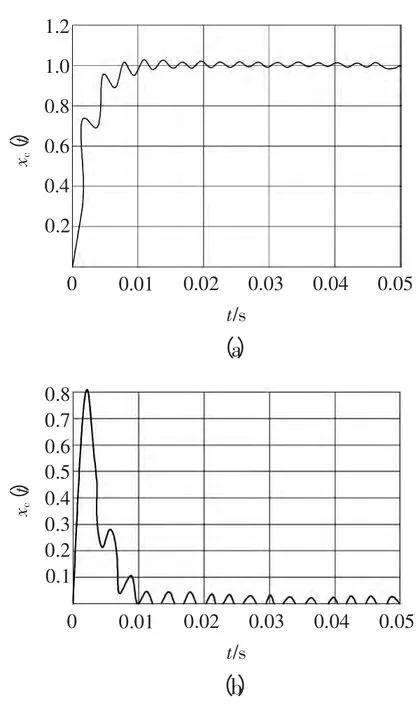
图4 输入信号作用下的液压仿形刀架仿真曲线
对式(1)~式(4)两端进行拉氏变换,能够将液压仿形刀架系统结构图构建出来。具体由MATLAB/Simulink 对液压仿形刀架仿真模型予以构建。通过Simulink 建立的液压仿形刀架仿真模型如图3,此为单输出、双输入线性定常系统。系统同时受作用于两个输入信号,即负载扰动信号FL与杠杆触销位移Xi。
2 仿真分析
本文通过时域分析法分析液压仿形刀架性能。依照液压仿形刀架本身所具有的结构参数,对其实施仿真过程中选择液压仿形刀架参数分别是:B=0.06,A=0.003 85,m=20,Kf=Ki=0.5,K1=3×10-15,Ke=1.65×10-11,Kv=1.5125×10-13,Kq=2.72[3]。具体实施仿真所得系统对负载扰动与输入信号的单位脉冲响应与单位阶跃曲线,见图4、图5。从图4、图5 中可以看出,液压仿形刀架系统本身具有稳定性,可以快速对所输入信号进行跟踪阶跃,同时也可以快速将影响脉冲输入信号的因素消除掉,此外,液压仿形刀架也具有比较小的稳态误差。由此充分表明,液压仿形刀架的快速性、稳定性以及准确性等性能都比较好。仿真过程充分表明,负载FL、液压缸总泄漏系数K1与黏性阻尼系数B 几乎不会影响到系统输出,甚至可忽略不计。然而,仿形刀架本身所具有弹性会严重影响到系统输出,所以,必须将其考虑在内[4]。
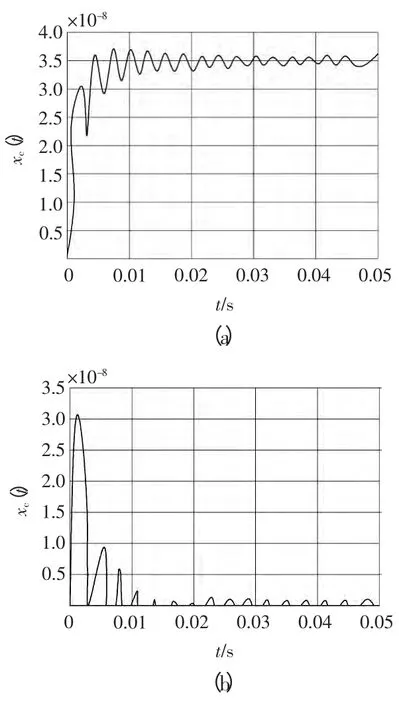
图5 负载扰动作用下的液压仿形刀架仿真曲线
3 结 语
通过MATLAB Simulink 仿真与建模液压仿形刀架伺服系统进行分析与探讨,具体仿真过程中,能够对其参数进行反复修改,便于对实际系统进行模拟,快速设计出最佳模拟方案,使系统设计流程得到极大简化。而这也在某种程度上彰显出MATLAB Simulink 下液压仿形刀架仿真的优越性与实用性。本研究中所使用的建模仿真措施在其它类型速度、力的液压伺服系统中也都较为适用,所以MATLAB Simulink 仿真工具具有很大的工程实用价值,有利于提高工业机械制造业加工效率。
[1] 夏瑾,李刚.基于Simulink 的击针着发机构仿真研究[J].装备制造技术,2009(1):31-32.
[2] 郭美华,李翔晟.仿形刀架机液伺服控制系统动态特性仿真[J].机械研究与应用,2008,21(6):100-101.
[3] 黄勇,陈逢军.基于MATLAB 的数控钻尖磨床仿真[J].机械,2007,34(3):44-46.
[4] 胡良谋,李景超,曹克强.基于Matlab/Simulink 的电液伺服控制系统的建模与仿真研究[J].机床与液压,2003(3):230-231.
