基于多传感器网的露天矿边坡形变监测
2014-06-07任月龙李如仁
任月龙,李如仁,张 信
(1.中国矿业大学矿业工程学院,江苏徐州 221116;2.内蒙古大唐国际锡林浩特矿业有限公司,内蒙古锡林浩特 026000;3.辽宁工程技术大学时空分析与建模研究院,辽宁阜新 123000)
基于多传感器网的露天矿边坡形变监测
任月龙1,2,李如仁3,张 信2
(1.中国矿业大学矿业工程学院,江苏徐州 221116;2.内蒙古大唐国际锡林浩特矿业有限公司,内蒙古锡林浩特 026000;3.辽宁工程技术大学时空分析与建模研究院,辽宁阜新 123000)
基于测量机器人监测、GPS监测及地基微波雷达监测是当前形变监测的主流技术手段,然而现有的应用都没有将3者很好的结合,基于此提出了面向露天矿边坡变形的多传感器自动化监测系统,给出基于多传感器网的矿区形变监测的数据融合及系统方案。通过对多传感器网数据采集及数据融合与应用,可实现雷达数据与测量机器人、GPS数据的矿区形变监测的信息互补,提高监测的实用性。以内蒙古锡林浩特胜利煤田中东部的胜利东2号露天煤矿为例,设计并实现了多传感器网形变监测数据分析,结果表明,多传感器系统能够保证露天矿边坡监测数据在时间上的连续性、空间上的无缝性、结果上的可靠性,为边坡变形分析和预警预报提供了一种解决方案。
多传感器;露天矿边坡;形变监测
形变监测在工程技术中具有重要的作用[1],边坡形变监测的意义在于掌握边坡的稳定状况、位移和变形的规律等,为滑坡预报提供依据,从而保证矿山生产安全、高效、经济。露天矿区(以下简称矿区)的边坡稳定问题是影响其开采的重要因素,GPS、测量机器人、地基微波雷达等自动化程度较高的传感器已被大量应用于边坡监测中[2-3]。利用传感器网采集边坡形变监测已有不少产品,如瑞士徕卡公司的GeoMoS和美国AGI公司的Slope-Sentry等,但大多都仅针对单一传感器实现自动化监测,没有充分利用各传感器之间在信息上的相互补充和印证关系[4-6]。研究多传感器的信息融合和信息互补,可以为矿区边坡监测数据分析和预警预报提供一种全局、稳健、有效的途径[6]。为了满足矿区边坡形变监测,本文提出建立统一的变形观测网络,结合多传感器的特点,通过多数据融合和分析,为矿区边坡监测数据分析提供一种全局、稳健、有效的方法。
1 多传感器网形变监测数据的融合
1.1 基于多传感器的矿区边坡形变数据采集
露天矿区边坡形变监测需要实现时间上的连续观测、空间上的无缝覆盖以及结果的高精度。由于监测目标区的地形、信号强弱及传感器成本的限制,使用单一传感器时,存在信号源不稳定、设备成本高,使边坡形变监测的应用工程无法实施。因此,现有基于单一传感器数据采集及分析,无法满足区域化矿区边坡形变监测的需求,需要融合多传感器数据及分析方法。
矿区形变监测中,首先需要解决形变数据采集,常用的数据采集方法有GPS、测量机器人和微波雷达等[7-9]。上述监测数据采集方法,各有优缺点,在矿区边坡形变监测中,应结合各自的优势。GPS监测具有设备操作简单、监测数据点易于扩展等优点,但是高精度GPS设备成本较高、观测点必须有较稳定的GPS信号,而且GPS仅可实现单点观测,要实现区域观测,往往需要借助大量的监测点进行组网完成。相对于GPS,测量机器人具有费用低、可任意增加监测点数量,监测点布设灵活,但对监测环境的依赖性强,并且需要有良好的通视条件。微波雷达监测可实现较大范围的区域性监测,对环境依赖性小,适用于大面积监测,但微波雷达仅采集二维点阵数据,且也要求对观测目标的通视性好。实际工作中,考虑到各监测方法的特点,一般用微波雷达来完成面域的点阵观测,高精度GPS实现少数重点点位的监测,将测量机器人布设在低地形区(GPS接收信号较差且微波雷达无法覆盖的区域),并且GPS和测量机器人同时为微波雷达观测结果提供数据校准和结果评价信息。由于GPS和测量机器人监测点采集的数据均为具有地理坐标的三维数据(平面地理位置和高程值),而微波雷达数据采集结果为无地理坐标的二维点阵图像,在数据融合和分析前,需将雷达数据归算到统一的地理坐标系下,使其可以与GPS、测量机器人监测数据融合,对3种数据进行综合应用和分析。
1.2 多传感器形变监测的数据融合和分析
在多传感器网的矿区边坡形变监测中,各传感器在数据采集上担负着不同的角色。首先借助于微波雷达的区域观测能力,GPS和测量机器人提供重点区域(如GPS信号较弱、测量机器人无法操作)的数据补充和数据校准[10],微波雷达利用差分合成孔径雷达干涉测量,完成不连续形变量的获取和不连续形变区域的定位。多传感器网形变监测需要实现对观测数据的自动采集、实时传输、计算与分析,因此,涉及到复杂的软、硬件设计及集成,由于近年来形变监测硬件设备、无线数据传输及空间数据计算能力的不断改进,使得集成多传感器网进行矿区边坡形变监测成为可能。
雷达象元与地面坐标的转换,通过地基雷达观测点和观测范围的几何关系进行求解,借助雷达图像中角反射器位置坐标,并以DEM的高程作为其高程真值,即可根据式(1)确定象元与地面坐标的转换关系,生成监测区域的雷达图像点阵与地面坐标对应的三维坐标数据文件,从而实现雷达图像与地面坐标的匹配(图1)。

式中,X,Y为地面坐标;I,J为象元行列号;I0,J0为起始象元行列号;ax,ay,bx,by,cx,cy为转换系数,由起算数据求得。

图1 地基雷达观测点和观测范围的立体几何关系Fig.1 3D geometry relationship between GB-SAR station and scan area
由于各种传感器在进行数据采集时本质上都具有时间频率及空间分辨率(时空不连续性),为保证对监测区形变监测的时间连续性、空间无缝性和精度有效性,需要对整个时空监测结果进行数据的时间插值和空间插值,实现时间连续性和空间的全覆盖,同时进行时空插值时利用部分GPS监测点和测量机器人数据,来进行插值结果的精度验证[11]。笔者采用的方法是首先对采集数据进行空间插值,弥补单一传感器采集数据可能产生的空间缝隙,再通过时间插值,形成连续时序的监测结果。
空间插值的方法采用普通克里金法(Ordinary Kriging)法,与传统的插值方法(如最小二乘法、三角剖分法、距离加权平均法)相比,Kriging空间插值具有较好的优势,可以实现更好的插值逼近程度、良好的插值外推能力及更广的适用性[12],假设观测区有n个监测数据点 x1,x2,…,xn,任意未知点 s的值Z(s),是由已知监测数据的加权估算得到,按式(2)计算。

其中,s为未知的位置点,可以是用经纬度表示的空间坐标;Z(s)为该位置点的估算属性值(形变量);wi为已知测量点xi的权重。普通克里金法方法关键要计算已知观测点的贡献权重wi,可以通过该估算方法的无偏性和最优性条件计算获得[13]。
对非连续时间监测结果数据集,采用临近点线性插值法[14],以空间插值结果为插值基础,对任意一空间点s进行时间插值,对于任意时刻t和空间点s,t>t1且t<t2,则t时刻对应的监测结果值Vt为式中,Vt2(s)和Vt1(s)分别为s点上距离时刻t最临近的前一时刻t1和后一时刻t2的监测值。

利用多传感器网的监测结果,在2个层次上进行插值精度的检验。首先在空间插值上,利用GPS和测量机器人的测量结果,对空间插值结果进行检查;其次,在时间插值结果上,采用不同期的GPS及测量机器人监测结果,对时序插值结果进行检测,实现对插值精度的控制和检验。精度检验的方法采用交叉验证法,即对于任意已知观测点xi,采用时空插值形变量与该点的观测形变量的相对差异的平均值v来评价精度,可用公式表示为

式中,Z∗(xi)为观测点的形变量插值结果,为观测点的实际形变值。
2 基于多传感器网的矿区形变监测系统设计
边坡变形自动监测系统是一个复杂的数据采集、传输和处理的自动化系统,由传感器网、无线通讯系统、供电系统、数据处理分析平台软件等组成(图2),其中对多传感器监测系统而言,传感器网(传感器系统)、数据传输网(数据通讯)及数据处理分析系统(数据处理和控制)的设计尤为重要,分别解决形变数据的采集、获取、结果分析。

图2 多传感器网形变监测系统的结构Fig.2 Architecture of multi-senson monitoring system
2.1 多传感器数据采集网的设计
多传感器数据采集网(简称传感器网)实现形变监测的数据采集问题,传感器网的设计以监测覆盖度高、投入成本低、实现有效的监测精度为基本设计原则,在设计时充分考虑多传感器信息采集的局限性和互补性,同时考虑辅助站点(如基准站、参考点)的部署。
GPS和测量机器人系统布设以监测区域现场环境和地质环境等因素为依据,选择具有代表性的点,要尽量涵盖边坡所在区域,其中,GPS监测点抗灾害破坏力弱、成本高,主要布设在监测区域重点部位,测量机器人监测点主要布设在采场底部,便于测量机器人工作。雷达位置选择需考虑与监测目标的距离、监测范围,尽量设在相对稳定的区域,并考虑监测区域内有一定的GPS和测量机器人监测点,以便相互对雷达监测结果进行校准。基准站是整个矿区边坡表面位移监测的基础,为监测点提供高精度的数据及起算坐标,针对矿区的地形及实际情况,考虑通讯、电力、交通、人员等综合因素选取基准站位置。参考点按照监测区域的实际地形、开采方向、地下岩性等因素进行布设,选择相对稳定的区域,保证参考点所观测的监测点群均在监测区范围内。
2.2 形变监测数据采集传输网络的设计
形变监测数据采集传输网要解决形变数据的传输问题,主要将各种传感器采集的形变数据实时传输到数据处理中心(称为监控中心),后者将对采集数据进行自动分析,并报告形变监测结果。根据矿区边坡区域监测的范围和监控中心所在的地点,采用无线数据传输和有线数据传输两种方法来实现数据的传输:①无线传输。将监测区域各监测点的数据传递给串口服务器,然后再通过无线网桥的方式传递给数据中继中心,组成星型无线网桥连接方式,再将数据传给数据服务器。②有线传输。对传感器接收到的监测形变数据,通过光缆传输,通过串口将其转换为网络信号,通过网口传输到数据服务器,再进行解算,实现实时监测。有线数据传输网的数据传输稳定,数据传输量大,适合大区域长距离的数据传输,但投入较大,部署灵活性相对较差。设计中,将无线、有线相互结合,首先对传感器监测点采用无线接入,再对传感器采集的数据进行中继后,通过有线网传输到控制中心。
2.3 形变监测数据处理与分析系统
监测数据处理与分析是多传感器网形变自动化监测系统的核心组成部分,其分析结果关系到形变稳定性判断,并影响管理人员的决策。系统主要功能包括各传感器原始数据的采集后处理、数据检验及数据分析3个部分,数据采集后处理实现对数据传输网获取的数据进行初步转换处理(如坐标变换、数据格式转换等),数据检验主要对采集数据进行逻辑合理性判读和筛选,可以对明显错误数据进行去除,以免影响数据分析的结果。前两者都可以看成是数据分析的预处理工作,而数据分析部分实现监测数据解算及对解算结果的图形化展示,以实现形变分析和结果输出。数据分析的主要功能包括表面位移分析、形变速率分析、断面变形分析等。
3 应用实践
基于多传感器网进行矿区边坡形变监测的应用实践,通过GPS、测量机器人和微波雷达信号的有机融合和分析,实现对矿区边坡形变监测。
3.1 研究区概述
内蒙古大唐国际锡林浩特矿业有限公司东2号露天矿位于胜利煤田中东部,矿区面积49.63 km2,东西长约8.0 km,南北宽约6.6 km,主体构造形态为NE—SW走向,两翼不对称的宽缓向斜。2013年初东2号露天矿已形成南北宽约2.3 km,东西长约3.5 km,面积约7.5 km2的采坑,边坡高度202 m。随着东二露天煤矿进一步的开拓和延伸,南帮边坡稳定性成为制约其安全生产的重要因素。通过对传感器网的设计、传输网络的设计及监测数据分析系统的设计和实现,解决对该矿区边坡监测数据的实时分析和输出。根据传感器网的布局设计方法,得到如图3所示的传感器采集网,所有监测数据均采用UTM投影。
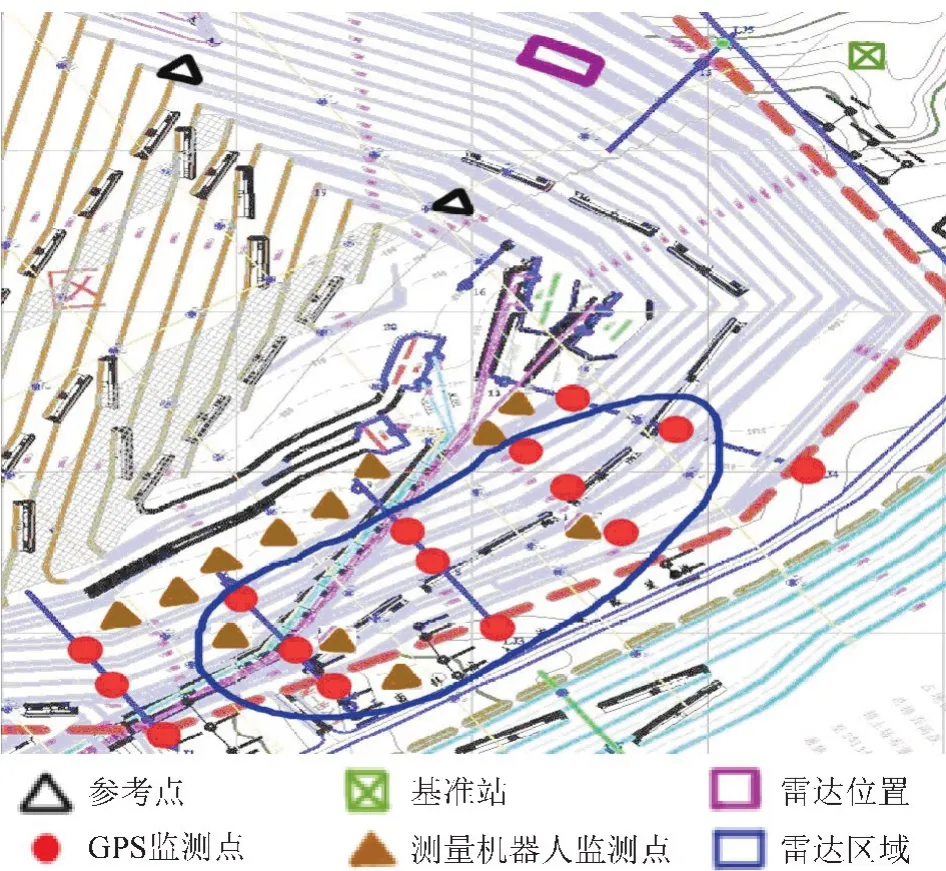
图3 传感器网的布设Fig.3 Layout of sensors network
3.2 基于多传感器网的数据采集及成图
由GPS数据采集点、测量机器人及微波雷达数据采集系统组成的多传感器网,覆盖了整个研究矿区范围,通过对数据点(GPS和测量机器人)和数据面(微波雷达)的边坡形变数据采集、传输,将这些形变数据通过数据传输网实时地写入数据库服务器,实现数据入库,GPS监测点和测量机器人监测数据和微波雷达数据点云,共同为监测区提供了形变动态信息,通过对3种传感器采集数据的空间坐标系统统一转换后,可对采集的数据点进行成图输出,特别是当采集多时态数据时,可以通过对监测采集点的空间插值、时间插值的方法,实现矿区形变监测的时序连续性和空间无缝性。
3.3 矿区边坡形变监测分析与结果
以监测区域内的某监测点为例,时间对位移量的变化曲线如图4所示,直观地显示了形变位移量随日期的变化过程,通过对日期的时间插值,可以计算出任意时间点该监测点的形变位移量,从而实现边坡形变监测的时间连续性。

图4 自动监测点位移-速度-加速度曲线Fig.4 Displacement-velocity-acceleration curves for a typical monitoring point
对形变监测数据的空间覆盖进行动态显示,图5显示了某一时刻下,基于多传感器网对该监测矿区进行的形变监测结果,包括GPS监测点、测量机器人监测点,及由微波雷达采集的监测点数据,各种传感器监测结果相互补充,完成覆盖整个区域的监测结果。对监测结果的离散空间点进行空间插值,可进一步形成覆盖整个区域的连续空间分布结果,从而实现对矿区监测的空间无缝性。
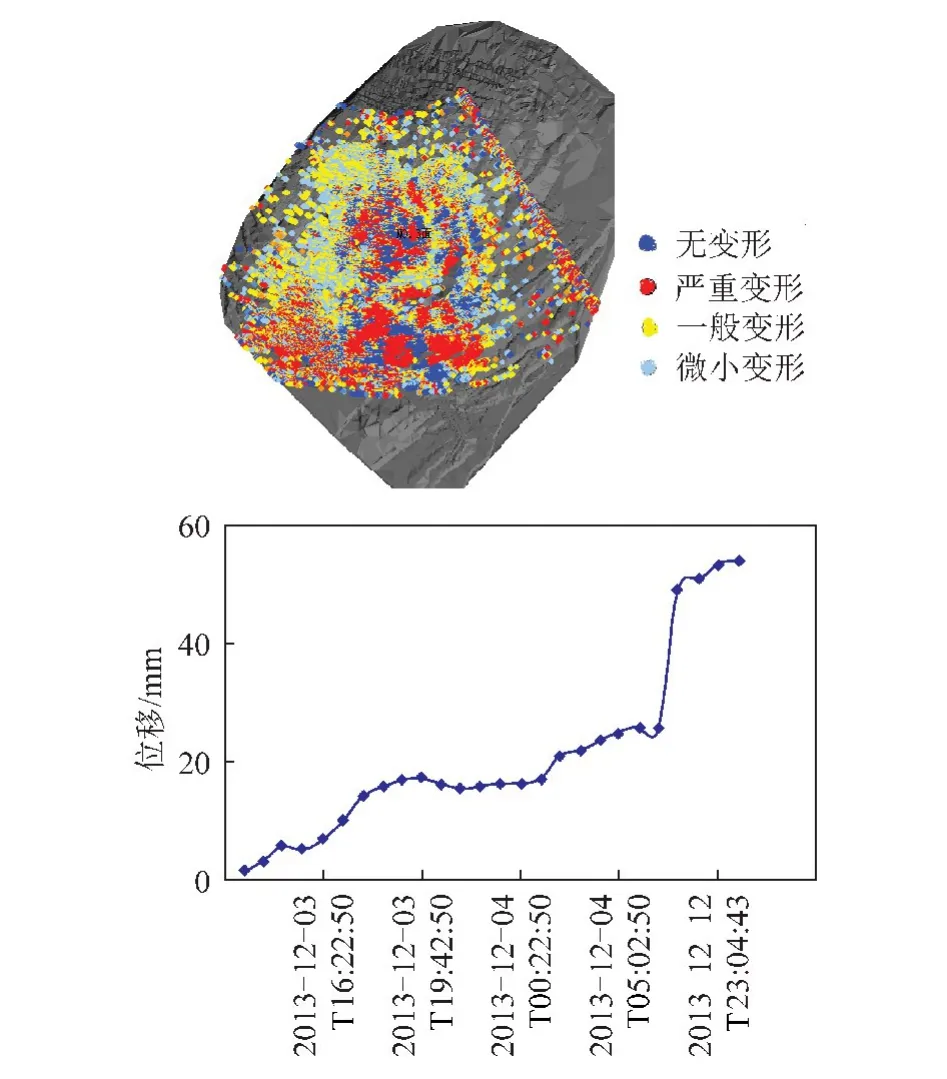
图5 雷达图像在监测软件平台中的显示Fig.5 Display of radar image in monitoring platform
利用时空插值分析模块,对利用多传感器监测网采集的数据点进行时空插值分析,可以实现任意空间、任意时刻的形变量,图6是某一监测时刻所获取的监测数据的空间插值结果,可以较直观地显示出目标监测区形变分级结果,表明整个监测区存在着正向(>0,地基下沉)和负向(<0,地基突起)的边坡变形,其中发生地基下沉主要发生在监测区的西部及中东部的零星区域。
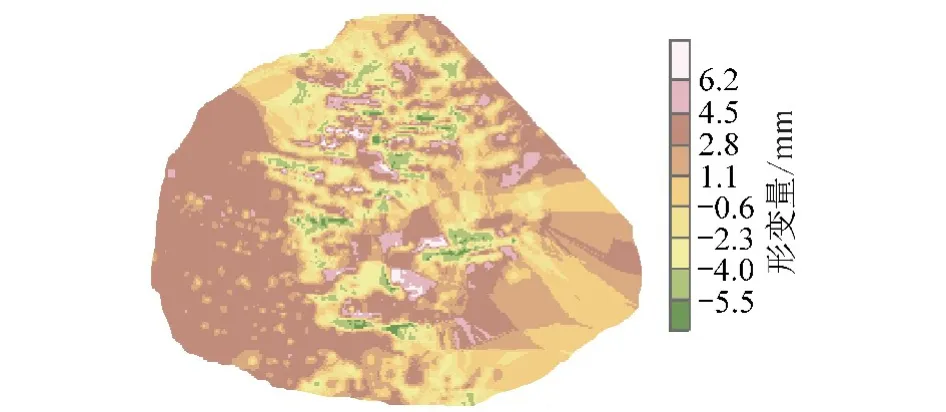
图6 基于空间插值的边坡形变结果Fig.6 Monitoring result based on spatial interpolation
此外,还实现了利用精度较高的GPS形变监测数据,对整个矿区边坡的形变监测的时空插值结果进行精度验证,来评价基于多传感器网的监测结果的有效性。通过对插值形变量与该点的观测形变量的相对差异平均值的交叉检验(式(4)),实践表明通过多传感器来进行边坡形变监测,其相对监测精度可以控制在5%(v<5%)以内,而采用单一的传感器(如微波雷达),其监测精度都在10%以外。因此,利用多传感器网数据融合和应用互补,来实现矿区边坡形变的监测,具有精度可靠性和自动化的优势[15]。
4 结 语
利用多传感器网进行矿区边坡形变监测可综合利用GPS、测量机器人及雷达测量的优势,多传感器自动监测系统具有的独特优势使其成为矿区边坡形变监测的重要技术途径。对多传感器网的形变监测数据的采集和融合进行分析,并设计相应的自动化监测系统的核心要件,包括传感器网、数据传输网及数据分析系统,满足矿区边坡形变监测的任务需求。利用设计的多传感器网数据采集和分析系统,对内蒙古锡林浩特胜利东2号露天煤矿边坡进行形变监测实践,表明多传感器露天矿边坡自动化监测系统具有高覆盖性、高可靠性、相互验证、优势互补等特点,验证了利用多传感器网进行形变监测时间连续性、空间无缝性和结果可靠性。后续研究可以结合边坡形变监测的时序特征及分析模型,对边坡的形变进行一定程度的预测分析。
[1] 范洪冬,邓喀中,祝传广,等.基于时序SAR技术的采空区上方高速公路变形监测及预测方法[J].煤炭学报,2012,37(11): 1841-1846.
Fan Hongdong,Deng Kazhong,Zhu Chuanguang,et al.Deformationmonitoring and prediction methods for expressway above goaf based on time series SAR technique[J].Journal of China Coal Society, 2012,37(11):1841-1846.
[2] 韩 雪.平庄西露天煤矿滑坡灾害远程监测实例分析[J].山东大学学报(工学版),2009,39(4):115-119.
Han Xue.Example analysis for landslide hazard remote monitoring at the Pingzhuang west open-pit mine[J].Journal of Shangdong University(Engineering Science),2009,39(4):115-119.
[3] 杨丽萍.准格尔黑岱沟露天煤矿内排土场边坡稳定性分析[D].阜新:辽宁工程技术大学,2006.
Yang Liping.Open pit slope stability analysis for Jungar Heidaigou area[D].Fuxin:Liaoning Technical University,2006.
[4] Francesca B,Paolo M,Alberto P,et al.Research and development of advanced technologies for landslide hazard analysis in Italy[J].Landslides,2010,7(3):381-385.
[5] 李如仁,王蕊秀,丁海鹏.地基SAR在边坡稳定性监测中的应用[A].第三届全国边坡工程学术研讨会论文集[C].长沙,2011.
Li Ruren,Wang Ruixiu,Ding Haipeng.Slope stability monitoring by Ground-based SAR[A].Proceedings of the 3rdNational Slope Engineering Conference[C].Changsha,2011.
[6] 王 鹏,周 校.地基雷达干涉测量原理及其变形监测应用研究[J].测绘信息与工程,2012,37(4):22-28.
Wang Peng,Zhou Xiao.Ground-based SAR interferometry principles and its applications to displacement monitoring[J].Journal of Geomatics,2012,37(4):22-28.
[7] 杨天鸿,张锋春,于庆磊,等.露天矿高陡边坡稳定性研究现状及发展趋势[J].岩土力学,2011,32(5):1437-1452.
Yang Tianhong,Zhang Fengchun,Yu Qinglei,et al.Research situation of open-pit mining high and steep slope stability and its developing trend[J].Rock and Soil Mechanics,2011,32(5):1437-1452.
[8] Ye X,Kaufmann H,Guo X F.Landslide monitoring in the three gorges area using D-InSAR and corner reflectors[J].Photogrammetric Engineering&Remote Sensing,2004,70(10):1167-1172.
[9] 张 祥,陆必应,宋 千.地基雷达差分干涉测量大气扰动误差校正[J].雷达科学与技术,2011,9(6):502-506.
Zhang Xiang,Lu Biying,Song Qian.Atmospheric disturbance correction in ground-based SAR differential interferometry[J].Radar Science and Technology,2011,9(6):502-506.
[10] 刘 超,高井祥,王 坚,等.GPS/伪卫星技术在露天矿边坡监测中的应用[J].煤炭学报,2010,35(5):755-759.
Liu Chao,Gao Jingxiang,Wang Jian,et al.Study on the GPS/ Pseudolites technology for the slope deformation monitoring in open-pit mine[J].Journal of China Coal Society,2010,35(5): 755-759.
[11] Canuti P,Casagli N,Emini L,et al.Landslide activity as a geoindicator in Italy:Significance and new perspectives from remote sensing[J].Environmental Geology,2004,45(7):907-919.
[12] 王金玲,张东明.空间数据插值算法比较分析[J].矿山测量, 2010(2):55-57.
Wang Jinling,Zhang Dongming.Comparative analysis of spatial interpolation[J].Mine Surveying,2010(2):55-57.
[13] 陈宝政,蔡德利.普通Kriging插值算法研究[J].测绘与空间地理信息,2009,32(3):7-9.
Chen Baozheng,Cai Deli.Study on spatial interpolation based on ordinary Kriging[J].Geomatics&Spatial Information Technology, 2009,32(3):7-9.
[14] 于 磊,赵君明.统计学(第2版)[M].上海:同济大学出版社,2003.
[15] 王军号,孟祥瑞.基于物联网感知的煤矿安全监测数据级融合研究[J].煤炭学报,2012,37(8):1401-1407.
Wang Junhao,Meng Xiangrui.Research on the data levels fusion of mine safe monitoring based on the perception of internet of things [J].Journal of China Coal Society,2012,37(8):1401-1407.
Open pit slope deformation monitoring based on multiple-sensors
REN Yue-long1,2,LI Ru-ren3,ZHANG Xin2
(1.School of Mines,China University of Mining and Technology,Xuzhou 221116,China;2.Inner Mongolia Datang International Xilinhot Mining Co.,Ltd., Xilinhot 026000,China;3.Institute for Space-Time Analysis and Modeling,Liaoning Technical University,Fuxin 123000,China)
Open pit slope deformation monitoring is an important topic in industrial mine work.Principal approaches such as robot,GPS and ground-based microwave radar are proposed but their integration keeps untouched so far.The integration of multiple sensors to realize automatic deformation monitoring system for open pit slope was proposed.The data fusion for multi-sensors and the systematic frame for the monitoring were illustrated.The proposed framework could benefit from the date complementary from the sensors and thus improved the effectiveness in slope monitoring.A case study was performed at the Shengli East II Open Pit Coal Mine.Radar data,robot data and GPS data were integrated through spatial registration of ground-based radar data.The results show that the multi-sensor system can continuous monitoring in time and space as well as high reliability in open pit mine slope deformation monitoring,providing a solution for slope deformation monitoring and forecasting.
multi-sensor;open pit slope;deformation monitoring
TD824
A
0253-9993(2014)05-0868-06
任月龙,李如仁,张 信.基于多传感器网的露天矿边坡形变监测[J].煤炭学报,2014,39(5):868-873.
10.13225/j.cnki.jccs.2014.0161
Ren Yuelong,Li Ruren,Zhang Xin.Open pit slope deformation monitoring based on multiple-sensors[J].Journal of China Coal Society, 2014,39(5):868-873.doi:10.13225/j.cnki.jccs.2014.0161
2014-02-17 责任编辑:王婉洁
国家自然科学基金重点资助项目(51034005);教育部博士点基金资助项目(20100095110019);煤炭资源与安全开采国家重点实验室自主研究课题资助项目(SKLCRSM10X01)
任月龙(1969—),男,内蒙古四子王旗人,教授级高级工程师。E-mail:dtgjxlhtky@163.com
