基于ADAMS的禽蛋吸运机械手仿真与分析
2014-05-11张兴国
张兴国
(南通大学 机械工程学院,南通 226019)
基于ADAMS的禽蛋吸运机械手仿真与分析
张兴国
(南通大学 机械工程学院,南通 226019)
0 引言
结合我国禽蛋生产企业分布广、规模小等现状,笔者设计完成一种占地面积小、适合于中小型禽蛋企业的禽蛋分拣系统,并就其中的禽蛋吸运分级机械手于本刊(见文献[1])发表相关研究成果。为了确保机械手工作的安全性、稳定性,优化其轨迹规划,基于ADAMS对该机械手进行了仿真分析研究。
1 禽蛋吸运分级机械手简介
禽蛋吸运机械手采用关节式结构,图1为其示意图,设计有5个自由度,分别为:2个肩关节(J1、J2)、1个肘关节(J3)和2个腕关节(J4、J5)[1~3]。表1为设计参数。

图1 禽蛋吸运机械手
2 禽蛋吸运机械手运动学分析
采用工业机器人分析中常用的D-H法建立禽蛋吸运机械手的连杆坐标系[4~6],如图2所示。表2为各关节的转角、扭角等参数。

表1 禽蛋吸运机械手设计参数

图2 禽蛋吸运机械手关节坐标系
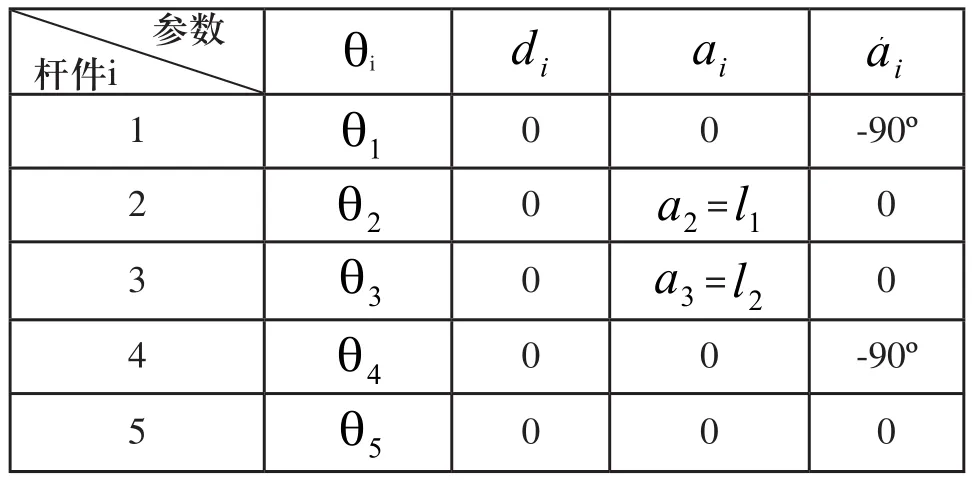
表2 禽蛋吸运分级机械手杆件参数和关节变量
2.1 运动学正问题

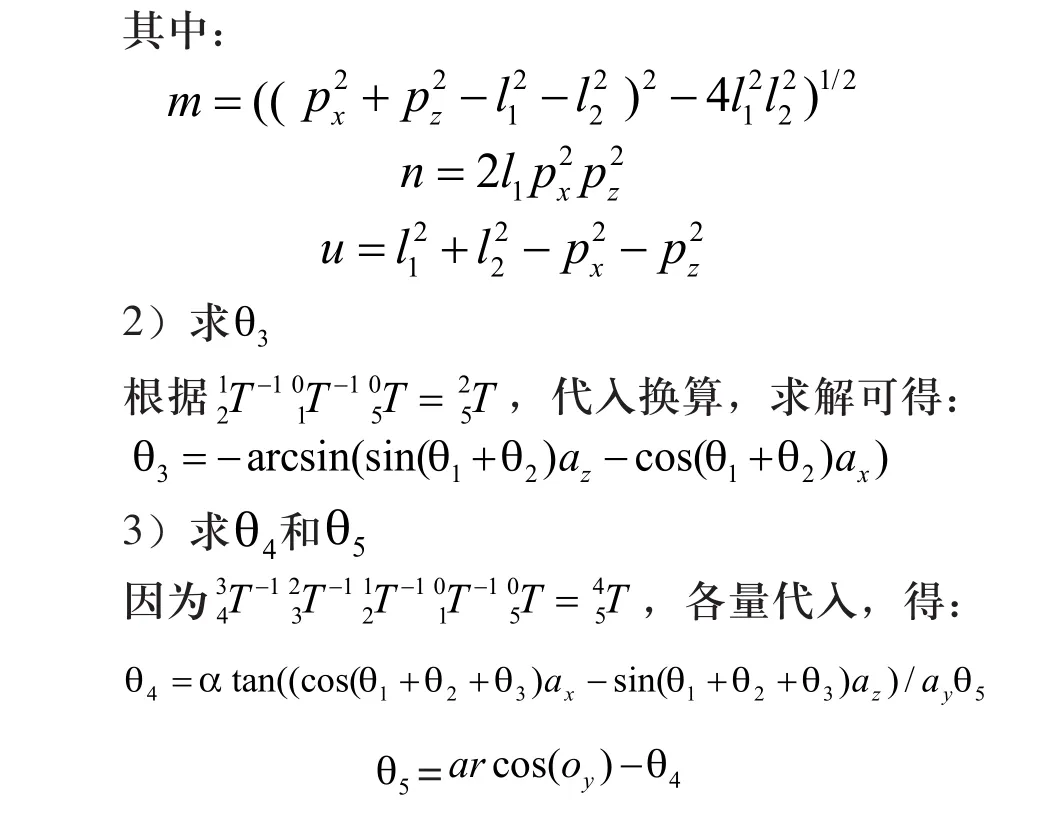
2.2 运动学逆问题

3 基于ADAMS的禽蛋吸运机械手三维建模
ADAMS是以计算多体动力学为基础,包含多个专业模块和领域的虚拟样机开发系统软件。可以建立复杂的运动学和动力学模型(包括刚性、柔性以及刚柔混合)。在产品的设计阶段用ADAMS进行辅助分析,可以在制作样机前对产品进行各种性能测试,大大降低研发成本,缩短开发周期[7]。
3.1 ADAMS建模的主要流程
对禽蛋吸运机械手的建模及分析,只用到了ADAMS的通用分析部分。主要包括实体模型建立、运动副添加、工作过程中阻尼的添加和驱动的选取。最后通过一系列运动学和动力学数据的输出来判断虚拟样机的工作状况,作为检测标准的重要参考[8,9],具体的主要设计流程如图3所示。

图3 运用ADAMS设计流程
3.2 基于ADAMS的机械手建模
3.2.1 三维模型建立
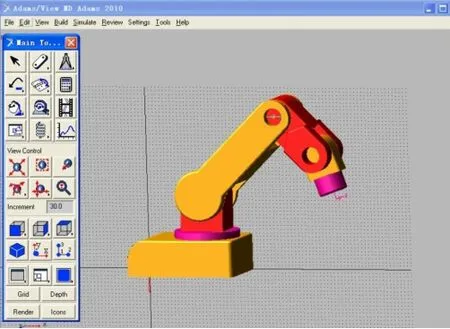
图4 ADAMS中禽蛋吸运机械手三维模型
ADAMS/View中可以直接创建没有质量信息的构造体,例如起辅助作用的点、线、坐标系等,同时也可以构建有质量信息的具体几何实体。虽然其他三维造型软件如SolidWorks、Proe等拥有强大的建模功能,也可用通用格式导入到ADAMS,但是由于受到通用性的限制,且经过实践操证实导入操作得到的模型经常会出现位置、精度和尺寸变化不同等错误,所以采用了ADAMS的内部自带工具进行菜单建模。
机械手主要包括底座、旋转台、大臂、小臂、手腕。由上述机械手运动学分析的结果为基础,构建机械手对象。机械手可以视为连杆通过关节组合而来,相邻杆件间的转动或移动可以通过矩阵变换加以描述。图4为在ADAMS中所建的机械手三维模型。
3.2.2 机械手刚体参数信息
ADAMS提供了丰富的建模工具集及各种布尔操作,并且可以对模型进行参数化修改,构建的编辑信息主要包括外观、质量、初始位置和运动速度等。
表3中是分析得到的主要构件的质量和转动惯量等信息。查阅大臂和小臂的相关信息,进行初步检查,以确保材料、初始位置等相关参数设置的合理性和正确性。

表3 机械手的主要部件质量和转动惯量
3.2.3 约束和驱动等相关设置
该禽蛋吸运机械手拥有5个转动的自由度,底座固定于操作台上进行工作。机械手只有5个转动副可以运动,其中底座与转动支架相连构成的转动副的轴线与水平面垂直,手腕与吸附机构的组成的转动副轴线方向是变动的,其他三个转动副都是与水平线平行。
1)驱动的添加:机械手的5个关节各有一个转动副,都由不同型号电机作为驱动,进行运动的仿真时驱动的添加是首要环节,也是保证机械运动符合预期要求的关键步骤,具体的各个关节定义如表4所示。

表4 各转动关节定义
本文通过各个关节的轨迹数据在ADAMS中生成关节转角的样条曲线,将曲线参数通过CUBSPL引用样条曲线函数,添加至相应的关节位置作为驱动。其采用的是标准的三次样条差值来计算,所以得到的结果更容易收敛。此处仿真的运动轨迹模拟了一次完整的从禽蛋吸取到放置的过程。
2)角度范围传感器的添加:根据表1中的各个关节可以活动的范围,为保证机械手臂在运动过程中不会超过预定的角度,要对各关节转角添加角度传感器。添加的角度传感器可测量关节的转动角度,并当运动角度达到预定值时,转动副运动将会受限,且暂时停止仿真,从而避免仿真失真及后期的规划错误。
底座旋转支架和手腕部分的吸附机构旋转,可不进行限制,所以此处只添加3个角度传感器,分别是大臂关节转角、小臂的关节转角和手腕位置的关节转角,具体信息如表5所示。

表5 传感器角度设置
3)关节阻尼的添加:机械手在运动过程中会产生各种摩擦,所以在完成运动副的设置以后,要在关节处添加摩擦以确保仿真的可靠性。综合其他类似设计经验,此处各个关节设计的最大静摩擦系数为0.5,并用同样的方法添加其他位置的摩擦力。
4)检验样机模型:完成上述步骤后,开始分析前还要对构件的虚拟样机进行最后的检验,来排除其中可能存在的一些错误,例如连接约束不当、装配错误、构件未添加质量信息等,保证仿真的顺利进行。
4 基于ADAMS的机械手仿真与分析
机器人的轨迹规划是研究末端执行器工作过程中在空间内所经历的连续轨迹变化状态,主要从两个角度讨论,一是研究末端位置的空间直角坐标变换,另一种是研究关节转角的变换情况。这里主要讨论的是后一种情况。
4.1 ADAMS的机械手仿真与分析
在已经建立好的ADAMS机械手三维模型基础上,完成相关仿真参数设置,然后将关节转角参数导入至各个对应的关节进行驱动的设置,以实现机械手的正运动学与动力学分析。
Prostprocess作为ADAMS的后处理模块,不仅可输出质量、尺寸和受力等静态信息。同时也可显示仿真动画,并输出速度、加速度、坐标轨迹和力矩等结果,以方便于将仿真结果与理论计算进行对照和验证。图5为机械手运动过程仿真图,图6~图11为机械手的部分仿真分析结果。

图5 ADAMS内机械手运动过程仿真

图6 末端执行器(吸盘)的坐标变化曲线

图7 末端执行器(吸盘)的速度变化曲线
由图6和图7中可见,末端轨迹在三个坐标上的变化都比较平稳,没有出现较大的波动和震荡。并且末端在各坐标上的速度分量也变化缓慢,符合吸附装置在运送蛋的过程中对速度的要求,不会使得禽蛋因为振动而坠落,整体符合要求。
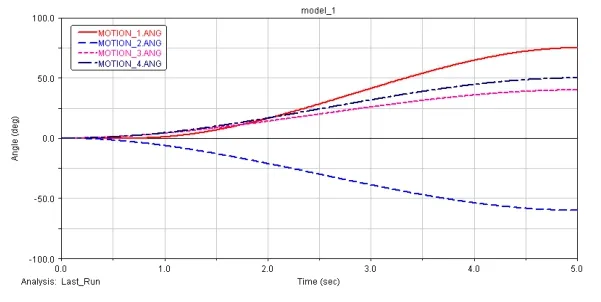
图8 各关节转角变化曲线
而对于图8中的各关节转角变化曲线,可见其变化规律与驱动的添加规律相符合,说明机械手各关节的转动都在相应角度传感器的范围以内,没有超出角度要求,符合设计要求,否则会出现检测的结果角度与添加不同的仿真报警。

图9 大臂电机转矩变化曲线
图9为机械手大臂电机转矩变化曲线,可见大臂驱动力矩由大变小,最大值约为530Nm,小于结构设计中电机选型时理论最大值。大臂转矩从大至小变化,是由于大臂初始位置与水平方向夹角小接近平行,此时大臂受到小臂和末端负载的负载力矩大。当机臂吸附起禽蛋后,手臂向上抬起过程中,大臂与水平方向夹角增大。夹角增大使得小臂对大臂与机身连接处的作用力臂减小,因而力矩减少。
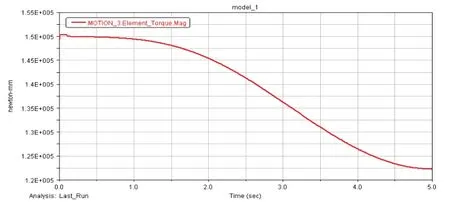
图10 小臂电机转矩变化曲线
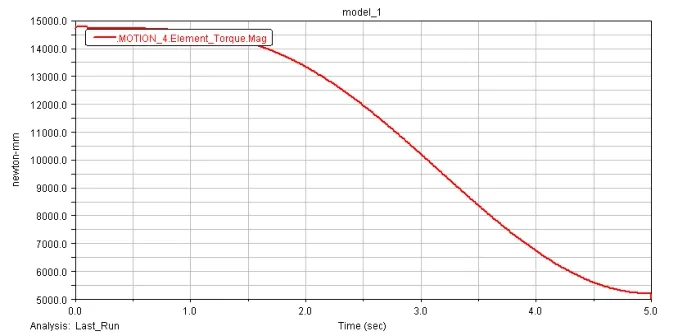
图11 手腕电机转矩变化曲线
小臂在仿真过程的驱动力矩变化规律与大臂相似,具体如图10所示,从图中可知最大值为134Nm,也小于小臂电机理论最大值,符合预期要求。
图11中,手腕驱动关节的最大力矩约为14.8Nm,略大于电机选型时的计算值14.4Nm,此关节的电机选型基本满足。
5 结束语
在简要介绍禽蛋吸运机械手结构基础上,完成了连杆坐标系建立、运动学问题分析等工作。结合机械手参数,在ADAMS中构建机械手三维模型,并实现机械手的运行过程仿真,得到相关位移、速度、力矩等信息和工作状态,经与理论值对比分析,以验证机械手臂设计的正确性,及时发现不足之处予以改正,同时也为后续运动控制及机器人路径规划提供模型,从而更好发挥该机械手的工作性能。
[1]张兴国,倪远征,张磊.禽蛋吸运分级机械手设计及研究[J].制造业自动化,2011(7):1-4,53.
[2]马香峰.工业机器人的操作机设计[M].北京:冶金工业出版社,1996.
[3]吴振彪.工业机器人[M].武汉:华中理工大学出版社,2006.
[4]张兴国.环保压缩机装配机器人的运动学分析[J].南通大学学报(自然科学版),2004(1):32-34,38.
[5]张兴国,徐海黎.FANUC M-6iB型工业机器人结构及运动学分析[J].南通大学学报(自然科学版),2009(1):9-12.
[6]周东健,张兴国,马海波,等.基于栅格地图-蚁群算法的机器人最优路径规划[J].南通大学学报(自然科学版),2013,12(4):82-86.
[7]李增刚.ADAMS入门详解与实例[M].北京国防工业出版社,2010.
[8]伟光,刘建华.基于ADAMS的工业机器人大臂运动关节分析[J].机械与电子,2010,(5):67-69.
[9]郁飞鹏,贾鸿社.ADAMS与UH、SolidWorks的数据交换实践[J].现代制造工程,2005,(10):37-39.
simulation and analysis of grading robot for eggs suction and transportation based on ADAMs
ZHANG Xing-guo
在简要介绍禽蛋吸运机械手结构基础上,完成了连杆坐标系建立、运动学问题分析等工作。结合机械手参数,在ADAMS中构建机械手三维模型,并实现机械手的运行过程仿真,得到相关位移、速度、力矩等信息和工作状态,经与理论值对比分析,以验证机械手臂设计的正确性,及时发现不足之处予以改正,也为后续运动控制及机器人路径规划提供模型。
吸运机械手;禽蛋分级;坐标系;运动学方程;ADAMS;仿真与分析
张兴国(1975 -),男,江苏沭阳人,副教授,硕士,主要从事光机电一体化及机器人技术方面的教学和科研工作。
TP242
A
1009-0134(2014)05(下)-0123-05
10.3969/j.issn.1009-0134.2014.05(下).35
2014-01-24
江苏省自然科学基金面上项目(BK20131205)
