基于视觉的装配机器人精确定位研究
2014-05-11刘振国曹云翔刘晓楠唐海林
郭 瑞,刘振国,曹云翔,刘晓楠,唐海林
(北京机械工业自动化研究所,北京 100120)
基于视觉的装配机器人精确定位研究
郭 瑞,刘振国,曹云翔,刘晓楠,唐海林
(北京机械工业自动化研究所,北京 100120)
0 引言
装配机器人在制造业中占有越来越重要的地位,传统的装配机器人在自动化生产线上,只能执行固定的示教位置,机器人的抓取点固定,对定位工装精度要求就很高,同时需要精心设计手爪及特殊辅助机构[1]。但在实际应用中,因工装材料(如泡沫等)、加工工艺、工件本身精度以及为机器人手爪抓取工件预留的公差裕量等原因,使得抓取精度无法满足精密装配要求,视觉的引入可以使机器人根据工件的实际位置动态调整抓取点,实现装配机器人精确定位和智能抓取[2]。
1 系统组成及通信方式
本文构建了一套以视觉为引导的机器人精密装配系统,本系统由输送线体、定位工装、四轴机器人、专用电缸手爪和视觉系统等组成。相机采用移动式安装,固定在机器人手爪上跟随手爪移动,机器人手爪结构如图1所示,两台相机平行安装并且垂直于水平面,只用其中一台相机定位。

图1 机器人手爪结构示意图
本系统通过PLC进行系统集成,实现系统控制,不同设备支持的通信协议(工业以太网、PROFIBUS等)不同,具体的通信方式需要根据实际情况选择。对于机器人与视觉系统的交互方式,主要有以下两种:
1)机器人与视觉系统直接通信。机器人与视觉系统构建一个子系统,机器人直接获取视觉系统的数据信息,PLC只与机器人通信,不再与视觉系统通信,当PLC需要视觉信息时,可经由机器人反馈获取。该方式的优点是减少通信中间环节,使通信更加直接可靠。
2)机器人通过PLC与视觉系统间接通信。首先PLC把视觉系统传送的数据信息进行分析,然后把机器人需要的信息转发给机器人。该方式的优点是便于PLC分析视觉信息做出整体的控制调配。
本系统因需要进行工件定位、判断有无、正反以及检测等大量数据分析,所以选择了第2种通信方式。
2 系统定位工作流程
系统定位工作流程如图2所示。
3 精确定位关键技术
3.1 图像处理
原始图像质量的优劣直接影响着图像数据分析的准确性,进而影响定位精度。在保证环境光源稳定、背光[3]调节适当的情况下,充分利用曝光调整、图像预处理、图像二值化处理、模型区域识别和特征点寻找等方法分析图像信息。本例中工件为深棕色,嵌在泡沫工装中,图3为图像二值化处理的效果。

图2 系统定位工作流程图
3.2 坐标系标定
视觉系统从拍摄的图片中提取出来的信息为像素点信息,在保证相机视野和机器人法兰都在水平面的前提下,视觉系统的二维坐标系需要转换成机器人的二维坐标系,转换的过程即为坐标系标定。视觉系统的像素点坐标为当前物距下的坐标,而机器人坐标为机器人法兰中心点的坐标。


图3 图像二值化处理效果图
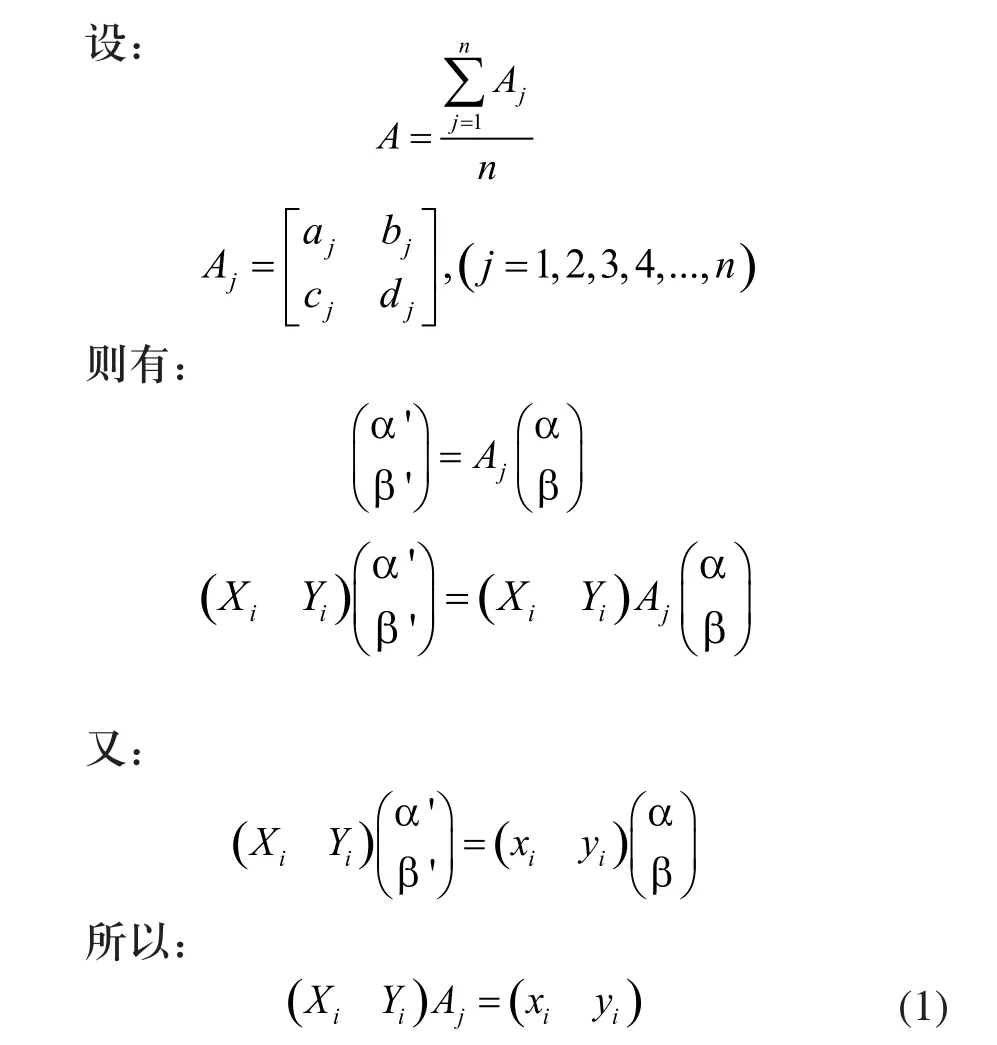
从上推理可知,将任意两组视觉系统坐标系和机器人坐标系的坐标值带入式(1)即可求出Aj,然后采集n组Aj得到A,理论上n越大,得到的A越精确。
至此,视觉系统中任意像素点坐标已经转换为机器人X、Y轴坐标。

图4 机器人手爪中心轴顶针对点
3.3 机器人抓取点获取
坐标系标定完成后,相机视野内寻找的工装或工件上的特征点均可以在机器人坐标系下给出坐标值,根据视觉系统坐标系下特征点的坐标值,进行抓取点x、y轴坐标值和角度补偿计算,然后再转换为机器人坐标系下坐标值,模型如图5所示。
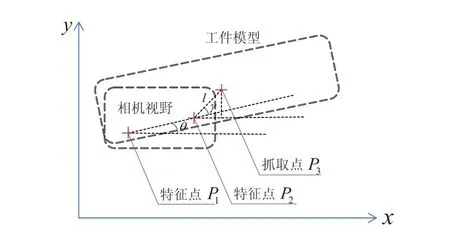
图5 抓取点坐标值及角度补偿计算示意图
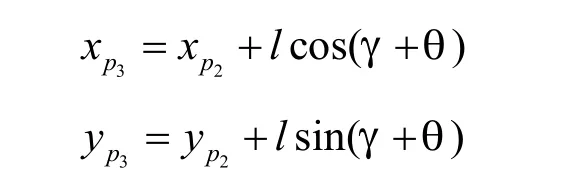

对于机器人手爪角度补偿,因相机固定在手爪上且视觉系统坐标系x轴方向与手爪夹取方向平行,所以两特征点连线与x轴方向的夹角即为机器人抓取角度的偏移量补偿,设拍照点机器人R轴(机器人法兰旋转轴)角度坐标值为φ,机器人抓取点角度值为λ。则有:

4 结论
通过视觉系统对工件的精确定位,引导机器人智能抓取,较好的解决了定位工装达不到精度要求的问题,提高了设备的智能化水平和容错性能力。经过视觉算法的反复验证,视觉系统与机器人之间的坐标系标定和抓取点坐标值计算可靠有效,工件的抓取精度和稳定性可以保证。
[1]张建中,何永义,李军.机器人装配视觉定位研究[J].机电工程,2011,28(8):934-937.
[2]王修岩,程婷婷.基于单目视觉的工业机器人智能抓取研究[J].机械设计与制造,2011,5:135-136.
[3]顾寄南,樊帆,关号兵,陈艳,沈巍.上下料机器人视觉控制系统的研究[J].机械设计与制造,2013,8:150.
Research on assembly robot accurate positioningbased on vision
GUO Rui, LIU Zhen-guo, CAO Yun-xiang, LIU Xiao-nan, TANG Hai-lin
为适应越来越高的自动化装配精度要求,以视觉为引导的机器人装配系统更多的被应用,本文阐述了机器人精密装配系统的系统集成、设备通信的实现方式,介绍了图像处理一般方法,设计了视觉系统到机器人的坐标系标定及坐标值计算,实现了视觉系统对机器人精确定位的智能引导。
视觉;装配机器人;精确定位;图像处理;坐标系标定
郭瑞(1988 -),男,山东临沂人,硕士,研究方向为工业自动化系统集成。
TQ116.2
A
1009-0134(2014)05(下)-0154-03
10.3969/j.issn.1009-0134.2014.05(下).44
2014-04-21
