一种球形载人娱乐车*
2014-04-16陈永当黄国建王俊峰
□ 李 鹏 □ 陈永当 □ 金 京 □ 黄国建 □ 王俊峰
西安工程大学 机电工程学院 西安 710048
人类已开发出各种运载器具,如地面上运行的车辆,水面上行驶的船舶,这些器具都有一定的缺陷,如在运行时会出现倾覆现象,对崎岖不平的路面适应性差,不能实现没有转弯半径的方向变化,在与外界物体碰撞或急刹时,所载人或物可能发生由于惯性力而造成的硬伤害。因此,人们一直在探索一种能克服以上缺点的运载器具。
球形运载器是一种点接触的新型载具,能够较好克服传统载具的缺点。现有球形载具虽方案多样,但大都存在着结构复杂、工程实现较难、实用性较低、球体质心较高使爬坡和越障能力不足等问题。有的不能改变球形装置的运动方向,有的虽能改变运动方向,但要求两电机必须分别克服球壳的转动惯量和重物的转动惯量,因而对电机力矩的要求较高,能耗高。现有的球形机器人只具备运动能力,而没有对外操作能力[1],基本上不具备负重载人的功能,实用性较差,在很大程度上限制了该类运载器具的推广应用。
本设计旨在克服上述缺点,开发一种结构简单、操作方便、具有负重载人功能、充满休闲娱乐趣味、实用价值强的球形娱乐车,与常见的轮式、履带式和腿式球形车相比,球形娱乐车的最大特点是其特殊的外形和运动方式,球形外壳使其自身在失稳后能经过短暂的调整迅速恢复到稳定状态,因此不怕翻车[2]。
1 总体结构设计
该娱乐车主要包括球形外壳、驱动装置和转向装置,总体结构如图1所示。操作者坐在座位上,通过操作控制手柄实现球体的运动及制动,通过操作转向手柄控制球体的运行方向。球壳采用亚克力材料制作,具有较高的透光度、良好的抗冲击性和一定的弹性,既美观又安全。
驱动部分由直流电机、同步带传动机构及与球壳内壁接触的驱动轮组成,电机带动传动机构,使驱动轮相对球壳转动,利用反向力矩使球壳直线滚动。转向装置主要由重力小车、方向盘、弧形轨道组成,方向盘与重力小车用链条连接。行驶中,驾驶者通过对方向盘的操控使重力小车左右移动,使其质心在其球壳内偏移,从而实现球体在前行过程中的左右转向,支架采用轻质的铝合金材料制作。
1.1 球壳设计
球形外壳由球壳、关节轴承、套杆组成,如图2、图3所示。外壳用亚克力材料,采用吹塑成型工艺制成,将两个半球用高性能粘胶剂粘接而成。为了便于人进出,在图2所示右侧开一个方形的侧门。整个球壳以合缝线为中心,与地面滚动接触,为保证球壳与地面的接触强度,侧门离合缝线要有一定的安全距离,应在不小于10 cm处开设。当驱动轮转动时,在反向力矩的作用下,球壳会在总体部件质心偏移的情况下绕关节轴承转动,从而将内部的驱动转为外部的转动。

▲图1 娱乐车总体结构示意图

▲图2 球壳

▲图3 关节轴承与套杆

▲图4 底架及驱动电机

▲图5 弧形同步齿形带轨道
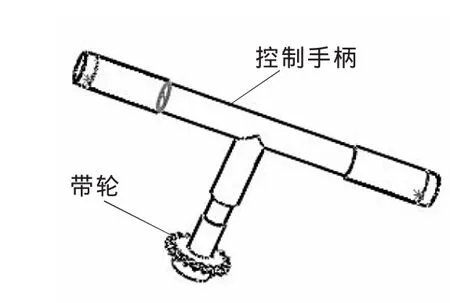
▲图6 控制手柄

▲图7 链传动支架
为了确保驱动轮与球壳内壁始终保持无干涉的高副接触,采用关节轴承与伸缩套杆组合结构,构成了全方位的游动、悬挂支承,以降低制造装配的尺寸精度。关节轴承一端与球壳通过螺纹连接,另一端通过套杆与内部底座连接。球壳质量约为79.4 kg,设计承载能力为60 kg,整个娱乐车的质量约为165 kg,为增加球壳内壁的支撑强度,在球壳内壁与关节轴承连接处有两个圆柱面,粘贴在球壳内壁上,提高安全性。
1.2 驱动设计
驱动装置由电机、底架、驱动轮、弧形同步齿形带轨道等部分组成,如图4、图5所示。选用120 W的直流电机,当电机工作时,通过带传动带动驱动轮转动,致使驱动部分沿球壳内壁向前滚动,整体质心向前偏移,从而达到使球壳向前转动的目的。
采用电池作为电机的电源,球壳的转速是由驾驶者通过操作手柄调节电机的转速控制,类似于电动摩托车。底盘由铝合金材料制成,底盘的前后有两个弧形轨道,在弧形轨道上安放同步齿形带,通过改装同步齿形带,使传动更精确,有效防止了其上座椅部分的前后摆动。中间的一对弧形轨道,主要用于防止座椅左右滑动时冲出底座。
采用柔性部件组合,使整个装置约束严密却又不失灵活,球形娱乐车平面运动系统为一个欠驱动系统,也是一个非完整系统[3]。底座的高度比球心的高度低,因此运动时不会翻车,本作品是类似不倒翁的移动载体[4]。
1.3 转向原理
转向装置由控制手柄、带轮、链轮和链条等零部件组成,
如图6、图7所示。当转动控制手柄右半部分时,电机通电启动,实现驱动轮的转动,从而控制整个装置的前进和后退。当左右转动控制手柄时,在扭转力矩的作用下,带动链传动支架上(图7)的链轮转动,在链传动支架上布置有链条,通过链条带动底座上的链轮转动,链轮固定在一根轴上,底座前后弧形轨道各有一个同步齿形带,同步带轮在带上转动,通过这根轴使两带轮作同步运动。
通过小车左右移动改变座椅及人的质心,进而改变球体质心的位置[5],实现球壳转向。球壳转弯半径的大小是由小车左右移动量的大小来控制,由于内部质心略有偏移,球壳就会顺势偏转,因此转弯半径非常小,操作起来十分灵活。
2 总结
2.1 主要创新点
(1)球形娱乐车的质心始终低于球体中心,从而使其内部的机座始终处于稳定平衡状态,因此在复杂运动状态下都不会翻车。
(2)外形是一个球形的壳体,与地面及外界物体始终为点接触,从而使其在转向时转弯半径非常小(小于球壳直径),摩擦阻力小,能耗低,环保节能,并且与外界物体碰撞时的抗冲击性和安全性极高。
(3)球壳与车身之间,通过关节轴承与轴套的巧妙组合,构成了全方位的游动、悬挂支承,以确保驱动轮与球壳接触同时具有很强的自适应调整性能。
2.2 应用推广
本作品变传统的平面运动为滚动,将难以控制的球形运动变得简单、可靠、安全,尤其在大直径、载人负重及实用性方面的独特设计,使其具有良好的推广应用价值。目前是针对儿童开发的一款娱乐车,突出趣味性、安全性和可操控性,强调的是新概念、新感觉。但它更具有极强的二次开发性,根据需要完全可制成有人、无人控制;机控、电控;水、陆两栖;运载、探测;平时、战时等各种装置,应用前景十分广阔。
[1] 孙汉旭,郑一力,贾庆轩,等.带可伸缩操作臂的球形机器人的研制[J].机器人,2009,31(5):404-409.
[2] 董荣俊.一种新型球形机器人的设计与实现[D].南京:南京航空航天大学,2009.
[3] 肖爱平,孙汉旭,廖启征,等.一种球形机器人的运动特性分析[J].机电产品开发与创新,2005,18(1):1-4.
[4] 王广,莫锦秋.全对称球形机器人的设计及动力学分析[J].上海交通大学学报,2007,41(8):1271-1275.
[5] 李鑫勇,王彪,郝少楠.电磁驱动结构的球形机器人研究[J].机械设计与制造,2010(5):169-170.
[6] 孙琪,张越.基于ADAMS的某球形机器人运动分析[J].科学技术与工程,2010,10(15):3599-3601.
[7] 朱超.具有稳定平台的全向滚动球形机器人研究 [D].西安:西安电子科技大学,2005.
[8] 王亮清,孙汉旭,贾庆轩.球形机器人的圆周运动分析[J].机器人,2007,29(1):56-60.
[9] 叶长龙,马书根,回丽.一种全方位移动机器人[J].中国科学,2011,41(2):181-189.
[10]王佳,胡侠,柳洪义.球形管道机器人设计[J].机械设计与制造,2006(12):133-135.
[11]王迎春.一种球形月球探测机器人的机构设计与路径规划研究[D].北京:北京邮电大学,2010.
