基于ADAMS的PUMA560的运动学分析及仿真
2014-04-16张永贵王得蛟张秀林
□ 张永贵 □ 王得蛟 □ 张秀林
兰州理工大学 机电工程学院 兰州 730050
焊接加工一方面要求工人有熟练的操作技能、丰富的实践经验和稳定的焊接水平;另一方面,工作的劳动条件差、烟尘多、热辐射大、危险性高。当焊缝为复杂曲线时,人工焊接质量就会下降,所以,在焊接生产中利用焊接机器人代替人工焊接,可减轻工人的劳动强度,保证焊接质量和提高焊接效率[1]。为保证焊接质量,研制时需对其进行轨迹设计和运动学分析,机械手的运动学模型是其运动规划和离线控制的基础[2,3]。基于上述分析,本文首先以PUMA560机械手为研究对象进行运动学研究分析,然后建立该机械手末端位姿数学模型,进行仿真实验研究,证明模型的准确性。
1 基于PUMA560机械手的运动学分析
1.1 机械手运动学
机械手运动学是避障路径规划研究的基础,主要研究机械手臂各杆件之间的位移、速度和加速度关系,运动学问题包括正运动学问题和逆运动学问题[4]。正运动学问题是指给出机械手各关节的位置、速度、加速度,求解各杆件的位置、姿态、速度、加速度等运动参数的问题,特别是求解机械手手臂端点(或末端杆件)的位置、姿态、速度、加速度[5]。 逆运动学问题是已知工作所要求的末端执行器的位置、姿态、速度、加速度时,求解能实现这些要求的机械手各关节的位置、速度、加速度等运动参数[6]。
1.2 建立机械手末端位姿数学模型
PUMA560机器人本体关节结构由回转的机体、肩、大臂、小臂、腕部及机械手部分组成。
所以该机器人共有6个关节自由度,如图1机器人实体模型所示,其中前3个关节主要影响末端执行器的位置,后3个关节决定末端的姿态,而且6个关节均为旋转关节,属关节型机器人。

▲图1 PUMA560的实体模型
通过机构分析,建立了PUMA560的简化模型,如图2所示,为了进一步分析研究,对已建立的简化模型进行坐标分析研究,如图3所示。同时为了更加有效地实施动力学分析,确定了各参数,见表1。
图中:a2=431.8 mm,a3=20.32 mm,d1=660.4 mm,d2=149.1 mm,d4=433.1 mm,d5=56.25 mm, d6=80.31mm。
1.3 基于已建立模型的运动学分析
1.3.1 正运动学分析
基于D-H方法[7],表示初始连杆坐标系与上一连杆坐标系之间的关系,相邻两连杆的空间关系矩阵为连杆变换矩阵,建立的齐次变换矩阵如下:

式中:c 为 cos;s为 sin;ai为 Zi-1到 Zi沿 Xi-1测量的距离;αi为 Zi-1到 Zi绕 Xi-1旋转的角度;di为 Xi-1到 Xi沿Zi测量的距离;θi为Xi-1到Xi绕Zi旋转的角度。

▲图2 PUMA560简化模型

▲图3 PUMA560机器人的坐标

表1 PUMA560机器人的连杆参数

已知6关节机械手运动方程为:
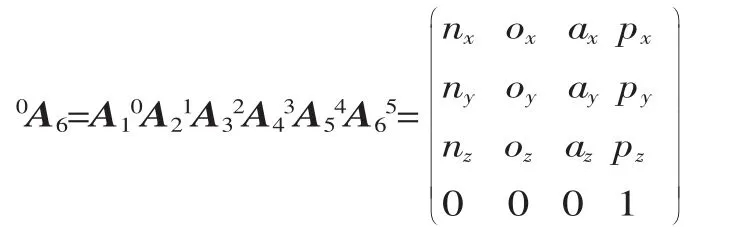
式中:n、o、a 为旋转矢量;p 为平移矢量。
则通过以上的相邻连杆的变换矩阵,得出坐标系6相对于基坐标系0的变换矩阵为:

由此可知与图3所示的情况完全一致。
机械手末端相对于基座标的位姿为:

那么机械手末端在ADAMS坐标系中的位姿为:
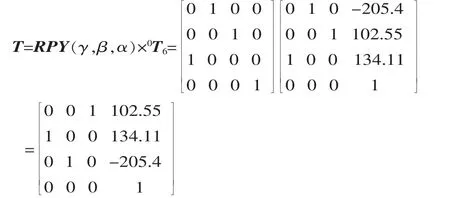
令肩关节绕Y轴旋转-90°,小臂关节绕X轴旋转90°,其它的关节不旋转,得到机械手末端在ADAMS坐标系中的位姿为:
1.3.2 逆运动学分析
已知机械手末端的位姿0T6,求解各关节变量θi=(i=1,2,3,4,5,6)。 对0A6式两边依次左乘 A 的逆矩阵,并使两端相等矩阵的对应元素相等,可求出各关节变量:
θ1=arctan(px/py)或 θ1=arctan(px/py)+180°令:s234=sin(θ2+θ3+θ4);c234=cos(θ2+θ3+θ4);θ234=θ2+θ3+θ4;c1=cosθ1;c3=cosθ3;s1=sinθ1;s3=sinθ3。
则有:

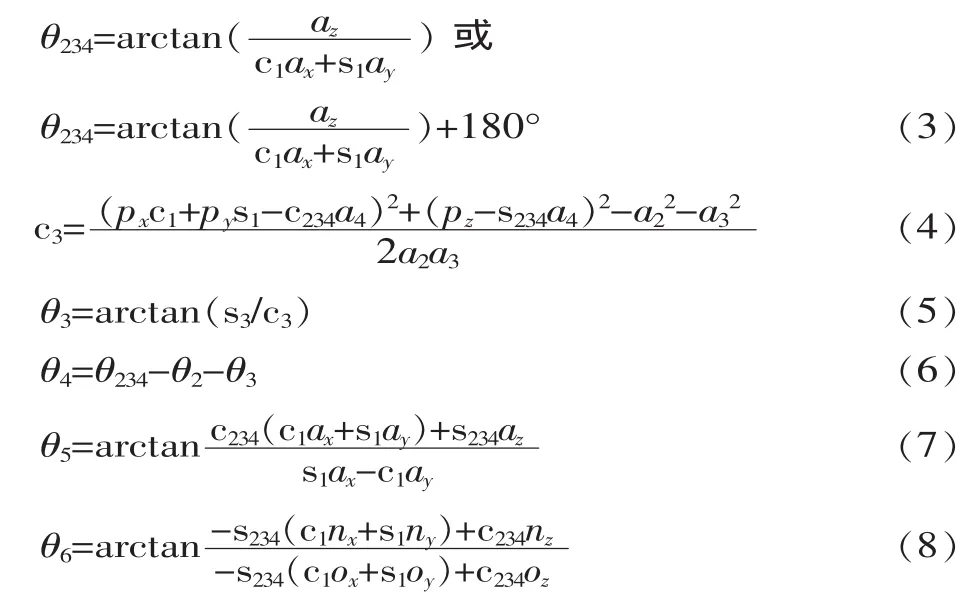
综上分析PUMA560的运动反解可能存在8种解。限于本身结构限制,机械手各关节变量不可能全部在360°范围内运动,所以部分解不能实现,为了满足工作需求,根据一些约束条件选取其中最满意的一组。
2 仿真实验分析
为了验证上述分析的准确性,首先对模型进行仿真实验分析,结果如图4和图5所示,然后采用ADAMS软件处理得到位移曲线如图6所示。
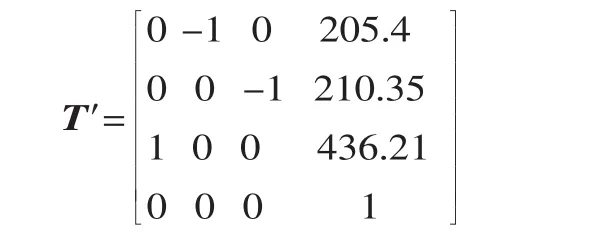
通过上述分析可以看出,机械手末端在0 s时刻的坐标为(102,134,-205.4),与T式的计算结果相近。机械手的末端在3 s时的坐标为(205,210,436),与T’式的计算结果相近,证明了所建模型的准确性。
3 结论
通过仿真实验分析,证明了本文对PUMA560机械手的研究分析的准确性,以及所建模型的有效性,为进一步研究机械手动力学问题奠定了基础。

▲图4 仿真前各连杆之间位置关系

▲图5 仿真后各连杆之间位置关系

▲图6 末端位移曲线
[1] 王玉,王旗华.焊接机器人虚拟样机轨迹模拟和运动仿真分析[J].焊接学报,2012,33(4).
[2] 干敏耀,马骏骑.基于MATLAB的PUMA机器人运动学仿真[J].昆明理工大学学报,2003,28(6).
[3] 臧庆凯,李春贵,闫向磊.基于MATLAB的PUMA560机器人运动仿真研究[J].广西科学院学报,2010,26(4):397-400.
[4] 张铁,谢存禧.机器人学[M].广州:华南理工大学出版社,2004.
[5] 蔡自兴.机器人学[M].北京:清华大学出版社,2000.
[6] 蒋新松.机器人学导论[M ].沈阳:辽宁科学技术出版社,1994.
[7] 马香峰.机器人结构学[M].北京:机械工业出版社,1991.
[8] 李增刚.ADAMS入门详解与实例[M].北京:国防工业出版社,2008.
[9] 陈德民,槐创锋.精通ADAMS2005/2007虚拟样机技术[M].北京:化学工业出版社,2010.
