一种有效的脉冲噪声去除算法
2014-04-03胡积宝
胡积宝,朱 柱
HU Jibao,ZHU Zhu
安庆师范学院 物理与电气工程学院,安徽 安庆 246011
School of Physics and Electronic Engineering,Anqing Normal University,Anqing,Anhui 246011,China
图像去噪是图像处理领域内最基本问题,其目标是将被噪声干扰的图像恢复成原始图像或者最大程度的逼近原始图像,为图像的进一步处理和分析提供良好的数据来源[1]。滤除图像中脉冲噪声并有效地保护好图像的细节一直以来都是设计滤波算法的核心理念。为了实现这个目标,国内外研究者们针脉冲噪声提出了线性滤波算法和非线性滤波算法[2-6]。由于脉冲噪声本身的非线性特征,导致很多线性滤波算法很难有效地处理这种噪声。标准中值滤波滤波算法作为一种统计排序的非线性滤波算法由于其良好的滤波效果、快速的运算速度一度非常流行[7]。但是由于这种方法对图像中很多原始信息遭到破环,容易造成图像细节模糊。
为了解决这种弊端,在标准中值滤波算法的基础上提出了相应的改进算法。其中,对图像中的不同像素使用不同的加权因子就是早期一种常见改进思路,如加权中值滤波算法[8-9],中心像素加权中值滤波算法[10-12],递归中值滤波算法[13-14],以及自适应窗口中值滤波算法[15]。这些算法与标准中值滤波算法相比,其滤波效果有了一定的改善,但没有彻底摆脱标准中值滤波同时处理噪声像素和非噪声像素的弊端[16]。针对上述问题,研究者们采取为算法设置开关处理思路。应用开关中值滤波算法的关键是如何设计开关将噪声像素和非噪声像素准确地分类[17]。文献[18-19]利用图像的局部统计信息以及图像的局部细节设计噪声点检测算法,从而实现了对图像细节的保护。模糊技术和开关结合进一步拓展了开关的固有概念[20-21],这一类方法应用模糊的思想对图像中的噪声像素和非噪声像素根据其模糊隶属度进行分类,提高了分类的准确程度。自适应软开关中值滤波算法应用模糊集的概念将图像中的像素分为原始像素、孤立的噪声像素和非孤立模糊的噪声像素[22-23]。对于这三类检测结果通过原像素值、中值和模糊取值的方式对三种类型的检测结果赋值。
上述的这些算法大多仅仅利用均值、中值以及它们的一些变形来对噪声像素赋值,其赋值精度往往达不到理想的精确度,其结果将导致这些算法的处理结果对边缘和细节的保护力度不够。为了解决中值滤波模糊细节的弊端,国内外研究者提出通过泛函模型建立正则化方程,然后求解方程的极小值来修复随机值噪声图像的方法。但这种方法会改变部分非噪声像素的信息,造成图像细节模糊。针对这一问题,Chan等人将保边正则化函数模型引入了开关阈值,提出了两步滤波算法[24]。算法第一步是噪声点检测,第二步利用保边正则化模型和检测结果建立目标函数,通过处理目标函数解析出噪声点处最合理的像素值,从而实现对噪声点的准确赋值。
这一类方法具有很高的赋值精度,但前提是必须精确地检测出噪声像素,检测结果越精确,滤波效果越好。为此,本文利用SLOM统计量结合S-估计统计量采取由粗到精的检测方式检测图像中的脉冲噪声,再利用正则化目标函数对噪声像素修复,从而提高了噪声像素的检测精度,为后续的图像修复提供了优质的数据源,有效地保护了图像的细节信息。
1 SLOM
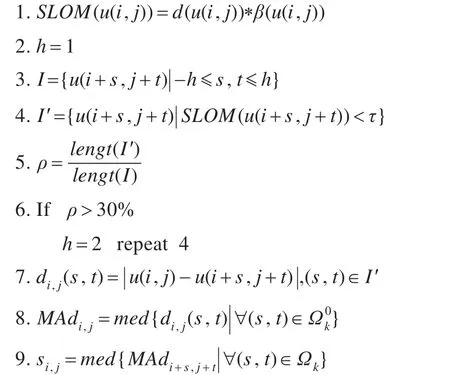
对于每一个点o,定义一个测度d(o)来衡量该点与周围点的关系:

式(1)中dist(o,p)表示点O与领域点 p之间的欧式距离,N(o)表示o点的邻域点集,然后定义d~(o)如下式:

局部空间异常测度定义为:

对于点o来说,其SLOM值越大,那么它属于局部异常点的可能性就越大。
波动因子β(o)来获取区域的波动情况,其值可以根据集合N+(o)内各个点的d~值与[ ]avg(N+(o))的取值情况进行计算,整个过程的伪代码如下:
算法1波动因子计算伪代码

在一幅受噪声干扰的图像u中,由于图像中部分像素点已经被噪声干扰,若用滤波窗口中的所有像素计算心像素u(i,j)的SLOM值,如果u(i,j)为非噪声点,当邻域像素存在噪声点时会使得u(i,j)的SLOM变大,从而影响计算结果的精确性。为此,选择滤波窗口中与中心像素灰度值邻近的 N个像素点计算u(i,j)的SLOM值。认为这N个像素是非噪声像素,这样,当u(i,j)是非噪声像素时,由于计算过程中得到的d值较小,所以SLOM值自然会比较小,当u(i,j)是噪声像素时,计算过程中得到的d值会比较大,所以最终的SLOM值会比较大。窗口大小可以根据噪声点的密度来选择。一般情况下,当图像中噪声点的密度小于30%时,用3×3的窗口计算像素u(i,j)的SLOM值,当图像中的噪声点的密度大于30%时,用5×5的窗口算像素 u(i,j)的SLOM值。对于N的取值,通过大量实验发现,当窗口为3×3时,取 N=5,当窗口为5×5时取 N=10。
脉冲噪声干扰下图像的SLOM计算结果如图1所示。图中Lena图像受到密度为10%的脉冲噪声干扰(既有随机值脉冲噪声又包含固定值脉冲噪声),由于整个图像的数据量比较庞大,此处,仅仅列出7×7的图像块作为示例,为了说明SLOM对边缘和细节具有较强的鲁棒性,取图中7×7的图像块位于图像的边缘过渡区域。在图像块中一共有8个噪声点,其灰度值和对应的SLOM值为图1中有下划线的数字。结果显示绝大多数非噪声点,即使这些点位于图像的边缘位置,其SLOM值一般情况下小于1,而对于噪声像素,它们的SLOM值往往都大于1,甚至更大。由此可以看出,SLOM的确可以用来粗略地衡量图像中的噪声像素。

图1 10%脉冲噪声干扰下Lena图像局部块上各个像素的SLOM值
2 S-估计
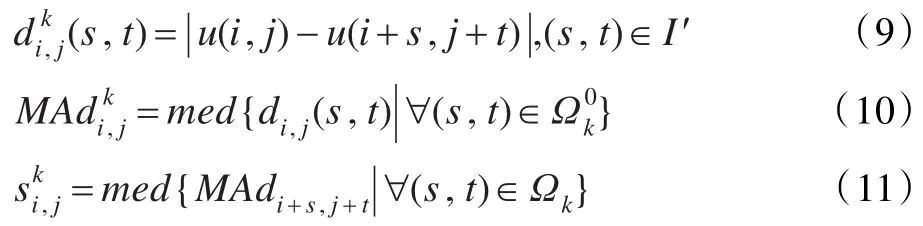
MAD(Median of Absolute Difference)统计量是一种稳健的数据变化估计。利用MAD数据可以计算出数据的变化趋势,并且在这个变化趋势基础上可以分析出数据在相应位置上的变化幅度。这个统计量的优点在于它对脉冲噪声有比较强的鲁棒性,利用这个特性,人们经常将它用于图像中脉冲噪声的抑制,例如ACWM算法和PWMAD算法[25-26]。然而,这种统计量的最大弊端在于它对分布对称的数据具有较好的效果,对于分布不对称的数据效果不是很理想。在一幅图像中,图像的边缘和细节所在的区域往往存在着大量的不对称数据,所以需要找到一种可以同时描述对称数据和非对称数据的变化估计。S-估计就是在克服了MAD统计量的这种弊端的基础上提出的数据波动估计。其定义如下:

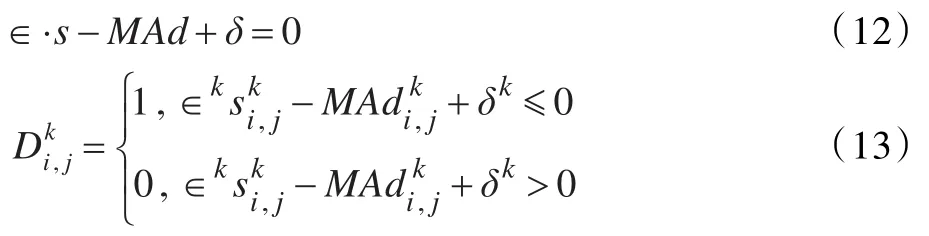
对于一组样本数据t,其数据波动的S-估计定义为:式中样本数据ti,i=1,2,…,N,包含N个元素。首先对于每一个下标i,计算出数据列的中值,然后将每一个下标下得出的中值重新组成新的数据列,紧接着计算新数据列的中值便得到了样本数据的S-估计。如果把图像中以u(i,j)为中心的滤波窗口中的像素作为样本数据,可以利用S-估计计算出窗口中像素点灰度值的总体变化趋势以及u(i,j)处的灰度变化幅度,也即图像中像素点u(i,j)处的梯度幅度。由于这种数据对脉冲噪声具有较强的鲁棒性,所以利用S-估计采取类似文献中所述的方法,可以减少图像去噪过程中图像边缘和细节对噪声点检测所带来的干扰[20]。具体方法将在下文中具体描述。从S-估计的定义可以很容易得出S-估计存在弊端,也即其计算量比较大。例如一个包含N个数据的样本,必须计算中值N+1次。如果在图像中对每一个像素都利用这种方式计算其S-估计,那么计算量将更加庞大。在文献[20]中,V.Crnojevi´c等就MAD计算量大的问题,提出了Pixel-Wise MAD(PWMAD)。本文也利用这种基于像素点的方法计算每个像素点的S-估计。令ΩK为图像中的一个滤波窗口,窗口中心像素为 u(i,j),窗口的大小为(2h+1)×(2h+1),k=2h+1,所以坐标集可以定义为:
ΩK={(s,t)|h≤(s,t)≤h∧k=2h+1} (5)然后计算窗口中心像素u(i,j)和其邻域像素u(i+s,j+t)的灰度偏差:


利用 MAdi,j定义像素点 u(i,j)的 S-估计为:

与文献[21]所述的方法相比,本文的方法计算S-估计只需要计算两次中值,而文献[21]中的方法需要计算k2+1次中值,所以本文算法的计算量减少了很多。图2给出了受到30%随机值脉冲噪声和50%固定值脉冲噪声干扰的Lena图像的两种S-估计下的结果,图中上一行是受30%噪声干扰图像的处理结果,下一行是受50%噪声干扰图像的处理结果,从图中可以看出两种方法都具有比较理想的效果,没有明显差别。

图2 两种S-估计的处理结果
算法2图像的S-估计伪代码
理想状况下,即图像中没有任何噪声干扰时,图像的S-估计可以准确地计算出图像边缘和细节信息。然而随着图像中噪声密度的增大,尤其是局部图像的噪声密度过大时,会使得S-估计的结果中出现少许的伪边缘和伪细节。因此,如果可以剔除各个滤波窗口中潜在的噪声像素,降低局部噪声密度,那么S-估计、反映的细节信息将更加准确。为此,本文将结合SLOM,优化了S-估计的计算方法。具体步骤是:
步骤1以噪声图像u为待处理图像。
步骤2计算各个像素点的SLOM值。
步骤3如果像素点ui,j的SLOM值大于某个提前规定的阈值τ,那么将ui,j视为噪声像素,否则为非噪声像素,利用窗口中噪声点和非噪声点个数计算局部噪声密度。
步骤4根据局部噪声密度自适应选择窗口参数h,如果噪声点密度大于30%,取h=2,即窗口的大小为5×5,否则,取h=1,即窗口的大小为3×3。
步骤5根据自适应窗口尺度计算各个像素点的S-估计和Q-估计。
3 SLOM-S-WEPR算法
前面几章分别介绍了图像的局部空间异常测度(SLOM)、图像的S-估计(S-estimate)和正则化滤波算法(WEPR),本章利用SLOM和S-估计检测噪声像素,利用加权正则化滤波算法修复检测出的噪声像素即SLOM-S-WEPR算法。
SLOM-S-WEPR算法的噪声像素检测由粗检测和精检测两个部分组成。在粗检测阶段,利用输入图像u的SLOM数据检测出图像中的明显噪声像素。并根据检测结果计算出局部像素块的噪声粗略密度。利用局部像素块的粗略密度自适应地选择去噪窗口的尺寸。在精检测阶段,利用S-估计和自适应去噪窗口检测粗检测无法检测的噪声像素,整个去噪过程如下:
(1)噪声像素的检测
依据上述分析分别进行噪声像素的粗检测和精检测。
①噪声像素的粗检测
步骤1初始化观测图像数据,令k=0,uk=u。这里k表示迭代次数。
步骤2在(2h1+1)×(2h1+1)的窗口中计算观测图像uk的每个像素的的 SLOM值,。如果图像的噪声密度大于30%,选择5×5的窗口,这时h1=2,否则,选择3×3的窗口,这时h1=1。
②噪声像素的精检测
根据粗检测结果,在3×3的窗口中计算像素块的局部噪声密度ρ,令τ=Ts1,如果ρ<30%,直接执行步骤6,ρ即为算法2中的ρ;
根据粗检测结果,在5×5的窗口中计算像素块的局部噪声密度ρ。
步骤7对噪声像素检测:
步骤8对所有检测出的噪声像素赋值,如果k<kmax,k=k+1返回步骤2,否则停止迭代。
(2)噪声像素赋值
本章利用加权正则化滤波算法(WEPR)通过建立目标函数,然后对目标函数求极值实现噪声图像的修复。
首先,根据每一步的检测结果建立目标凸函数。

这里,A≡{1,2,…,M}×{1,2,…,N}表示一幅大小为M×N的图像,u表示滤波修复图像,(i,j)表示像素点的位置,vi,j表示与(i,j)位置最邻近的四个像素点的集合。在vi,j中如果像素点为非噪声像素取。
根据相关文献,可以选择如下保边正则化势能函数:

本章选择α=1.3,为了提高算法的运算速度,采用GBB算法求上式的极值实现对检测出的噪声像素赋值。
4 实验结果与讨论
下面将对本章的算法做出评价,并将结果与几种同类算法做出比较。利用一组512×512的经典测试图片并将它们添加不同密度的脉冲噪声进行处理。以基于对比度增强的滤波CEF算法[27]、自适应阈值加权中值滤波ASWM算法[25]、ROLD-EPR算法以及ROAD-BEPR算法为随机值脉冲噪声的对比算法。这些算法的滤波窗口和对应参数都以各自文献中最优效果的为准。SLOMS-WEPR是本章算法。
4.1 噪声像素的检测率
噪声像素的检测率是衡量去噪算法性能的一个重要的指标。本节将从噪声像素漏检数(MD)和非噪声像素误检数(FD)两个方面来量化这个指标。表1是Lena图像在各种噪声密度下各种算法的噪声像素漏检数据和非噪声像素的误检数据。对于一个好的去噪算法来说,既要保证尽可能多地检测出图像中的噪声像素,又要尽可能少地误检图像中的非噪声像素。表1数据显示,本文算法可以比较好地平衡MD和FD数据。相比于其他几种算法,本章算法能够在满足低漏检率的基础上,做到尽可能少地误检非噪声像素。
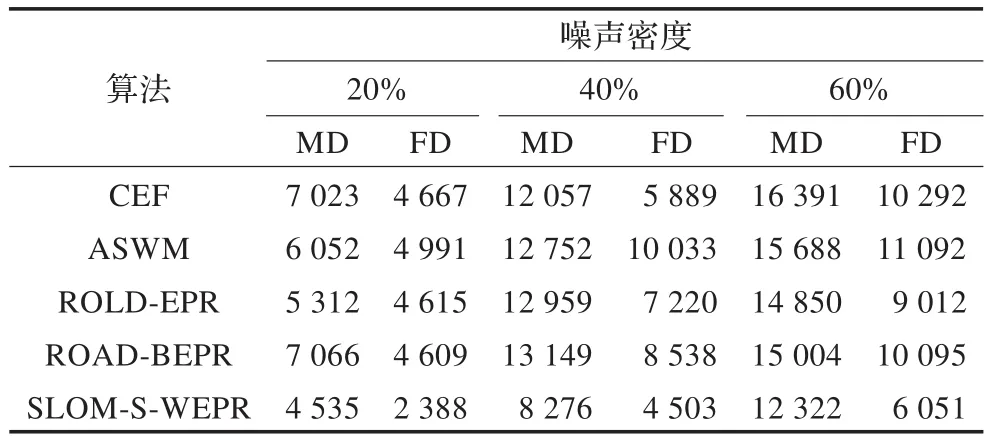
表1 几种算法的噪声像素检测率(随机值脉冲噪声)

图3 60%随机值脉冲噪声干扰下的“Lena”图片的处理效果
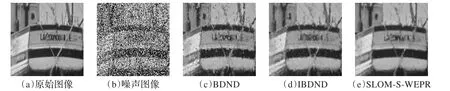
图4 70%固定值脉冲噪声干扰下的“Boat”图片的处理效果
4.2 噪声图像修复质量评价
通过比较峰值信噪比(PSNR)的数值,平均绝对误差(MAE)值以及整体结构相似性索引(MSSIM)来定量描述各个算法的去噪效果。具体实验数据如表2和表3所示。实验结果表明,相比于其他方法本文算法具有较大的PSNR值、MSSIM值以及较小的MAE值,由此说明本文算法优于其他算法。
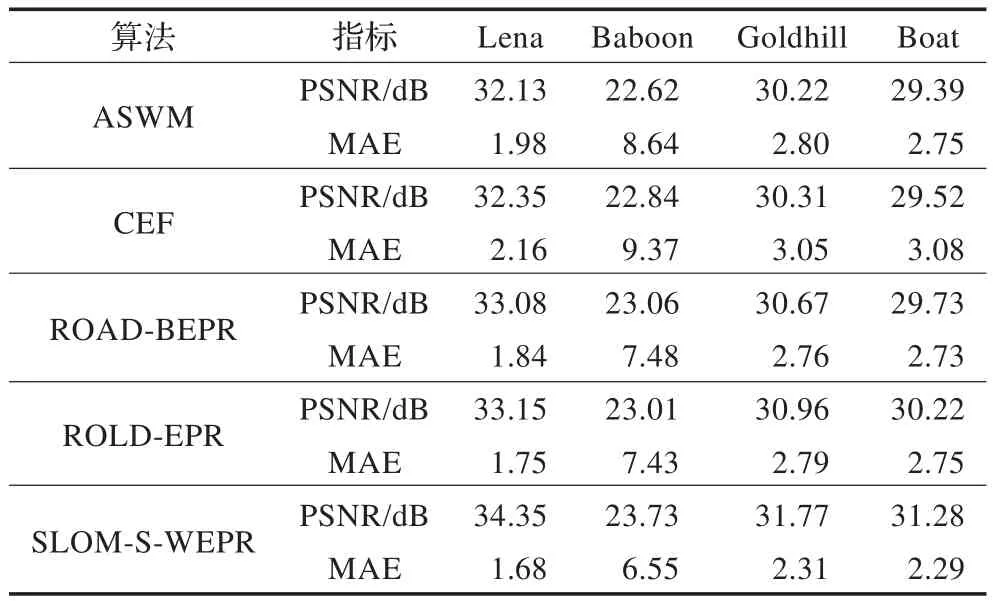
表2 测试图像在30%随机值脉冲噪声干扰下各种算法的PSNR和MAE值
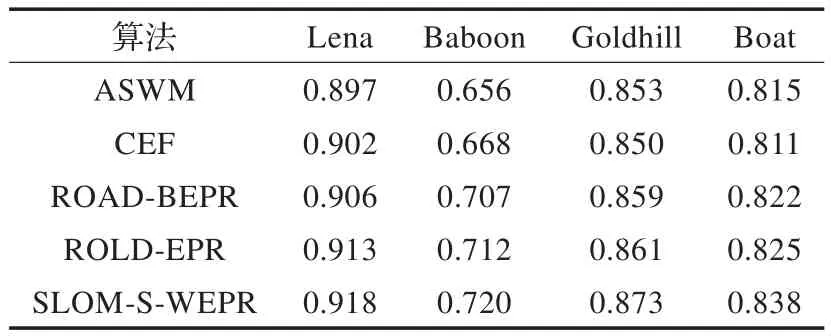
表3 30%随机值脉冲噪声干的测试图像扰在不同算法下对应修复图像的MSSIM值
4.3 去噪效果的视觉评价
为了更加直观地比较本文算法和其他算法的去噪效果,本节通过定性的视觉效果比较各种方法。用被60%随机值脉冲噪声干扰的Lena图片和70%固定值脉冲噪声干扰的Boat图片作为测试图像。以AM-EPR算法、BDND算法和IBDND算法为固定值脉冲噪声的对比算法。以CEF算法、ROLD-EPR算法和ROAD-BEPR算法为随机值脉冲噪声的对比算法。实验结果如图3和4所示。从图中可以很直观地看出本文算法优于其他方法。
5 小结
本文对图像中脉冲噪声的去除进行了研究,通过分析当前脉冲噪声去除算法的缺陷,提出了基于空间异常测度的脉冲噪声的去除方法。算法利用图像的空间局部异常测度结合S-估计由粗到精地检测图像中的噪声像素,有效地提高了噪声像素的检测率,一旦确定噪声像素,采用加权正则化方法对这些噪声像素估值。通过在标准测试图像上的实验数据分析,验证了本文算法有效性和先进性。
[1]Gonzalez R C,Woods R E.Digital image processing[M].NJ:Prentice Hall,2002.
[2]Jin C,Yan M,Jin S.An approach to remove impulse noise from a corrupted image[J].Journal of Optics,2013,15(2).
[3]Kundu A.Application of two-dimensional generalized mean filtering for removal of impulse noises[J].IEEE Transactions on Acoustics,Speech and Signal Processing,1984,32(3):600-609.
[4]Nelson H C Y,Andrew H S L.Performance evaluation of a feature-preserving filtering algorithm for removing additive random noise in digital images[J].Optical Engineering,1995,35(7):1871-1885.
[5]Lee C S,Kuo Y H,Yu P T.Weighted fuzzy mean filters for image processing[J].Fuzzy Sets and Systems,1997,89(2):157-180.
[6]Lin T C.Progressive decision-based mean type filter for image noise suppression[J].Computer Standards and Inter-faces,2008,30(3):106-114.
[7]Yu H,Zhao L,Wang H.An efficient procedure for removing random-valued impulse noise in images[J].IEEE Signal Processing Letters,2008,15(1):922-925.
[8]Qiu G.An improved recursive median filtering scheme for image processing[J].IEEE Transactions on Image Processing,1996,5(4):646-648.
[9]McLoughlin M P,Arce G R.Deterministic properties of the recursive separable median filter[J].IEEE Transactions on Acoustics,Speech and Signal Processing,1987,35(1):98-106.
[10]Toh K K V,Isa N A M.Cluster-based adaptive fuzzy switching median filter for universal impulse noise reduction[J].IEEE Transactions on Consumer Electronics,2010,56(4):2560-2568.
[11]Akkoul S,Lédée R,Leconge R,et al.A new adaptive switching median filter[J].IEEE Signal Processing Letters,2010,17(6):587-590.
[12]Lin H M,Willson A N.Median filters with adaptive length[J].IEEE Transactions on Circuits and Systems,1988,35(6):675-690.
[13]Bovik A C,Huang T S,Munson D C.Edge-sensitive image restoration using order-constrained least squares methods[J].IEEE Transactions on Acoustics,Speech and Signal Processing,1985,33(10):1253-1263.
[14]Chen T,Ma K K,Chen L H.Tri-state median filter for image denoising[J].IEEE Transactions on Image Processing,1999,8(2):1834-1838.
[15]Chen T,Wu H R.Impulse noise removal by multi-state median filtering[C]//IEEE International Conference on Acoustics,Speech,and Signal Processing,2000:2183-2186.
[16]Zhang S,Karim M A.A new impulse detector for switching median filters[J].IEEE Signal Processing Letters,2002,9(11):360-363.
[17]Zhang D,Wang Z.Impulse noise detection and removal using fuzzy techniques[J].Electronics Letters,1997,33(5):378-379.
[18]Schulte S,Nachtegael M,Kerre E E.A fuzzy impulse noise detection and reduction method[J].IEEE Transactions on Image Processing,2006,15(5):1153-1162.
[19]Eng H L,Ma K K.Noise adaptive soft-switching median filter[J].IEEE Transactions on Image Processing,2001,10(2):242-251.
[20]Lin T N,Cahn K J.Adaptive-hierarchical filtering approach for noise removal[J].Displays,2008,29(3):209-213.
[21]Chan R H,Ho C W,Nikolova M.Salt-and-pepper noise removal by median-type noise detectors and detail-preserving regularization[J].IEEE Transactions on Image Processing,2005,14(10):1479-1485.
[22]Cai J F,Chan R H.Minimization of a detail-preserving regularization functional for impulse noise removal[J].Journal of Mathematical Imaging and Vision,2007,29(1):79-91.
[23]Dong Y,Xu S.An efficient salt-and-pepper noise removal[J].Acta Scientiarum Naturalium Universitatis Pekinensis,2006,42(5):604-612.
[24]Dong Y,Chan R H,Xu S.A detection statistic for random valued impulse noise[J].IEEE Transactions on Image Processing,2007,16(4):1112-1120.
[25]Jin L,Xiong C,Li D.Selective adaptive weighted median filter[J].Optical Engineering,2008,47(3).
[26]Awad A S.Standard deviation for obtaining the optimal direction in removal of impulse noise[J].IEEE Signal Processing Letters,2011,18(7):407-410.
[27]Bovik A.Handbook of image and video processing[M].New York:Academic,2000.