反应式腹部触诊模拟装置气动系统的研究
2014-03-09杨涛李笑关婷黄惠敬卢诚君
杨涛,李笑,关婷,黄惠敬,卢诚君
(1.广东工业大学机电工程学院,广东广州 510006;2.广州军区广州总医院,广东广州 510010)
反应式腹部触诊模拟装置气动系统的研究
杨涛1,李笑1,关婷2,黄惠敬1,卢诚君1
(1.广东工业大学机电工程学院,广东广州 510006;2.广州军区广州总医院,广东广州 510010)
根据诊断学中腹部触诊教学的要求,设计了一种新型的反应式腹部触诊模拟装置气动系统,研制了模拟装置的气动驱动器,设计了系统控制结构及控制算法,实验研究了模拟装置气动系统的控制特性和机械特性。结果表明:该系统能实现对气动驱动器内部压力及其硬度的控制,可模拟受训者进行腹部触诊时的感觉。该研究将为设计新型的具有反应式的临床教学装置提供依据和参考。
气动系统;腹部触诊;模拟装置;气动驱动器
腹部触诊是一种通过按压腹部病变及正常区域,根据病人疼痛反应判断腹部疾病的方法[1],是医科学生必须掌握的重要基本技能,只有通过反复训练才能够熟练掌握。传统的腹部触诊技能训练只能在病人身上进行。由于适合教学的典型患者数量远远不能满足教学需求,即使有典型病人,很多医科学生在病人身上练习腹部触诊,必然会增加病人的痛苦,甚至使病情加重,病人难以接受[2-5]。
目前大多数发达国家和地区的高等院校都已经在系统地规划和建设医学模拟培训场所。在这种形势的影响下,医学教学模拟装置的研究逐渐发展起来。国内外临床应用的模拟装置绝大多数属于静态模拟装置,即不能提示受训者对腹部触诊的触觉和力觉[6-7]。少数类型模拟装置属于动态模拟装置,其内部主要利用以电机为动力的机械结构实现病人的病症反应。该类型的模拟装置在实际使用时虽有力觉反应,但是由于内部机械系统刚度等的影响,腹部触觉极度失真,展现出来的症状反应与真实情况相差较大,难以获得高质量的体验性教学效果[8]。
为解决这一难题,模拟受训练者在触诊过程中对病人腹壁紧张度、压痛和反跳痛的感觉,设计了一种反应式腹部触诊模拟装置气动系统[9],对系统的控制特性和机械特性进行了研究。
1 反应式腹部触诊模拟装置气动系统设计
1.1 气动系统组成原理
如图1所示,反应式腹部触诊模拟装置的气动系统由触觉传感器1、气动驱动器2、压力传感器3、控制器4、比例减压阀5、三联件6以及气源7组成。气动驱动器为采用弹性硅橡胶和帘线通过黏结制成的多层网状结构的囊体。数个触觉传感器分布在气动驱动器上表面,用来检测手指按压位置及作用力大小。外腹壁模拟人体外腹部组织形态及弹性,覆盖在气动驱动器及其上的传感器上。控制器用来采集、处理和显示测量信号,分析、计算和输出控制信号。压力传感器与气动驱动器相连,用来检测气动驱动器内部气体压力。比例减压阀出口接于气动驱动器,用来调节气动驱动器内气体压力。气源通过三联件向比例减压阀提供高于其出口压力的恒压气体。
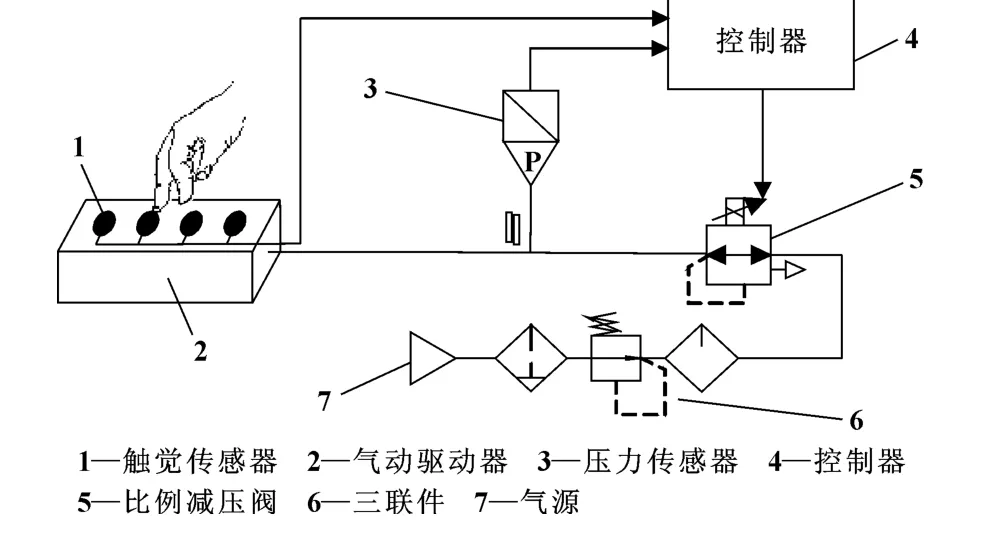
图1 反应式腹部触诊模拟装置气动系统组成原理
当手指按压外腹壁时,触觉和压力传感器分别将手指按压位置、作用力及气体压力信号反馈给控制器,控制器经过控制运算后,输出控制信号给比例减压阀,比例减压阀调节其出口压力,使气动驱动器变硬,模拟病人腹肌收缩的疼痛体征,提供受训者对腹部触诊的感觉。
1.2 气动驱动器设计
气动驱动器是所设计的腹部触诊模拟装置气动系统的核心部件,通过控制气动驱动器内部气体压力改变其软硬,从而模拟病人腹肌收缩的疼痛体征。该驱动器采用弹性硅橡胶和帘线通过黏结制成多层网状结构,如图2所示。
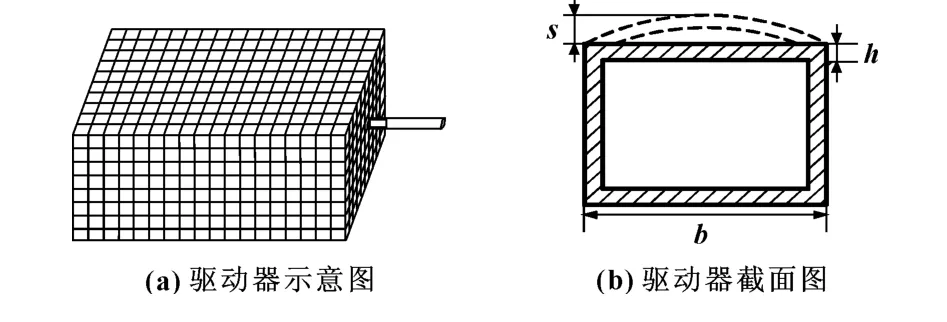
图2 气动驱动器

图3 控制系统结构图
建立气动驱动器的数学模型并加以简化,得到气动驱动器内气体压力p与气动驱动器上表面横向中线的微小位移s的关系为:

式中:E为气动驱动器的弹性模量;h为气动驱动器囊壁的平均厚度;b为气动驱动器的宽度。
根据邵氏硬度的测量原理可知,当气动驱动器弹性模量及尺寸大小等确定后,气动驱动器的软硬变化在数学模型中由s体现出来,s越大驱动器硬度越大[10]。
由式 (1)可知,在给定压力p下,对气动驱动器硬度变化影响最大的因素是材料的弹性模量E。而一旦驱动器制作完成,E就固定不变。所以必须设计制作满足材料弹性模量要求的气动驱动器。
由计算帘线-橡胶复合材料弹性模量大小的偏轴性能的Gough-Tangorra公式[11]可知,制作气动驱动器的复合材料弹性模量计算公式为:
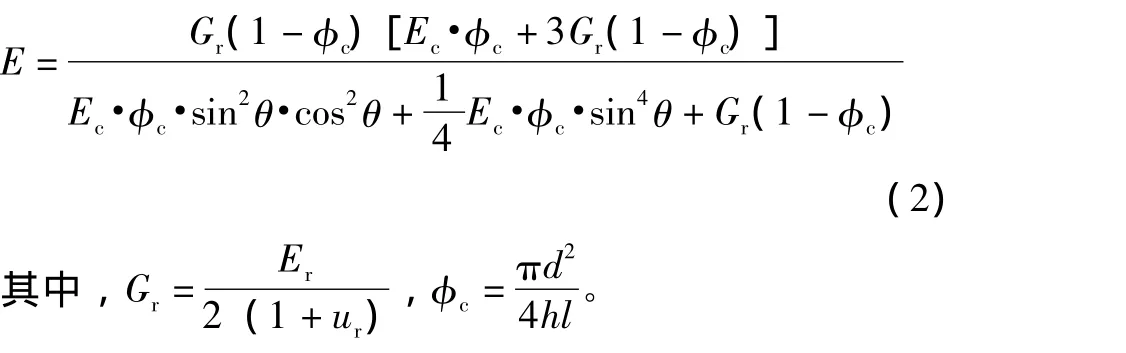
式中:Gr、Er、ur分别为橡胶的剪切弹性模量、弹性模量、泊松比;φc、Ec、θ、d、l分别为帘线的体积分数、弹性模量、帘线角、帘线直径、帘线间距。
根据式 (2),设计帘线角、帘线间距等参数,即可制作出弹性模量满足装置要求的气动驱动器。
1.3 控制器设计
如图3所示,该装置的控制系统采用前馈-PID反馈复合控制。其特点在于前馈控制使系统响应迅速,PID控制能对被控量进行反馈调节[12]。
触觉传感器将检测到的手指压力p转换为电压信号ui,经过医学经验算法的运算得到气动驱动器的给定压力r(t),作为前馈-PID反馈控制器的输入值。g(t)为压力传感器对气动驱动器内气体压力的测量值。前馈控制器的输出量为:

式中:K为前馈系数。
PID反馈控制器的输出量为:

式中:KP为比例系数,TI为积分时间系数,TD为微分时间系数。
则前馈-PID反馈控制器输出的控制量为:

比例减压阀根据控制量u(t)调节其出口压力,并改变气动驱动器的硬度,从而模拟病人腹肌收缩的疼痛体征。
2 实验研究
作者对所设计的反应式腹部触诊模拟装置气动系统的控制特性和机械特性进行了大量实验研究。
图4为在随机给定压力信号下,气动驱动器内部实时压力跟随曲线。通过调节控制器前馈系数K和PID参数,实现了对驱动器内部压力的精确控制。由于不同病情的患者及受训者触诊训练时按压位置和压力不同,受训者体验到的触觉和力觉感受各不相同。精确控制驱动器内部压力,能实现腹肌硬度变化的微小差异的模拟。
图4 实时压力信号跟随实验曲线
图5为将给定随机压力信号延时500 ms后,驱动器对延时给定信号的压力跟随曲线。在实际腹部触诊中,腹部肌肉的硬度变化是在操作者手指按压患者腹部病变区域一段时间后产生的。因此在控制算法中加入延时,可以使症状反应更加逼真。
图5 延时压力信号跟随实验曲线
由于所设计的模拟装置以气动驱动器的压力-硬度特性提示触觉和力觉,因此必须对气动系统中驱动器的机械特性进行研究。以下分别通过实验、ANSYS仿真以及理论计算,研究了气动驱动器内压与硬度变化关系。
图6为驱动器在不同压力p下,上表面横向中线微小位移s的变化曲线。从图中看出,三条曲线的变化趋势一致,且s值比较接近。用气动驱动器内部压力来反映其硬度的变化是可行的。
图6 驱动器内压与硬度关系曲线
为了能准确提示受训者对腹膜炎、阑尾炎、胆囊炎等病症的触觉和力觉,需根据人体对触诊痛觉和腹部肌肉变化的规律,设计合理有效的医学经验算法。
3 结论
根据受训者对腹部触诊技能掌握的要求,设计了一种新型的反应式腹部触诊模拟装置气动系统。该系统融合了气动、传感器和智能控制等技术于一体,使受训者能够真实体验腹部触诊中的触觉和力觉感受,可为设计新型的教学用触诊模型提供参考。
【1】董福慧.触诊诊断学[M].北京:北京科学技术出版社,2005:49-55.
【2】何晓峰,张存泰,刘文励.电子标准化病人教学系统在诊断学教学中的应用[J].中国现代医学杂志,2006,16(1):158-160.
【3】余国龙,杨天伦,张冬梅.检体诊断学教学中心肺听触诊和腹部触诊计算机模拟人实施效果的评价[J].中华医学教育杂志,2008,28(1):78 -79.
【4】邹莉萍,罗和生,董卫国.医学模拟技术在诊断学实验教学与考试中的应用[C]//第十二届全国高等医学院校诊断学教学研讨会,北京,2009:176 -177.
【5】温海青,庞建会,马春虎.浅谈在临床技能集中培训教学中应用电子模型的体会[J].承德医学院学报,2005,22(3):272-273.
【6】NILES Tyler,LIND D Scott,JOHNSEN Kyle.Medicine Meets Virtual Reality 18[M].Holland:ISO Press,2011:408 -414.
【7】HAMZA-LUPFelix G,BOGDA-N Crenguta M,SEITAN Adrian.Medicine Meets Virtual Reality 19 [M].Holland:ISO Press,2012:156-160.
【8】卢贵东.教学用全自动多功能腹部触诊听诊电子模拟人:中国,00252541.0[P].2001 -08 -22.
【9】李笑,杨涛,黄蕙敬,等.一种反应式腹部触诊模拟器:中国,201210304613[P].2012 -12 -19.
【10】邵龙泉,赵铱民,赵信义.SY-1和MDX4-4210硅橡胶拉伸性能、邵氏硬度的测定[J].实用口腔医学杂志,2004,20(2):201-203.
【11】洪宗跃,吴桂忠.子午线轮胎有限元分析第4讲帘线-橡胶复合材料[J].北京橡胶工业研究设计院,2006,26(1):55-61.
【12】侯伯杰,李小清,周云飞,等.直线电机伺服系统的复合前馈 PID 控制[J].机床与液压,2009,37(2):56-58.
Research on Pneumatic System of Reactive Abdom inal Palpation Simulator
YANG Tao1,LIXiao1,GUAN Ting2,HUANG Huijing1,LU Chengjun1
(1.School of Electromechanical Engineering,Guangdong University of Technology,Guangzhou Guangdong 510006,China;2.Guangzhou General Hospital of Guangzhou Military Command,Guangzhou Guangdong 510010,China)
According to the teaching requirements of abdominal palpation in diagnostics,a new type of pneumatic system of reactive abdominal palpation simulator was designed,the pneumatic actuator of the simulator was developed and the system control structure aswell as the control algorithm were designed.The control characteristics and mechanical properties of the pneumatic system of the simulator were investigated in experiments.The results show that this system can implement control the internal pressure and hardness of the pneumatic actuator,and simulate the feeling when trainees do abdominal palpation.This research can provide the basis and reference for designing a new type and reactive clinical teaching device.
Pneumatic system;Abdominal palpation;Simulator;Pneumatic actuator
TH138
A
1001-3881(2014)10-095-3
10.3969/j.issn.1001 -3881.2014.10.029
2013-03-28
广东省科技计划项目 (2006B12901008);广东省大学生创新实验项目 (1184510008)
杨涛 (1987—),男,硕士研究生,主要从事机电液气一体化技术的研究。E-mail:yangtao870908@126.com。