基于FAST 与Simulink 风力发电机组降载荷控制研究
2013-12-14龚睫凯孙文磊吴安
龚睫凯,孙文磊,吴安
(新疆大学机械工程学院,新疆乌鲁木齐830047)
典型的变速风力发电机拥有不同运行区域。如图1 所示,在区域2,控制的目的是,在最优叶尖速比下,使用发电机扭矩控制来增大风能捕捉率。在区域3,发电机扭矩是恒定的,并且用叶片变桨控制来维持风轮转速。另一个风力发电机控制目的是减少结构动态载荷。

图1 风力发电机运行区域
在文献[1 -2] 里,已经阐明用状态- 空间控制器的设计来调节区域3 的风力发电机转速和提高柔性风力发电机模态的阻尼。并说明采用全态反馈控制来确定安装风力发电机的地点以提高瞬态响应和提高稳定性。当风力发电机测量有限时,状态评估必须用在评估安装状态。成功使用状态评估的条件是基于仅仅一小部分的测量值,如发电机转速和塔架前后加速度。其他的研究者在区域2 使用状态-空间的方法设计控制来增加能量提取率和用变桨控制来减少疲劳载荷。
在实地测试风力发电机过程中,用这些现代控制算法来验证其降载荷能力,并把控制算法的执行解决方案运用到商业风力发电机上。降低载荷是减少能量成本的一个重要指标。这些现代控制算法的性能必须与基于经典控制方法的简单控制对比,可以验证载荷减少的趋势。到目前为止,很少研究者发布在实际风力发电机中实施和测试状态-空间控制的结果。并且这些控制的设计是采用增加大阻尼给柔性模态,在开环运行时,其一般有小额阻尼。较差的控制器的设计会使这些模态不稳定,并增加疲劳载荷。设计在区域2 和3 之间的控制器来稳定这些模态是很重要的。在区域2 和3 控制器的平稳过渡必须维持这些低阻尼模态的稳定,这样疲劳载荷也不会增加。
1 3 自由度动力学方程的建立
状态矢量Δx1、Δx2和Δx3分别代表传动链扰动扭转角、发电机扰动转速和传动链扰动角速度。且q6为叶轮方位角;为叶轮转速;q7为发电机方位角;为发电机转速;Kd为传动链扭转刚度系数;Cd为传动链阻尼比。
叶轮旋转自由度平衡扭矩方程为:

式中:Taero为叶轮气动扭矩;Tshaft为主轴反馈扭矩;Irot为叶轮转动惯量。
低速轴反馈扭矩方程为:

Taero泰勒展开再变形有:

主轴扰动扭矩方程为:

叶轮平衡扭矩方程转化成:

平衡条件满足:Taero(w0,Ω0,β0) =Tshaft0
这样可得:

应用状态-空间方程来描述:

那么得出:

同理,发电机的扭矩平衡方程可以写成:

平衡状态下,发电机的加速度为0,得出:

该控制为扭矩控制,那么整机三自由度动力学方程为:

2 基于Simulink 现代控制模型的搭建
在仿真开始前,必须对风力发电机组进行线性化处理,这样才能启动图2 Simulink 仿真控制模型,如图2 所示即在Simulink 中搭建的三自由度控制模型,其中FAST 风力发电机模块式FAST 动力学软件与MATLAB/Simulink 连接接口,通过这个模块搭建起整机动力学仿真,图3、图4 和图5 分别是图2 中的扭矩控制图、状态评估控制器和含有塔架阻尼反馈的PI 控制器。
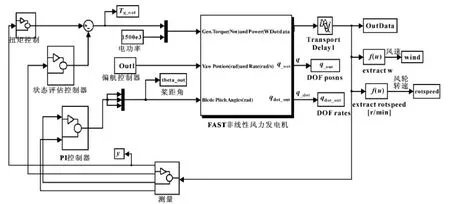
图2 Simulink 仿真控制模型

图3 扭矩控制图

图4 状态评估控制器

图5 含有塔架阻尼反馈的PI 控制器
3 仿真结果分析
图6 是仿真中的风速波动图,可以看到风速在5 ~20 m/s 之间跳动,其风种子是在结构动力学仿真软件FAST 中的Turbsim 模块中生成的。图7、图8 和图9 分别是基于PI 控制和现代控制得到的三叶片叶根处挥舞和摆振方向的载荷对比图,可以看出现代控制应用在风力发电机组的优越性,现代控制算法降载荷的能力也是可观测到的。图10 是低速轴在两种控制器下的载荷结果对比,也很明显得出现代控制方法降低载荷的能力远远优于PI 控制算法。

图6 风速变化

图7 叶片1 叶根挥舞方向和摆振方向载荷比较

图8 叶片2 叶根挥舞和摆振方向载荷比较

图9 叶片3 叶根挥舞和摆振方向载荷比较

图10 低速轴扭矩载荷比较
4 结论
FAST 风力发电机组动力学软件是基于假想模态的方法进行分析的,且其柔性部件为叶片、塔架和低速轴,文中根据IEC 规范,生成了某工况模拟下的风文件,结合FAST 和气动载荷模块的AeroDyn,建立了风文件数据和气弹耦合结构动力学模型。建立了三状态量控制方程,较好反映了整机关键柔性零部件的运行情况。通过测量风力发电机的转速来控制传动链的扭矩和阻尼系数。PI 控制由于只能实现单输入单输出的过程,局限性窄,所以在PI 控制的基础上搭建的现代控制算法,降低了风力发电机组的整体载荷,设计的状态评估反馈法调整扭矩,减少了传动链的载荷。通过PI 控制和现代控制两种控制器的对比,相对于PI 控制算法而言,现代控制算法确实是一条有利于风力发电机组降载荷的路径。
【1】WRIGHT A D,BALAS M J. Design of State-Space-Based Control Algorithms for Wind Turbine Speed Regulation[C]//21st ASME Wind Energy Conference,Reno,Nevada,14 -17January,2002.
【2】WRIGHT A D,BALAS M J.Design of Controls to Attenuate Loads in the Controls Advanced Research Turbine[C].23rd ASME Wind Energy Conference,Reno,Nevada,5 -8January,2004.
【3】邓英,梁晶晶,王湘明,等.减缓风力发电机组驱动链载荷的控制器[J]. 太阳能学报,2009,30(10):1420 -1423.
【4】WRIGHT A D. Modern Control Design for Flexible Wind Turbines[R]. NREL Report No. TP-500-35816,National Renewable Energy Laboratory,2004.
【5】范晓旭,白焰,吕跃刚,等.大型风发电机组线性二次型高斯最优控制策略[J]. 中国电机工程学报,2010,20(30):100 -105.
【6】吴士昌,吴忠强.自适应控制[M].北京:机械工业出版社,2005:62 -176.
【7】吴安.风力发电机组整机动力学模型和载荷控制研究[D].乌鲁木齐:新疆大学,2012.
【8】包能胜,叶枝全.水平轴风力机状态空间模型参数辨识[J].太阳能学报,2009,24(3):371 -375.
