基于空气弹簧充放气特性的汽车运行姿态控制
2013-08-22夏晶晶
夏晶晶
(1.东南大学机械工程学院,江苏 南京 211189;2.淮阴工学院交通工程学院,江苏 淮安 223001)
当汽车遇到极限工况时,如小半径转弯,躲避障碍物等工况,由于汽车发生过量的动态载荷横向转移,容易诱发侧翻事故;而且有部分汽车由于工作装置的需要对于车身水平有较高要求,因此有必要在汽车上安装车身姿态控制系统,保持车身水平满足工作装置需要,并且在汽车侧倾状况下保证汽车的侧向稳定性.
目前,国内外对于汽车侧翻控制系统进行了大量的研究,A.B.Dunwoody等[1]提出一种主动控制系统,利用液压式第5轮和主动悬架来控制汽车的侧倾运动,使侧翻门槛值提高了20% ~30%;T.J.Wielenga等[2]提出一种防侧翻控制系统,利用差动制动代替全轮制动,若车轮离地或汽车横向加速度超过门槛值,该系统立即触发差动制动措施避免侧翻.上述几种方法确实在一定程度上抑制车身侧倾的趋势,可以减少侧翻事故的发生,但是对于汽车侧倾的抑制效果有限,而且四轮转向、差动制动同时还对其它系统功能造成干涉.另在部分汽车上已经装有可以调节车身高度的空气悬架,但它的主要作用是有些工况下提高车身高度改善汽车通过性,有些工况下降低汽车质心改善汽车行驶稳定性,以及提供侧跪功能便于乘客上下车等,而没有涉及保持车身水平的功能.
笔者结合空气弹簧的充放气特性,为汽车设计车身运动姿态控制系统及其控制策略,在侧倾危险状况下,及时调整空气悬架的刚度,提高汽车的侧向稳定性,减少汽车侧翻事故的发生;在常规工况下控制车身水平,满足工作装置需要.
1 空气弹簧充放气特性
目前部分汽车上装有的空气弹簧充放气的目的主要是控制车身高度,根据车速、路面等工况需求,调节空气弹簧高度位置,改变车身高度,改善汽车低速时的通过性、高速时的行驶稳定性以及实现便于乘客上下车的侧跪功能等.空气弹簧充放气系统由空气压缩机、储气筒、电磁阀以及气源处理元件、保护元件等组成.
空气弹簧的充放气特性研究属于开口系统问题,即容器内与外界进行质量交换、能量交换和力的相互作用过程中,容器内的物理量(如压力、温度等)随时间变化的规律.
当进行车身水平位置调节时,充放气速度较慢,可以近似为在固定载荷下的变容积充放气,为等温过程;当进行汽车空气悬架刚度控制时,充放气速度较快,可以近似为在动载荷下的固定容积充放气,为绝热过程.
对于近似为固定容器的空气弹簧进行充放气,计算充放气时间的公式如下:

式中:ρ1,ρ'1为充气放气前后空气弹簧内气体密度;ρ为进入放出气体的密度;A为充气放气管路截面积;V为空气弹簧的体积;u为管道内气体平均流速;t为充气放气时间.
对于近似为变容积容器的空气弹簧进行充放气,计算充放气时间的公式如下:

式中:ΔV为充气放气时空气弹簧容积的变化量.
根据伯努力方程可以确定管道内气体平均流速,公式为

式中:p1为储气筒额定压力,研究中考虑为恒定压力;p2为空气弹簧内压力.
实际充气过程中,需要考虑随着向空气弹簧充气过程,气囊压力增加,有3个影响因素:① 气囊中气体温度升高;②使车架加速,静载荷变为动载荷;③克服减振器的力.因此在确定实际空气弹簧充气时间,需要取空气弹簧承载系数γ1进行修正.
2 汽车运行姿态控制
汽车运行姿态控制主要是在特殊工况下进行空气悬架刚度控制提高汽车侧向稳定性,以及在常规工况下根据工作装置需要进行车身水平位置控制.
目前,国外汽车侧翻指标的选取主要有侧向加速度,侧倾角以及横向载荷转移率3种.考虑兼顾汽车侧倾刚度控制、汽车水平位置控制,将侧倾角以及侧倾角速度作为汽车运行姿态控制的评价指标.
在普通空气悬架系统的基础上增加前后、左右2个方向的侧倾角传感器、高速开关电磁阀,系统压力稳定为1 MPa,用来测量车身侧倾角、侧倾角速度、空气悬架充放气速度等参数.实现上述控制的汽车运行姿态控制系统,如图1所示.
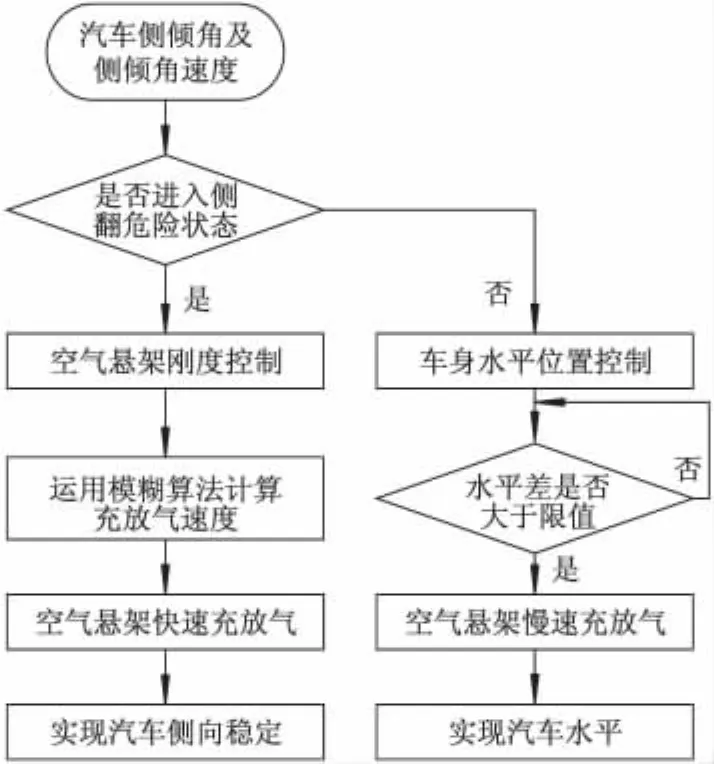
图1 汽车运行姿态控制示意图
汽车运行姿态控制系统首先根据侧倾角传感器测量的车身侧倾角及算出的侧倾角速度信号,判断汽车是否处于侧翻危险状态,侧倾角及侧倾角速度与汽车侧翻危险状态的关系由试验得出,并存储在电子控制单元(ECU)中,如果处于侧翻危险状态需要进行空气悬架刚度控制,运用模糊算法计算出合理的充放气速度进行快速充放气,实现汽车的侧向稳定;如果没有处于侧翻危险状态则根据工作装置需要进行车身水平位置控制,当侧倾角传感器测出水平差大于限值时进行慢速充放气,实现车身水平[3-4].
2.1 空气悬架刚度控制
首先分析空气弹簧不受充放气影响,处于封闭状态时的刚度特性[5].
假定为绝热压缩,气压-体积关系方程为

式中:p0为大气压;γ为比热比;p3为空气弹簧内初始状态的绝对气压;V1为空气弹簧内初始状态的相应的容积.

式中:S2为空气弹簧的有效承载面积;δ为空气弹簧变形量.

式中:K为空气弹簧刚度;F为空气弹簧承受载荷.
由于体积的改变相对初始体积要小得多,则刚度表达式可以简化为

在实际系统中,由于充放气空气弹簧内气体密度、气体压力发生了较大变化.

综合以上公式可以得出,空气弹簧刚度主要取决于空气弹簧内空气压力,而空气压力的变化取决于空气弹簧的充放气特性,充放气特性受到进气压力差、进气阻力等因素影响.因此通过对空气悬架的充放气,改变其内部压力,可以使空气悬架的刚度发生改变.依据以上原理设计空气悬架刚度调节控制器,如图2所示.

图2 空气悬架刚度调节控制器
由于侧倾角以及角速度和充放气速度没有确切的数学关系,因此在空气悬架刚度调节控制中使用模糊控制器.基于以上基本原理,通过足够多的试验,制定合理的模糊规则,以侧倾角以及角速度为输入变量,通过模糊推理,得出高速开关电磁阀PWM驱动信号的占空比大小,控制空气弹簧的充放气速度,侧倾内侧充气,侧倾外侧放气.
建立高速开关电磁阀PWM驱动信号的占空比与侧倾角以及角速度的关系为

式中:D为高速开关电磁阀PWM驱动信号的占空比;φ为车身侧倾角.
侧倾角论域为[0,20],侧倾角速度论域为[0,15],高速开关电磁阀PWM驱动信号的占空比论域为[0,1].在整个论域范围内定义输入输出模糊变量的模糊子集:{PL,PM,PS,Z,NS,NM,NL},分别代表正大、正中、正小、0、负小、负中、负大.根据试验数据制定空气悬架刚度调节模糊控制器控制规则:

通过选定隶属度函数可以把精确的变量模糊化,为了使控制器具有较快的响应和较好的稳定性,选择钟形隶属度函数.采用重心法将模糊输出进行解模糊,得到精确的控制输出.
在汽车行驶中,由于路面倾斜度较大导致载荷过度向一侧转移,或者在高速转弯时,由于离心力的作用,汽车有倾翻趋势时,由安装在车身上的侧倾角传感器测量出的车身侧倾角以及角速度,与ECU中存储的试验数据对比,确定汽车处于侧翻危险状态时,悬架刚度控制开始作用,ECU产生高速开关电磁阀的PWM驱动信号,控制空气弹簧的充放气速度,及时调整空气悬架的刚度,同时形成与倾翻趋势相反的反侧倾力矩,保证汽车的侧倾稳定性[6-8].
2.2 车身水平位置控制
汽车在复杂道路上行驶时,车身不可避免会发生倾斜,车身倾斜会影响车上工作装置的工作,有必要通过车身水平位置控制实现车身的水平.根据式(3),(4),同时考虑在容积变化过程中,空气弹簧的有效承载面积变化远小于空气弹簧的变形量,因此可以得出,当充放气速度较慢,近似为是在固定载荷下的变容积充放气,可以通过调节空气悬架的变形量,实现车身水平位置的调节.依据以上原理设计车身水平位置调节控制器,如图3所示.

图3 车身水平位置调节控制器
通过前后、左右倾角传感器测量车身的倾角情况,与存储在ECU中的允许值(允许值的大小根据具体工作装置需要设定)进行比较,如超过允许值,ECU发出PWM驱动信号,驱动电磁阀,以不变且较慢的速度进行充放气来改变空气弹簧的变形量,始终将车身保持水平.
3 试验验证
考虑车身水平位置控制的主要方法近似常规的车身高度控制,且控制方法相对简单,因此主要进行空气悬架刚度调节控制的试验验证.由于汽车侧翻试验的危险性,选用仿真试验方法进行验证,运用Matlab/Simulink 软件进行仿真[9-10].
选择汽车运行的阶跃转向工况,以80 km·h-1的行驶速度、方向盘转角200°的输入条件来验证所提出的侧翻主动控制的效果.图4为不进行空气悬架刚度控制和进行空气悬架刚度控制的侧倾角变化情况的比较,曲线1为不进行空气悬架刚度控制的侧倾角变化情况,曲线2为进行空气悬架刚度控制的侧倾角变化情况.

图4 车身侧倾角变化情况
从图4可以看出,不进行空气悬架刚度控制,汽车的侧倾角不断增加,有侧翻的危险;进行空气悬架刚度控制,汽车的侧倾角受到很好的控制,基本稳定在4.1°左右.图5为后桥空气悬架的刚度变化情况,曲线3为左侧空气悬架的刚度变化情况,曲线4为右侧空气悬架的刚度变化情况.

图5 空气悬架刚度变化情况
从图5可以看出,当汽车处于侧倾危险状态时,汽车运行姿态控制系统及时进行左侧、右侧空气悬架充放气控制,实现空气悬架刚度的调整,左侧刚度从原来的25500 N·m-1上升至28700 N·m-1,上升了12.5%,右侧刚度从原来的25500 N·m-1下降至22100 N·m-1,下降了13.3%,实现汽车的运行姿态控制.
4 结论
充分运用空气弹簧的充放气特性,从汽车的工作实际出发,设计了汽车运动姿态控制系统.汽车运动姿态控制系统在侧倾危险状况下,可以及时调整空气悬架的刚度,提高汽车的侧向稳定性,减少汽车侧翻事故的发生,而且在常规工况下可以控制车身的水平情况,可以满足工作装置需要.
References)
[1]Dunwoody A B,Froese S.Active roll control of a semitrailer[C]∥SAE Technical Paper Series.USA:SAE Publication Group,Paper Number:933045.
[2]Wielenga T J,Chace M A.A study of rollover prevention using anti-rollover braking[C]∥SAE Technical Paper Series.USA:SAE Publication Group,Paper Number:2000-01-1642.
[3]Wang J,Wilson D A,Xu W,et al.Integrated vehicle ride and steady-state handling control via active suspensions[J].International Journal of Vehicle Design,2006,42(3/4):306-327.
[4]March C,Shim T.Integrated control of suspension and front steering to enhance vehicle handling[J].Journal of Automobile Engineering,2007,221:377-391.
[5]杨启耀.ECAS汽车悬架系统的匹配[D].镇江:江苏大学汽车与交通工程学院,2008.
[6]陈 龙,袁传义,江浩斌,等.汽车主动悬架与电动助力转向系统自适应模糊集成控制[J].汽车工程,2007,29(1):8-12.Chen Long,Yuan Chuanyi,Jiang Haobin,et al.Integrated adaptive fuzzy control of vehicle active suspension and electric power steering system[J].Automotive Engineering,2007,29(1):8-12.(in Chinese)
[7]袁传义,陈 龙,江浩斌,等.主动悬架与电动助力转向系统模糊集成控制[J].江苏大学学报:自然科学版,2007,28(1):29-32.Yuan Chuanyi,Chen Long,Jiang Haobin,et al.Fuzzy integrated control of active suspension and electricalpower steering system[J].Journal of Jiangsu University:Natural Science Edition,2007,28(1):29-32.(in Chinese)
[8]贝绍轶,袁传义,陈 龙,等.基于轴距预瞄的半主动悬架模糊神经网络控制[J].汽车工程,2010,32(12):1068-1070.Bei Shaoyi,Yuan Chuanyi,Chen Long,et al.Fuzzy neural network control of semi-active suspension based on wheel base preview[J].Automotive Engineering,2010,32(12):1068-1070.(in Chinese)
[9]楼少敏,付 振,许沧粟.整车半主动悬架滑模控制器的设计与仿真[J].汽车工程,2010,32(8):719-725.Lou Shaomin,Fu Zhen,Xu Cangsu.Design and simulation of a sliding mode controller for vehicle semi-active suspension[J].Automotive Engineering,2010,32(8):719-725.(in Chinese)
[10]Allotta B,Pugi L,Bartolini F.Design and experimental results of an active suspension system for high-speed pantograph[J].IEEE/ASME Transactions on Mechatronics,2008,13(5):548-557.
