野战环境下大型飞机超低空气动特性分析
2013-07-25陈杰马存宝许和勇
陈杰,马存宝,许和勇
(西北工业大学航空学院,陕西西安 710072)
0 引言
现代战争要求大型飞机具备在各种非正常或野战情况下完成超低空飞行的能力,如要求在较低等级跑道上(甚至野外平坦路面)完成起飞着陆和超低空空投等。对于低空飞行特性的研究主要源于地效翼船的兴起。由于地面效应主要涉及低空粘滞气流对翼型的影响,因此翼型和周围气流间的相互作用是研究的重点,大量学者从流体力学角度,针对飞行器机翼构型和气流特性开展了相关研究[1-5]。
野战环境下地面情况的复杂性给大型飞机超低空飞行带来了诸多不确定性因素,如丘陵地带的不规则小山包、构筑工事遗留的长条沟壑、野战机场残留围墙等。这一系列地面不确定物对大型飞机超低空地面效应或机翼下方流场的影响,会导致飞行模型突变等安全控制问题,如超低空飞行过程中机翼两端沿飞行路径出现不对称山包或其他障碍物,飞行器由于机翼下流场的压缩,左右机翼会出现短时升力差,而低空飞行速度相对较小,方向舵阻尼效率较低,尤其是大展弦比机翼飞机由于侧向阻尼不足可能导致机翼摇晃甚至翼尖触地的危险。总体来讲,在离地高度较低的情况下,飞行员操纵裕度相对较小,给飞行控制带来较大的麻烦,而飞行器常规风洞模型试验中往往不考虑低空飞行,后期控制律试飞中也不考虑3 000 m以下空域,因此,有必要对此飞行过程中的动力学与控制问题开展相关研究。
鉴于低空作战任务要求的日益提高和对低空飞行安全的日趋重视,本文采用Gambit和Fluent流场计算工具,以某大型飞机为例对存在地面障碍物情况下超低空飞行过程中的地面效应问题进行了仿真,模拟并分析了这一动态过程对飞行器各气动参数的影响,并从飞行控制角度对由此带来的闭环控制问题进行了探讨。
1 计算外形
出于研究大型飞机超低空飞行气动特性的目的,选取目前计算流体力学领域进行阻力计算研究用的经典跨声速翼身融合运输机DLR-F6标准构型数据为例。DLR-F6是德国宇航公司(DLR)公布,并以空中客车为背景提出的早期F4飞机模型的改进版,设计巡航速度为Ma=0.75,其详细参数见文献[6]。
本文采用的计算构型数据由Gambit生成。为了便于简化分析大型飞机超低空飞行过程对气动特性的影响,在采用Gambit进行网格建模过程中将发动机短舱和挂架去除,并在其主机翼根部添加整流装置,得到DLR-F6模型如图1所示。

图1 DLR-F6大型飞机简化网格模型Fig.1 Simplified mesh model for large airplane DLR-F6
2 仿真环境构建与网格生成
2.1 飞行状态
为了研究野战等复杂环境下大型飞机超低空飞行气动特性,分析纵横向各参数在低空复杂环境下的变化特点,设定DLR-F6飞机飞行状态如下:飞行速度85 m/s;飞行高度4 m;迎角0°。
2.2 纵向障碍
为了模拟战场工事墙或类似建筑,假定飞行路径上存在与飞机x轴垂直的条状障碍物,其长度无限且呈梯形,障碍模拟如图2所示。
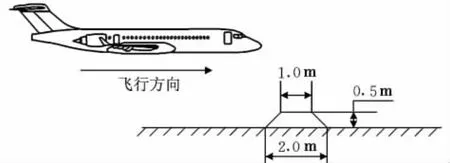
图2 纵向障碍物示意图Fig.2 Longitudinal obstacle
由于飞行器超低空飞行,机身离地面纵向障碍物较近,为了较好地计算障碍物对气动性能的影响,在网格点布置时将障碍网格间距设置与机翼网格间距相近。
2.3 侧向障碍
野战环境尤其是丘陵地带,不可避免地存在各种不规则的地形凸起。大型飞机在此环境下超低空飞行必然受到沿翼展两边障碍物的不平衡“托起”。与纵向障碍类似,假定飞机飞行路线左右两边存在不对称半球形障碍,障碍模拟如图3所示。
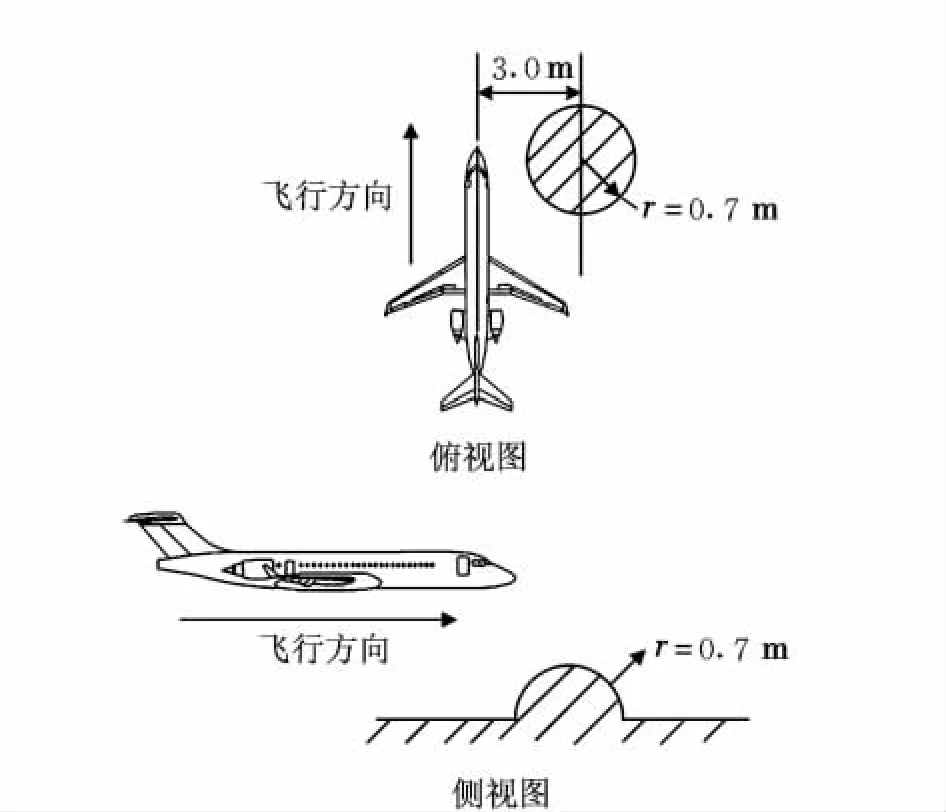
图3 侧向障碍物示意图Fig.3 Lateral obstacle
同样,由于飞行器离地面较近,在网格点布置时将球面网格间距设置与机翼网格接近。
2.4 网格生成
为了详细反映大型飞机超低空飞行过程中地面复杂环境对气动参数的影响,在Gambit网格设置中将飞行器机翼和地面凸起障碍物部分的网格进行了细分,并主要采用三棱柱网格。在纵向障碍物网格建模中,为了简化模型和计算,设定了飞行器对称面,进行半模计算。图4和图5分别为纵向和侧向障碍物与飞行器表面网格示意图。
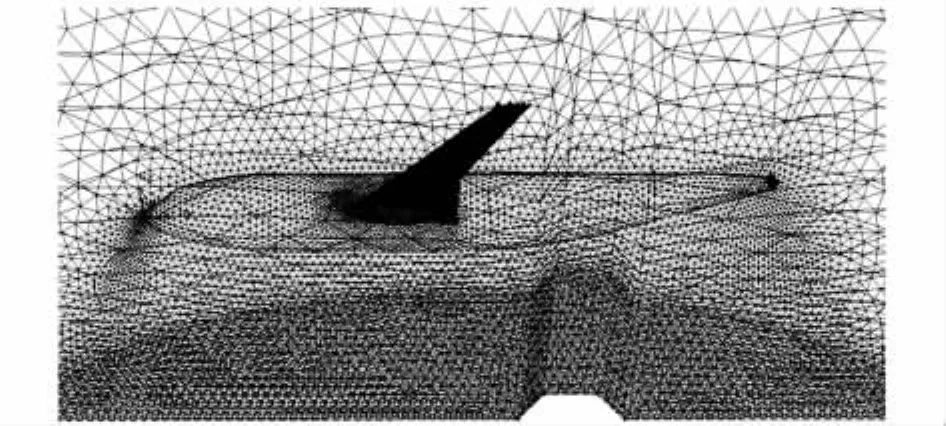
图4 纵向障碍物与飞行器表面网格Fig.4 Surface mesh for longitudinal obstacleand airplane
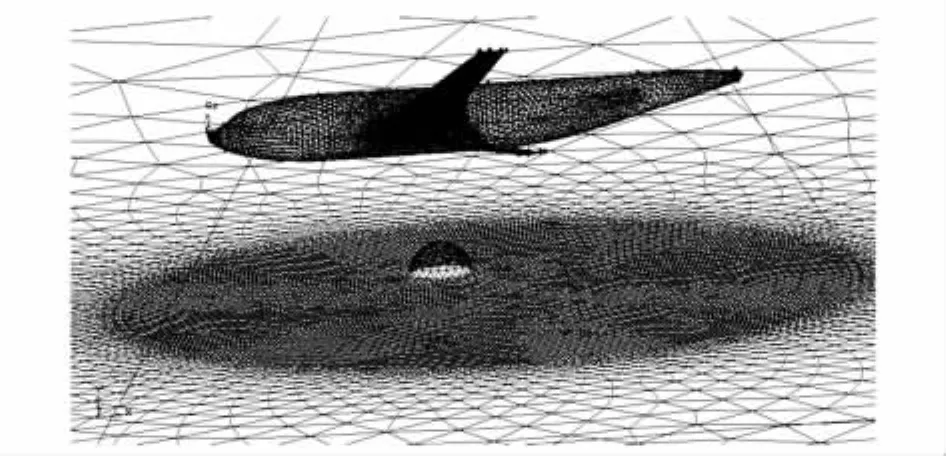
图5 侧向障碍物与飞行器表面网格Fig.5 Surface mesh for lateral obstacle and airplane
3 计算结果与分析
将Gambit中生成且表示各种不同条件下的飞行网格数据导入Fluent进行相应的数值模拟计算,分析复杂地面环境下大型飞机超低空飞行气动特性。本文的计算状态如表1所示。

表1 Fluent计算状态Table 1 Computing parameters of Fluent
3.1 纵向障碍物仿真
为了模拟大型飞机超低空前向飞行过程中遭遇地面纵向障碍物的影响,分别在Gambit中建立如图2所示的障碍物相对飞行器向后移动10个位置的网格模型,并将其导入Fluent中进行迭代计算(n=1 000步以上),气动参数收敛历程如图6所示(由于篇幅所限,仅给出一个位置的阻力系数收敛历程图)。从图6可以看出,迭代计算有较好的收敛解,在n=500步后阻力系数就已基本收敛。

图6 阻力系数收敛历程Fig.6 Convergence response for drag coefficient
针对10个障碍物位置计算得到各个位置点飞行器气动参数的收敛值,得到随大型飞机复杂野战环境下超低空飞行的气动参数变化曲线如图7~图9(第一个点为不存在障碍物的情况)所示。
由图7~图9的升力、俯仰力矩系数和阻力系数曲线可见:随着飞行器向前飞行,障碍物尤其对飞行升力和俯仰力矩系数产生了较大影响,升力由于机翼下方的气流挤压而增加,地效作用对飞机的镜像托举力增大,而飞离障碍物后升力又由于其撤出而减小,从全机来看产生了随时间变化的振荡升力;而俯仰力矩系数则相反,出现前减后增的过程。
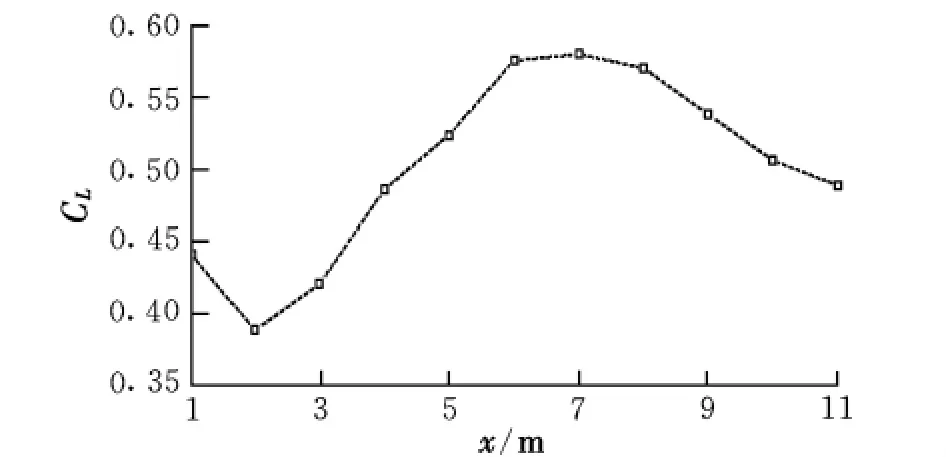
图7 升力系数曲线Fig.7 Curve of lift coefficient
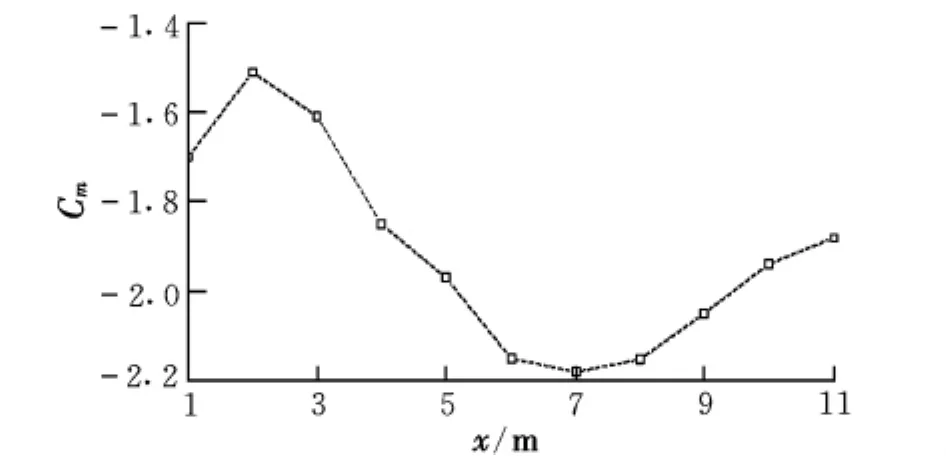
图8 俯仰力矩系数曲线Fig.8 Curve of pitch moment coefficient

图9 阻力系数曲线Fig.9 Curve of drag coefficient
由于飞行器超低空飞行过程中所存在的地面效应问题,随着高度的降低,飞机纵向短周期阻尼会有所降低[7],如果在地面飞行轨迹上出现较大纵向障碍,飞行姿态可能出现短时点头现象,而大型飞机由于机身细长,超低空飞行操纵余度较小,极其容易造成机头或机腹触地的危险。
3.2 侧向障碍物仿真
同样,为了模拟飞机超低空飞行过程中遭遇地面侧向不对称障碍物的影响,分别在Gambit中建立如图3所示障碍物相对飞行器向后移动的网格模型,并将其导入Fluent中进行迭代计算,左右两边障碍物布置如图10所示,随着飞行器的前向飞行,左右两个半球形障碍物分别移过左右机翼下方。
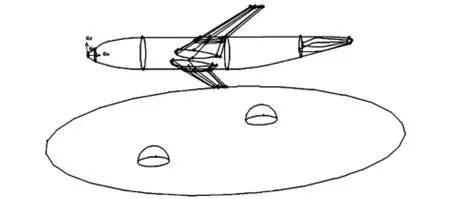
图10 侧向障碍物布置图Fig.10 Lateral obstacle arrangement plan
飞行路径地面存在侧向不对称障碍条件下,气动参数收敛历程如图11所示(由于篇幅所限,仅给出侧力系数收敛历程图)。可以看出,迭代计算有较好的收敛解,在n=150步后阻力就已基本收敛。
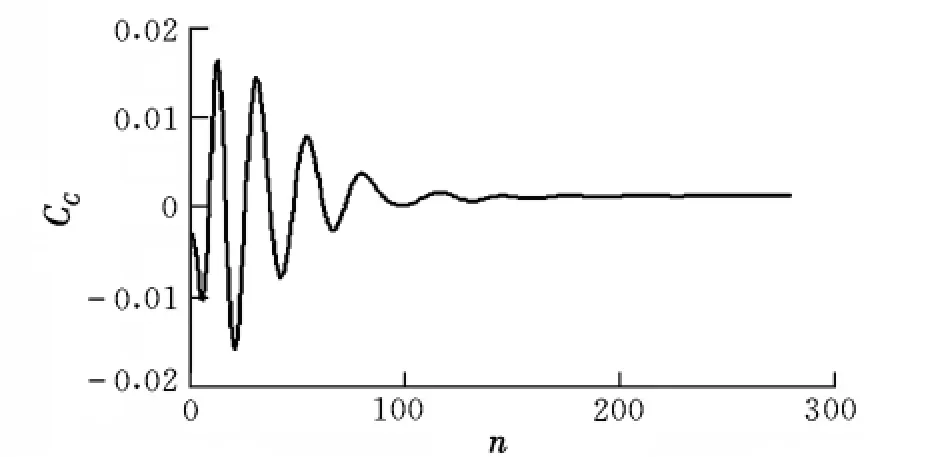
图11 侧力系数收敛历程Fig.11 Convergence response for lateral force coefficient
针对障碍物位置计算得到各个位置点飞行器气动参数收敛值,得到随大型飞机在复杂野战环境下超低空飞行的气动参数变化曲线如图12和图13所示。
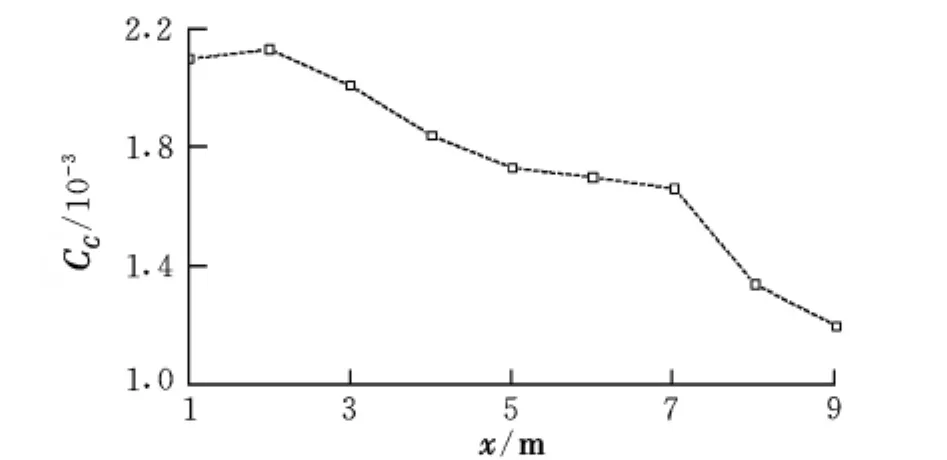
图12 侧力系数曲线Fig.12 Curve of lateral force coefficient
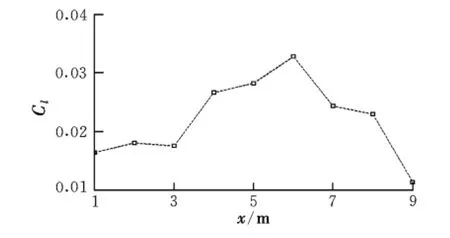
图13 滚转力矩系数曲线Fig.13 Curve of roll moment coefficient
可以看出,随着飞机向前飞行,左右两个半球形障碍物对侧力和滚转力矩系数产生了较大影响,尤其是滚转力矩系数,由于受到左右机翼下方气流的不规则挤压,地效作用对飞机的镜像托举力出现振荡变化,从而使得飞行器在横侧向上受力发生非线性变化,机翼绕x轴出现摇摆现象。
对于飞行器地面效应问题,大多数学者认为地面效应的存在对横侧向的扰动起到抑制作用,横侧向的稳定问题可以忽略不计[7],但如果在地面飞行轨迹上出现较大且不对称的横向障碍,飞行姿态可能出现短时摇摆现象。大型飞机翼展较大,超低空飞行操纵余度较小,极易造成机翼翼尖触地危险。
3.3 野战环境下超低空飞行控制问题
由上述数值仿真及相关分析可知:大型飞机在恶劣战场环境下完成超低空飞行动作过程中,飞行高度较低,飞行员操纵余度较小,针对不可避免的地面障碍物,很容易在纵向和横向发生各种触地危险,而这将导致机毁人亡的事故。
由于大多数飞机在控制律试飞中不考虑低空情况,这一飞行过程需要依靠飞行员手动完成,风险较大。为了适应现代战争中战机高复杂环境下飞行的要求,需要对此过程进行控制律的研究,分析飞行过程特点,针对地面复杂环境的不确定性所造成的模型突变、升力不对称,设计具有宽适应性的控制策略,保证在复杂非正常环境下的平稳控制和飞行安全,本文的下一步工作将围绕此方面内容开展研究。
4 结束语
本文针对现代战争条件下大型飞机进行复杂超低空飞行任务,研究地面各种不同障碍物情况下动力学参数的变化规律。根据实际战场环境中常见的地形地貌特征,在Gambit网格建模工具中分别搭建了典型纵向和横向障碍物的模型,通过Fluent流体数值模拟工具对超低空飞行过程中几个重要气动参数进行了计算,并对数据结果进行了分析,指出其物理过程特点,探讨了这一特定飞行过程的飞行控制方法。研究结果对战场环境下飞行器超低空飞行特点研究和后续飞行控制律的设计有一定的参考价值。
[1]崔尔杰,韩光维.地面效应空气动力学研究[C]//2003年空气动力学前沿研究论文集.北京:宇航出版社,2003:1-7.
[2]Kim H J,Chun H H,Jung K H.Aeronumeric optimal design of a wing-in-ground-effect craft[J].Journal of Marine Science Technology,2009,14(1):39-50.
[3]Lee S H,Lee J.Optimization of three-dimensional wings in ground effect using multiobjective genetic algorithm[J].Journal of Aircraft,2011,48(5):1633-1645.
[4]林海.飞机地面效应及其试飞方法[J].飞行力学,1996,14(4):52-58.
[5]杨小平,邓建华.受地效影响飞机起飞着陆运动模型的参数辨识[J].飞行力学,1997,15(4):30-34.
[6]Brodersen O,Sturmer A.Drag prediction of engine-airframe interferenceeffectsusingunstructured Navier-Strokes calculation[R].AIAA-2001-2414,2001.
[7]Chun H H,Chang C H.Longitudinal stability and dynamic motions of a small passenger WIG craft[J].Ocean Engineering,2002,29(10):1145-1162.
