飞机常规机动仿真的过载控制模型设计研究
2013-07-25李嘉林胡孟权
李嘉林,胡孟权
(1.空军工程大学 理学院,陕西西安 710051;2.空军工程大学航空航天工程学院,陕西西安 710038)
0 引言
飞行仿真中通常采用飞机舵面偏角作为输入,解算飞机的六自由度动力学模型[1]来得到飞机运动的仿真结果。在研究空战战法时,飞机机动动作往往先是设想所期望的机动动作,如筋斗、盘旋等,然后由仿真模型解算出运动参数的准确值。这种情况下需要采用与预期机动动作联系更为直接的输入参数,即采用控制飞机法向过载、航迹滚转角和速度为输入的动力学模型进行运动仿真。文献[2]建立了该类仿真动力学模型,获得了过载等输入对应的飞机六自由度运动参数。实现预期的机动动作,实际上就是以输入量为控制参数,以实现要求的飞机运动参数或飞行轨迹为目标的闭环控制过程,当达到飞机机动的最终状态或满足机动过程的要求时,即实现了预期的机动运动仿真。
本文针对涉及盘旋、跃升、俯冲、加减速、筋斗、按航路点飞行等常规机动的控制量设计问题,设计了程序以实现机动运动的仿真解算。
1 运动仿真模型
飞机机动运动仿真模型的基本原理是依据飞机运动计算模型按照一定的输入控制量解算飞机的运动参数。运动仿真模型及其子模型的结构关系如图1所示。图中,动作控制模型与要计算的机动动作直接相关;运动计算模型解算飞机的运动状态参数;动力学约束解算模型能对运动控制量进行限制或修正;当满足动作结束条件时,动作仿真结束。

图1 飞机运动仿真模型流程图Fig.1 Flow chart of dynamic model of aircraft
2 过载控制律设计
文献[2]将机动运动仿真的输入控制量确定为(ny,γ,δt)|t或(ny,γ,Vtr)|t。其中,ny为飞机法向过载;γ为航迹滚转角[3];δt为油门位置;Vtr为真空速。完成预期的机动动作主要取决于对过载大小ny和过载方向的控制。对常规机动而言,可将动作分为航迹机动和经验机动两类。盘旋、按航路点飞行等机动的主要特点是航迹机动,要求过载的控制律满足飞行航迹的要求。筋斗、战斗转弯等机动的主要特点是经验机动,要求过载控制律符合飞行员操纵经验。跃升和俯冲等机动的特点则两者兼有。因此,过载控制律设计应将机动过程适当分段考虑,同时应对过载指令滤波,使之接近飞行实际。
2.1 水平盘旋和战斗转弯控制律
盘旋机动可分为进入、转弯和改平三个阶段。进入阶段是以适当的过渡过程使滚转角和过载达到盘旋要求的稳态值。改平阶段可用一定的规律将滚转角指令渐变到0,过载渐变到1。转弯阶段的控制律[4]如下:

式中,γc为滚转角指令;nyc为过载指令;R为盘旋半径;μ为航迹俯仰角;c11和c13为高度加权系数;c12为俯仰角加权系数,与速度和滚转角有关。控制律中引入了高度和航迹角增量控制,保证盘旋机动趋近同一高度,高度浮动很小。
战斗转弯是以最大过载快速改变航向,达到指定航向的机动。战斗转弯的进入和改平段与盘旋基本类似,转弯段直接给定要求的滚转角指令γc,过载指令则以当地最大可使用过载为指令值。机动时高度变化量与飞机获得的γ值有关。
2.2 筋斗机动控制律
正筋斗的滚转角指令为零,尽量保持飞机机翼水平。过载控制分段与飞行员操纵习惯密切相关,可分为慢进入、快速拉起、保持翻转、俯冲拉起和改平五个阶段。其中,快速拉起使用筋斗的最大过载,保持接近等俯仰角速度翻转;俯冲拉起使用适当的过载,并考虑速度与发动机状态的合理程度,使速度接近进入速度;改平段需要精确调整过载,既能使飞机快速改平,又不至于再次跳起。主要过载控制律如表1所示。表中,θ为筋斗控制俯仰角,定义在0°≤θ<360°区间;θ1由慢进入阶段的时间t1确定。

表1 筋斗过载控制律Table 1 Load control law in loop
斜筋斗过程与正筋斗过程的进入条件相同,使用最大过载可适当减小。如斜筋斗滚转控制进入时航迹滚转角为10°~15°,在顶点滚转角约为-150°。筋斗机动中根据过载ny解算控制滚转指令,以保持筋斗在斜平面内运动。
2.3 按航路点飞行控制律
按航路点飞行定义为飞机按空间点的连线飞行,航路点的连线确定了飞机航迹的应飞航向和航迹倾斜角,因此,模型要确定到达一个航路点前的提前转弯点。到达转弯点的后续过程为转弯段,当航向差较小时为调整飞行段。建立按航路点飞行控制模型的关键在于尽可能地贴近航路点连线飞行,并保持飞行姿态的平稳度。设计过载控制律应考虑平稳转弯要求和航线飞行高度要求。滚转角控制指令如表2所示。表中,Δφ为航迹方位偏差;Δγ为接近航线的控制量,正比于飞机距离连线的垂直距离,比例系数为0.0333(°)/m。
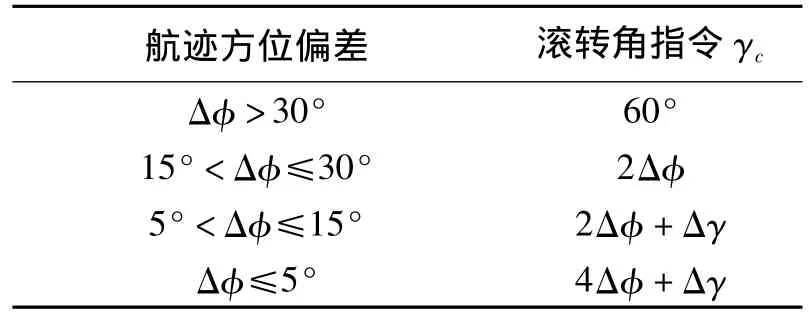
表2 按航路点飞行滚转角控制律Table 2 Roll angle control law in route flight
过载控制指令如下:

式中,Δμ为俯仰角差;ΔH为高度差;q为俯仰角速度。控制律加入了高度和俯仰角速度反馈量,使得模型较好地保持了要求的飞行高度和尽量小的俯仰姿态摆动。
2.4 跃升和俯冲机动控制律
跃升机动控制律设计要考虑拉起过程并满足给定的跃升角,以及控制改平后高度符合要求。跃升分为快速拉起段、等角度爬升段和改出段。设计根据跃升角的大小确定最大使用过载。拉起段以2~5 s达到最大使用过载,如果未达到要求的跃升角,则采用等角速度旋转控制飞机达到跃升角μys。等角度爬升则控制保持爬升角,速度变化由推力、重力和气动力确定。在等角度爬升段计算改出的高度范围,用插值法确定改出的具体时机,保证改出平飞后的高度满足跃升高度的要求。各段控制律如表3所示。

表3 跃升过载控制律Table 3 Load control law in zoom
根据飞行员习惯,当跃升角度较大时(如大于60°)可采用半滚后拉平再翻转的改出方式。这时需考虑滚转角指令的两次180°翻转,同时在改平正飞后应考虑航向的调整,使其回到滚转前的航向。
对于等速爬升机动过程,则要求保持进入动作初始时的速度进行爬升。过载控制分段与跃升时相同,不同的是在等角度爬升段使速度保持在要求值,同时解算推力约束条件,确保发动机能力是足够的。
俯冲机动控制律的设计思路与跃升机动类似。
2.5 水平直线飞行控制律
水平飞行包括加减速机动动作。速度的变化主要取决于发动机推力状态的变化。过载控制律应起到保持高度的作用,滚转角控制律应起到修正航向的作用。考虑到该过程航向偏差较小,滚转指令设计如表4所示。
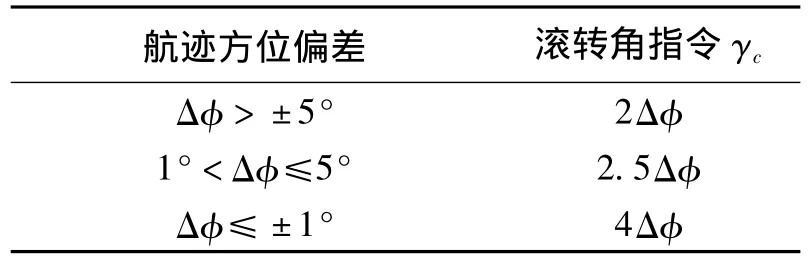
表4 直线平飞滚转角控制律Table 4 Roll angle control law in straight level flight
过载指令为:

3 动力学约束的处理
由于先设定预期的机动动作,难免会出现设计动作不符合飞机固有的动力学特性的情况,如盘旋时速度过大而要求的盘旋半径较小,则可能在仿真解算中遇到飞机最大使用过载限制的运动约束。在仿真解算中设置的运动约束包括平飞速度高度包线限制、发动机推力不足限制、最大使用过载限制、最小机动表速限制以及各机动仿真模型对动作设计的限制。
仿真解算过程中对运动约束问题分两种处理办法。一种办法是约束导致不能继续解算,或完成的动作不满足设计要求时,模型停算并通知计算时遇到具体约束条件,用以调整或重新设计动作再进行解算,如推力不足以保持要求的飞行速度,或速度小于最小机动表速等。另一种办法是在仿真解算中约束降低会降低机动能力但不影响动作完成时,模型自动以飞机最大能力完成动作,如筋斗中过载要求过大,则模型以最大可用升力系数确定机动过载。
4 仿真算例分析
以某型飞机数据为例建立运动计算模型和运动约束模型,在飞机使用范围内以各种速度、高度初始状态,并考虑适当的风速进行了盘旋、跃升、俯冲、加减速、筋斗、斜筋斗、按航路点飞行等机动的验算,仿真反映出的飞行性能与飞机原始性能数据相吻合,仿真机动动作参数与预期机动设计要求相一致[5-6]。水平盘旋、水平直线加减速过程中高度变化幅度小于30 m;上升或下降过程达到高度的误差小于5%和不大于60 m;筋斗机动符合飞行员操纵习惯,定点速度和高度与飞行员经验描述相吻合。以跃升为例,发动机最大状态,风速为向北2 m/s,向东3 m/s,向上2 m/s,其他条件见表5,图2为对应的跃升仿真水平距离和高度曲线。
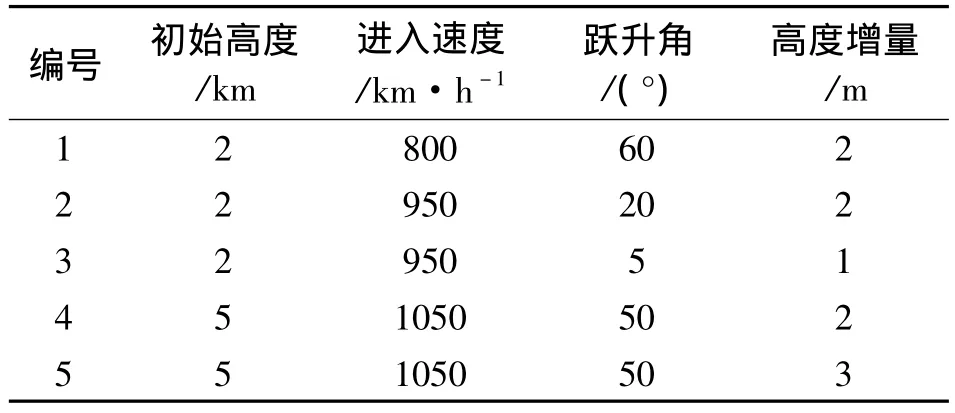
表5 跃升机动参数Table 5 Parameters of zoom

图2 飞机跃升仿真结果Fig.2 Results of aircraft zoom simulation
设计8个航路点为算例,如图3中按逆时针排序,虚线为航路点的连线,即实际飞行航迹的水平投影。结果表明,模型实现了绕过航路点、贴近连线的连续飞行解算,其准确度是可接受的。
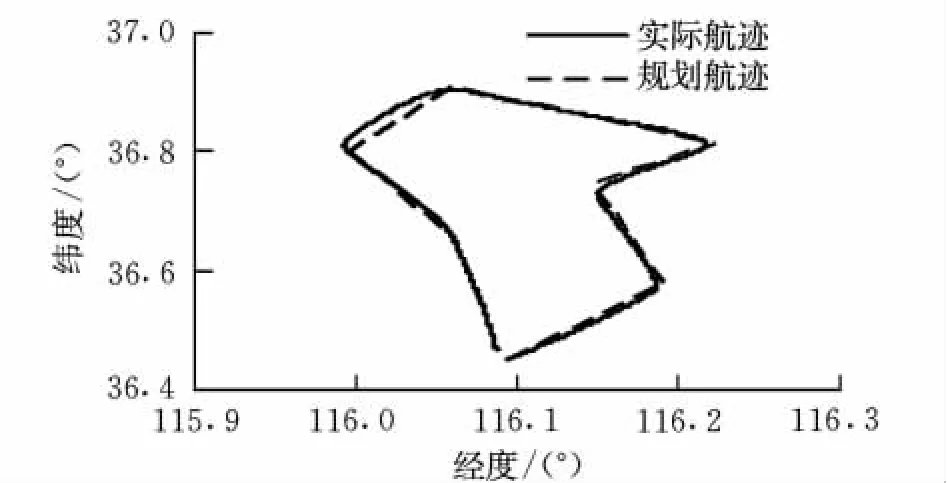
图3 按航路点的飞行航迹Fig.3 Flight path in route flight
5 结束语
采用法向过载、航迹滚转角和速度,或采用法向过载、航迹滚转角和发动机推力状态作为控制输入,能够较好地适用于机动动作设计。通过对控制量、控制律的设计和验算,说明本文采用的研究方法是合理的,所设计的控制律可以满足常规机动的仿真要求,具有一定的实用价值。
[1]陈廷楠.飞机飞行性能品质与控制[M].北京:国防工业出版社,2007:106-121.
[2]李嘉林,胡孟权,徐浩军,等.基于实现预期空战机动的飞机运动模型建模[J].空军工程大学学报(自然版),2013,14(1):1-4.
[3]航空气动力手册编写组.航空气动力手册[M].北京:国防工业出版社,1975:28-35.
[4]刘勋,高正红,商重阳.空战仿真中机动控制模型研究[J].飞行力学,2007,25(1):34-38.
[5]Hoffren J,Sailaranta T.Maneuver autopilot for realistic performance model simulations[R].AIAA-2001-4376,2001.
[6]孔祥骏,商重阳,高正红.歼击机空战机动的仿真建模研究[J].西北工业大学学报,2007,25(3):331-335.
