基于飞行模拟的超低空空投操控方法研究
2019-01-14雒东超张晓敏王文星
雒东超 张晓敏 王文星
摘 要:根据飞行试验模拟验证的需要,基于分离体法,建立了超低空重装空投的过程模型,并同时建立了牵引伞模型,构建了较为完善的超低空重装空投飞行仿真环境。根据人在回路的超低空重装空投仿真试验结果,提出了超低空重装空投过程的任务流程和驾驶员操控方法。所得结论对空投过程驾驶员操控和任务的顺利进行具有重要的参考价值。
关键词:超低空 重装空投 飞行模拟 操控方法
中图分类号:V249.1 文献标识码:A 文章编号:1674-098X(2019)08(c)-0010-05
Abstract: In this paper, according to the needs of the flight test of simulation, Based on the separation body method, the ultra-low altitude heavyweight airdrop model was developed, the extraction parachute model was developed as well which made the ultra-low altitude heavyweight airdrop flight simulation environment much more perfect. According to the pilot-in-the-loop flight simulation results, the mission process and pilots handle method was given out. The results show that the method in this paper has important reference value for pilots handling and ultra-low airdrop mission.
Key Words: Ultra-low; Heavyweight airdrop; Flight simulation; Handle method
重裝空投本身是一项技术性要求非常强的任务,特别是超低空重装空投要求更加严格。通过实际的空投作战训练来提升空投作战能力,不但财力、人力、物力消耗较大,而且危险性较大。从国外重装空投,特别是超低空重装空投飞行人员的培养来看,一般都经历过地面模拟训练系统的训练阶段,这将大大减少不必要的物资消耗,并且能够在保证绝对飞行安全的同时提升飞行员操控技术水平。在重装空投过程训练方法与程序研究方面,国内研究几乎处于空白阶段,国外可查阅的少量文献主要是针对具体机型的空投试验报告。
本文结合某型运输机重装空投任务的需求,并主要关注牵引空投,基于分离体法,建立了某型运输机超低空牵引空投过程模型。依据重装空投模拟器仿真试验结果,并参考国外重装空投试飞实验报告的相关结论,提出了超低空重装空投过程的任务流程和驾驶员操控方法,所得结论对空投过程驾驶员操控和任务的顺利进行具有一定的参考价值。
1 超低空重装空投过程建模
本节采用分离体的建模方法,考虑导轨坡度、飞机与刚体货物之间的时变作用力和牵引力的时变作用方向等多种因素,建立了某型机空投单件货物过程的数学模型。
1.1 坐标定义与假设条件
在深入分析空投过程货物舱内运动特性的基础上,本节提出如下假设条件。
(1)把地球视为惯性系统,即视为平面的和静止的;
(2)将某型机视为刚体,不考虑机翼、机身和机尾的弹性自由度,而且质量为常数;
(3)不计载机扰流和发动机喷流的相互作用;
(4)假设重力加速度不随飞行高度而变化;
(5)货物为质量均匀分布的刚体,质心位于轴上。
采用分离体的建模方法,即将货物的运动视为对载机运动的扰动,空投过程模型只需在载机常规的运动方程上加入货物的扰动项即可,而建立货物的运动方程,可视为刚体在非惯性系中的运动问题。
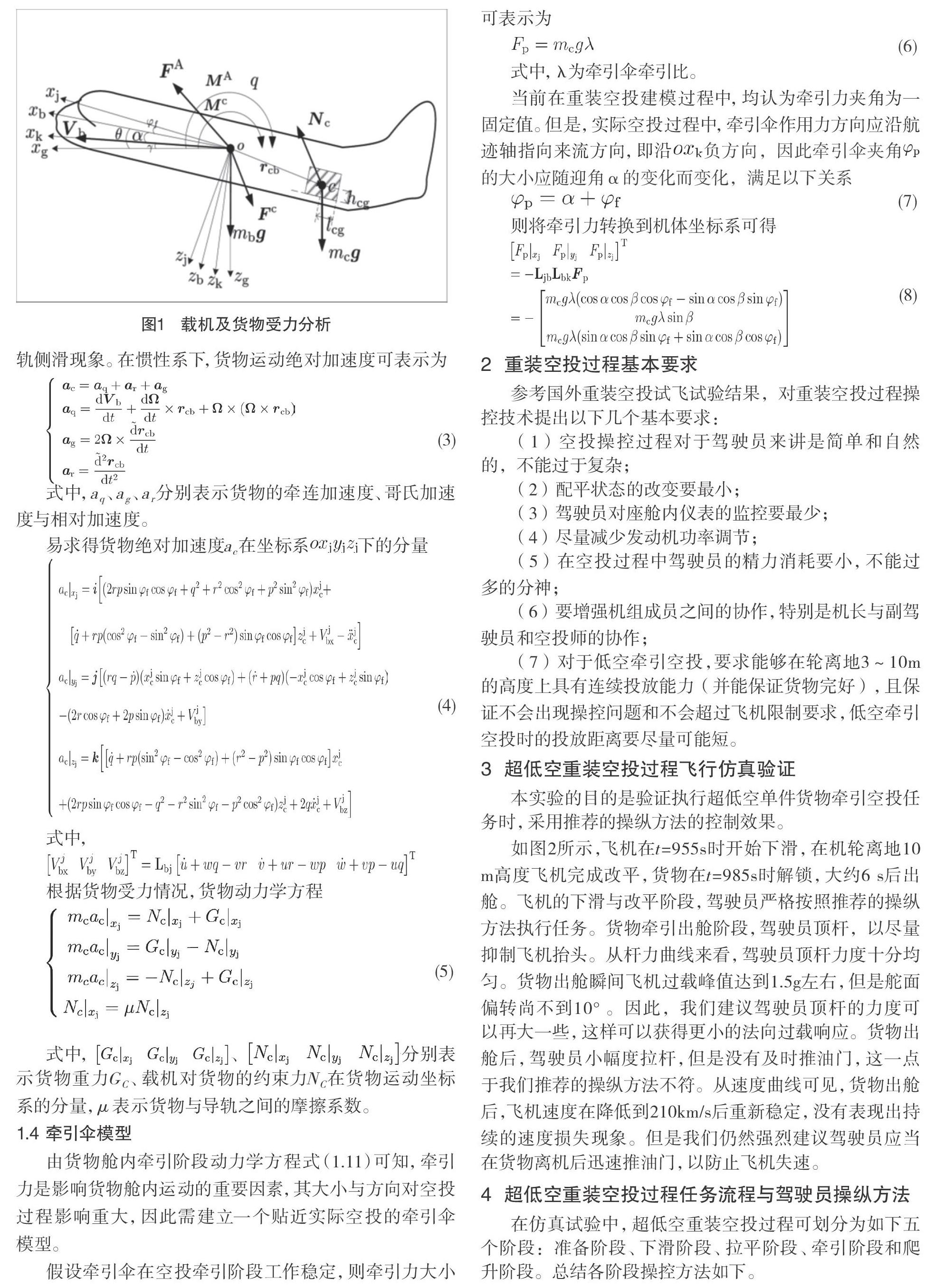
载机和货物的受力分析如图1所示。
图中,Nc表示载机对货物的约束力,与货物对对载机的干扰力Fc为作用力与反作用力关系,MA为载机气动力产生的气动力矩,MC表示货物对载机产生的干扰力矩,、表示刚体货物的1/2边长与1/2边高。
文中,以*|x*/z*表示*在坐标轴x*、z*上的分量。
1.2 载机动力学模型
2 重装空投过程基本要求
参考国外重装空投试飞试验结果,对重装空投过程操控技术提出以下几个基本要求:
(1)空投操控过程对于驾驶员来讲是简单和自然的,不能过于复杂;
(2)配平状态的改变要最小;
(3)驾驶员对座舱内仪表的监控要最少;
(4)尽量减少发动机功率调节;
(5)在空投过程中驾驶员的精力消耗要小,不能过多的分神;
(6)要增强机组成员之间的协作,特别是机长与副驾驶员和空投师的协作;
(7)对于低空牵引空投,要求能够在轮离地3~10m的高度上具有连续投放能力(并能保证货物完好),且保证不会出现操控问题和不会超过飞机限制要求,低空牵引空投时的投放距离要尽量可能短。
3 超低空重装空投过程飞行仿真验证
本实验的目的是验证执行超低空单件货物牵引空投任务时,采用推荐的操纵方法的控制效果。
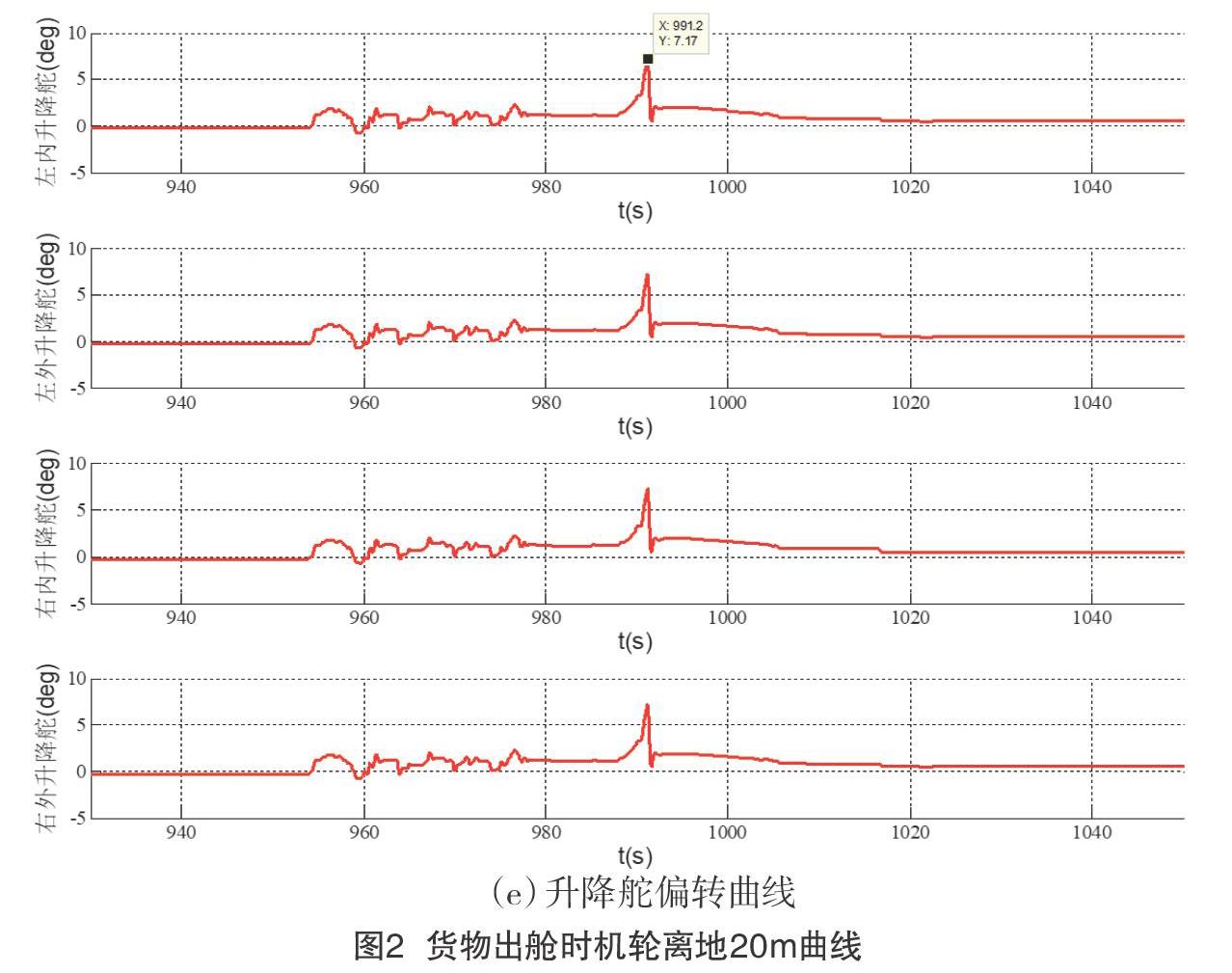
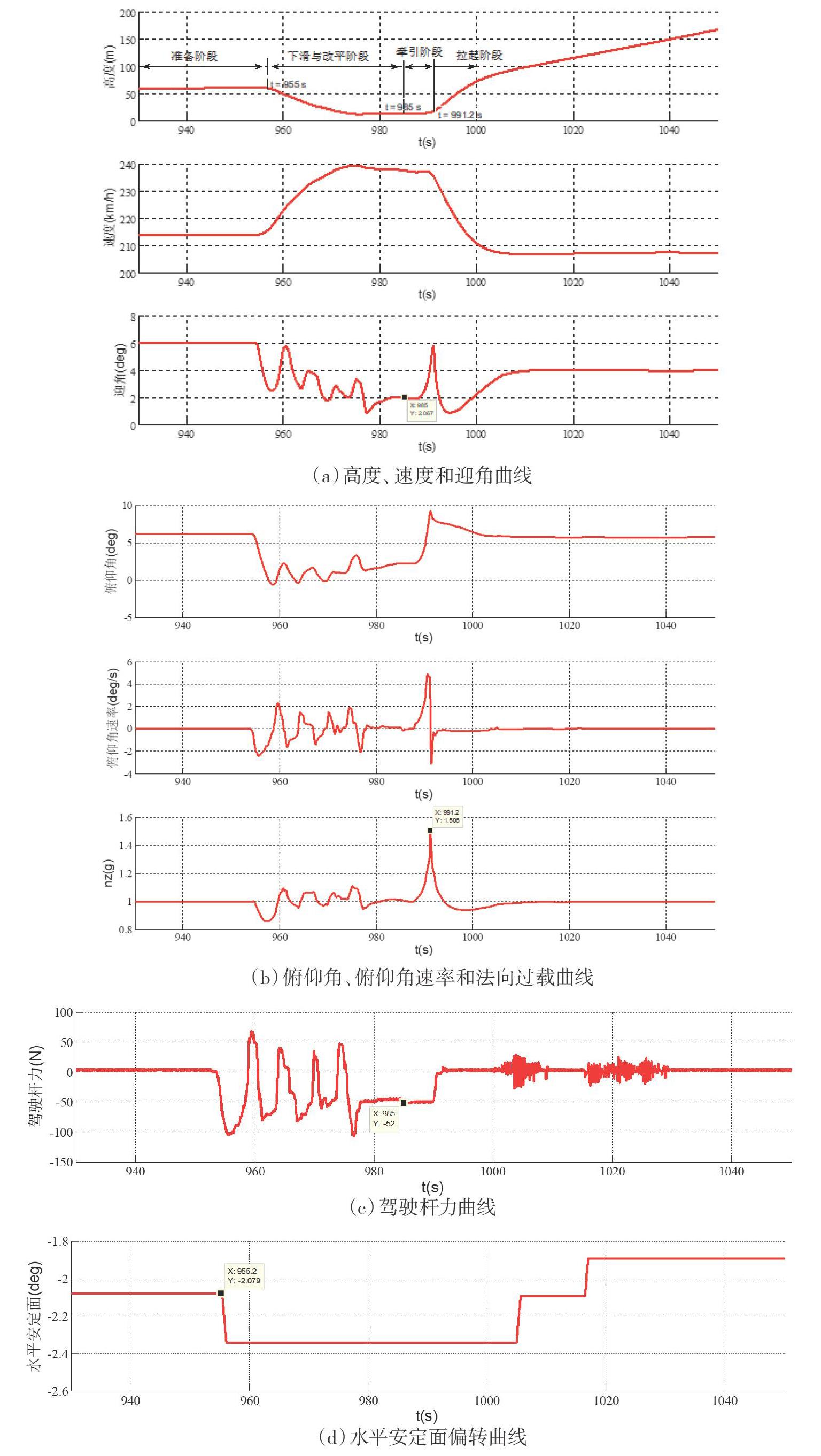
如图2所示,飞机在t=955s时开始下滑,在机轮离地10 m高度飞机完成改平,货物在t=985s时解锁,大约6 s后出舱。飞机的下滑与改平阶段,驾驶员严格按照推荐的操纵方法执行任务。货物牵引出舱阶段,驾驶员顶杆,以尽量抑制飞机抬头。从杆力曲线来看,驾驶员顶杆力度十分均匀。货物出舱瞬间飞机过载峰值达到1.5g左右,但是舵面偏转尚不到10°。因此,我们建议驾驶员顶杆的力度可以再大一些,这样可以获得更小的法向过载响应。货物出舱后,驾驶员小幅度拉杆,但是没有及时推油门,这一点于我们推荐的操纵方法不符。从速度曲线可见,货物出舱后,飞机速度在降低到210km/s后重新稳定,没有表现出持续的速度损失现象。但是我们仍然强烈建议驾驶员应当在货物离机后迅速推油门,以防止飞机失速。
4 超低空重装空投过程任务流程与驾驶员操纵方法
在仿真试验中,超低空重装空投过程可划分为如下五个阶段:准备阶段、下滑阶段、拉平阶段、牵引阶段和爬升阶段。总结各阶段操控方法如下。
4.1 准备阶段操控方法
飞机进入空投区域后,下滑前的一段时间是超低空空投准备阶段。准备阶段的操控方法为:
放下起落架、打开舱门、放下襟翼。飞行员调整发动机功率,按1.5倍失速速度配平飞机,保持飞行高度100m,保持水平飞行所需推力进场。空投师应集中精力,等待飞行员发布空投指令。当投放货物时,我们建议飞行员调整油门将飞机速度稳定在250km/h,保持高度100m,迎角稳定在4~5°之间,襟翼F40,水平安定面偏转-2.1°。
由于升降舵在货物牵引出舱阶段是主要操纵面,因此,准备阶段应保持升降舵处于回中状态,配平时一般不操纵升降舵。
国外空投试验中要求准备阶段飞机配平后,俯仰角应保持在2~4°的范围内。但是,某型飞机以1.5倍失速速度飞行时,无法保证俯仰角在2~4°范围内。事实上,我们通过实验发现,若飞机在准备阶段以1.5倍失速速度飞行,保持高度100m,则飞机拉平到3~10m目标高度时,俯仰角即可落入2~4°区间,满足货物牵引条件。
4.2 下滑与拉平阶段操控方法
驾驶员操纵升降舵使飞机按指定下降率下滑。我们建议初始下滑阶段,保持飞机下降率在3~4m/s;在距离目标高度约20m时,逐渐减小下降率,并保持在0.1~0.5m/s范围内。下降飞行中,飞行员通常不必调节发动机功率。因为,飞机从100m高度开始下降,其速度变化十分有限。当下降到合适的位置时,驾驶员的注意力开始转移到外面,不再监控速度的变化;在离目标高度大约10m时开始渐渐地改平,之后,要避免飞机轨迹做大的上下波动,以避免飞机触地;飞机拉平后,由驾驶员下达口令“空投”,此时,空投师按压空投开关,将货物解锁。
飞机拉平后俯仰角应保持在2~4°的范围内。如果配平后俯仰角超过4°,由于飞机的晃动将容易导致机舱斜板触地;俯仰角大于2°时,有利于加速货物向后移动,特别是在重力空投或低牵引比情况下,配平俯仰角应得到特别关注。此外,货物离机后,飞机总重突然变轻,重心前移,低头俯仰力矩突然增大,此时俯仰角有可能突然变成负值,从而导致强力的触地并损坏前起落架。
4.3 牵引阶段操控方法
牵引阶段主要通过升降舵操控飞机,使其相对配平状态的改变要最小,一般不调节发动机功率。下文主要讨论牵引阶段升降舵的操控要求。通过我们反复的实验,提出如下的操控要求。
空投牵引阶段需要驾驶员应迅速持续顶杆以减缓飞机的抬头,保证飞机法向过载不至于太高,使飞机相对配平状态的改变尽量小。在所有空投模式中,驾驶员应该使用这种操纵技术(迅速持续顶杆);牵引空投重型货物时,一般不能够实现某一恒定俯仰姿态的保持,但是,只要迅速推杆使飞机一直保持较小的俯仰角速率,就可以得到满意的飞机响应;牵引阶段飞机会出现速度损失,但是由于牵引阶段时间较短,因此,速度损失幅度不大。为了减小驾驶员操控负担,我们建议驾驶员不必实施任何的油门干预。当确定货物离机(牵引阶段结束),驾驶员应迅速推油门杆,调整发动机功率,防止飞机失速。
我们发现,若牵引阶段保持油门杆处于松浮状态,那么货物出舱后极易出现飞机失速现象。这种情况下,即使迅速将油门推到最大位置,也很难补偿速度损失。国外进行空投试验时要求牵引阶段采取“大而快速”的升降舵操纵输入来抑制飞机的抬头。但是反复实验表明,并不需要非常大的升降舵输入就可以保持很小的俯仰角速率。在投放最大质量空投任务时,也未出现舵面满偏的情况。
4.4 爬升阶段操控方法
驾驶员一旦确定货物离机,应立即推油门(防止飞机失速),并操纵飞机以大约15°俯仰角爬升。如果需要飞越障碍,则驾驶员拉杆的动作要大且迅速,但始终要注意飞机不能超过2g的法向过载限制。在飞機越过了大的障碍后,就可以结束爬升。
5 结语
本报告依据某型飞机重装空投模拟器仿真实验结果,并参考国外重装空投试飞实验报告的相关结论,提出了超低空重装空投过程的任务流程和驾驶员操控方法,具体工作如下:
(1)建立了超低空牵引空投过程模型;
(2)将超低空重装空投任务流程划分为准备、下滑、拉平、牵引和爬升五个阶段,提出了各个阶段飞行员和空投师的操控规范;
(3)依托大型模拟设施进行了人在回路的超低空牵引空投操纵方法的飞行仿真验证。
本文推荐的操纵方法能够保证超低空空投任务顺利完成,且对驾驶员来说这种操纵方法是容易掌握的。实验结果充分地验证了操纵方法的有效性和可实现性。
参考文献
[1] Eke F O, Mao T C. On the dynamics of variable mass system[J]. International Journal of Mechanical Engineering Education, 2002, 30(2): 123-137.
[2] Thomson W T. Introduction to Space Dynamics[M], Dover Publication, Inc., 1986.
[3] Eke F O. Angular Momentum and Multibody Dynamics[J]. Advances in Astronautical Sciences, 1991, 75(1): 365-376.
[4] Eke F O, Cervantes E. Dynamics of Axisymmetric Rockets in Free Flight[J]. Journal of Dynamic Systems, Measurement, and Control, 1998, 120(3): 410-414.
[5] Eke F O, Mao T C, Morris M J. Free Attitude Motions of a Spinning Body with Substantial Mass Loss[J]. Journal of Applied Mechanics, 2004, 71(2): 190-194.
[6] 胡兆豐, 肖业伦. 货物在货舱内移动时飞机运动的研究方法[R]. 北京航空学院科学研究报告. BH—B550. 1980
[7] Chen Jie, Shi Zhongke. Aircraft Modeling and Simulation with Cargo Moving Inside[J]. Chinese Journal of Aeronautics, (22).191-197. 2009
[8] 欧阳绍修,丁重舜.货物在货舱内移动时飞机动态特性的研究[J].飞行力学.10(1):77-86. 1992
[9] 胡兆丰, 肖业伦.“运八”飞机投放重型货物问题的数值计算和模拟实验结果. 北京:北京航空航天大学, 1980
[10]蔡满意. 飞行控制系统[M].北京:国防工业出版社. 2007, 40-41
[11]肖业伦.飞行器运动方程[M].北京:航空工业出版社,1987
[12]何植岱,高浩.高等飞行动力学[M].西安:西北工业大学出版社,1990
[13]王亚伟. 货物空投系统自动脱离锁成功脱离概率分析[J],航空学报,2010, 31(2):265-270
[14]Marc Rauw. FDC 1.2- A Simulink Toolbox for Flight Dynamics and Control Analysis[Report]. 2001
