平面度误差的遍历搜索算法
2013-07-10涂鲜萍雷贤卿王海洋崔静伟
涂鲜萍,李 飞,雷贤卿,王海洋,崔静伟
(河南科技大学机电工程学院,河南洛阳471003)
0 引言
平面是构成机械零件的重要几何要素之一,常作为机械零件检测和使用的基准。平面度误差是包容实际平面或实际平面任何一个指定范围,且距离为最小的两理想平行平面之间的距离。平面度误差的大小对机械产品的质量和使用寿命有着至关重要的作用,因此,对平面度误差进行快速、精确的评定具有重要的实际意义。
平面度误差评定的主要方法有最小二乘法、对角线平面法、三远点平面法和最小区域法等,其中,最小区域法评定平面度误差的结果最接近理想误差值,且符合国家标准。目前,关于平面度误差的最小区域评定算法还没有国家标准,不同厂家生产的同一类型的测量仪器得出的误差评定结果也有差异,有时还会出现较大的差别,亦即现有的评定算法不能满足新型测量设备对计算软件的要求[1]。国内外许多学者对平面度误差评定的算法进行了大量的研究,比较有代表性的算法有:蜂群算法[2]、遗传算法[3-4]、粒子群算法[5]、增量算法[6]、测点分类法[7]、区域搜索法[8]、计算几何法[9-10]和凸包法[11]等,这些成果都有一定的实用价值,对平面度误差评定算法的研究起到了积极的推动作用,但这些优化算法较难被实际操作人员所掌握,因此,研究一种简单直观、易于被广大质检计量人员掌握的平面度评定算法是十分必要的。
本文结合几何形状误差的定义及平面度误差的几何特征,提出了一种新的平面度误差评定算法——遍历搜索算法,可以实现平面度误差的快速准确评定。
1 遍历搜索算法的原理
首先,在被测平面的测量数据中选取3 个相距较远测量点为参考点,以3 个参考点为基准,在测量平面垂直的方向上上下等距扩展长度为f/2 的区域。将扩展后的区域f 做n 等分,构造出(n +1)个辅助点;根据3 点确定一个平面的原理,3 个扩展区域上的等分点依次连接,则可构造出(n+1)3个辅助平面。依次以辅助平面作为被测平面的假定理想平面,计算所有测量点与假设理想平面之间的距离的极差,可以得到(n+1)3个极差值;根据平面度误差的定义可知,极差值中的最小者就是被测平面的最小区域平面度误差。
2 平面度误差遍历搜索算法的步骤
设被测平面上的测量点坐标为Pi(xi,yi,zi),(i=1,2,…,N)。
2.1 构造辅助点
为确保平面度误差评定的准确性,一般选取被测平面上的边缘点作为参考点来构造辅助点。
设Pa(xa,ya,za)、Pb(xb,yb,zb)和Pc(xc,yc,zc)是被测平面上的3 个边缘点(见图1)。分别以点Pa、Pb和Pc为参考点,在平行于Z 轴(垂直于被测平面)方向上上下等距扩展长度为f/2 的区域(f 的值取最小二乘平面度误差值或依据加工精度估计),然后将扩展区域n 等分,可以得到(n + 1)个等分点,从而得到了辅助点Pk(xa,ya,zk)(k = 1,2,…,n)、Pm(xb,yb,zm)(m = 1,2,…,n)和Pt(xc,yc,zt)(t = 1,2,…,n)。所构造辅助点的Zk、Zm、Zt的坐标值计算由式(1)确定。
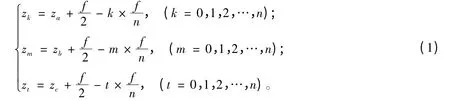
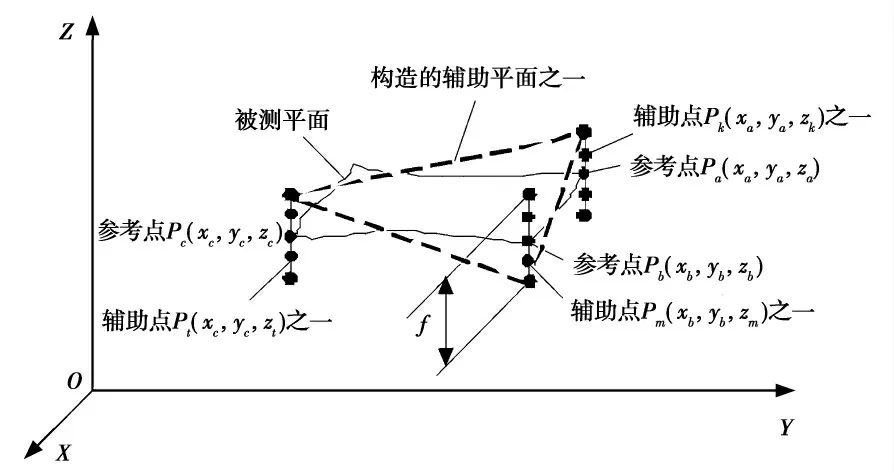
图1 平面度误差遍历搜索评定原理
2.2 构造假定理想平面
由3 点可以确定一个平面原理可知:所构造的辅助点Pk(xa,ya,zk)、Pm(xb,yb,zm)和Pt(xc,yc,zt)的组合可构成(n +1)3个假设理想平面。假设理想平面方程通式为Ax +By +Cz +D = 0,通过线性方程组可以得到(n +1)3个平面方程的系数Akmt、Bkmt、Ckmt和Dkmt:

其中,k,m,t=1,2,…,n。
2.3 计算所有测量点与假设理想平面之间的距离极差值
利用式(3)计算所有测量点Pi(xi,yi,zi)与每一个假设理想平面之间的距离,并计算出所有测量点与每一个假设理想平面之间的距离的极差值。有(n +1)3个假设的理想平面,就可以得到(n +1)3个距离极差值。根据平面度误差的定义可以知道,(n +1)3个距离的极差值中的最小者就是最小区域平面度误差,用F 表示。

3 实例验证

测量数据来源于文献[11],通过本文所提算法与其他算法对同一组数据处理结果的比较,验证平面度遍历搜索算法的正确性。
文献[1-2,10]对文献[11]中的测量数据(见表1)进行了处理,其评定结果如表2 所示。
采用本算法时,扩展区域取f=0.15 mm(f 的值依据文献[1]中的最小二乘平面度误差值来选取),初始参考点的选取分两种情况:一种取被测平面的边缘点P1(0.2,0.2,-0.064 50)、P15(0.6,1.0,-0.019 97)、P25(1.0,1.0,-0.021 21);另一种取边缘点P1(0.2,0.2,-0.064 50)、P21(1.0,0.2,0.057 73)、P25(1.0,1.0,-0.021 21)。在扩展区域上等分点数不同的情况下,算法的评定结果分别如表3 和表4 所示。
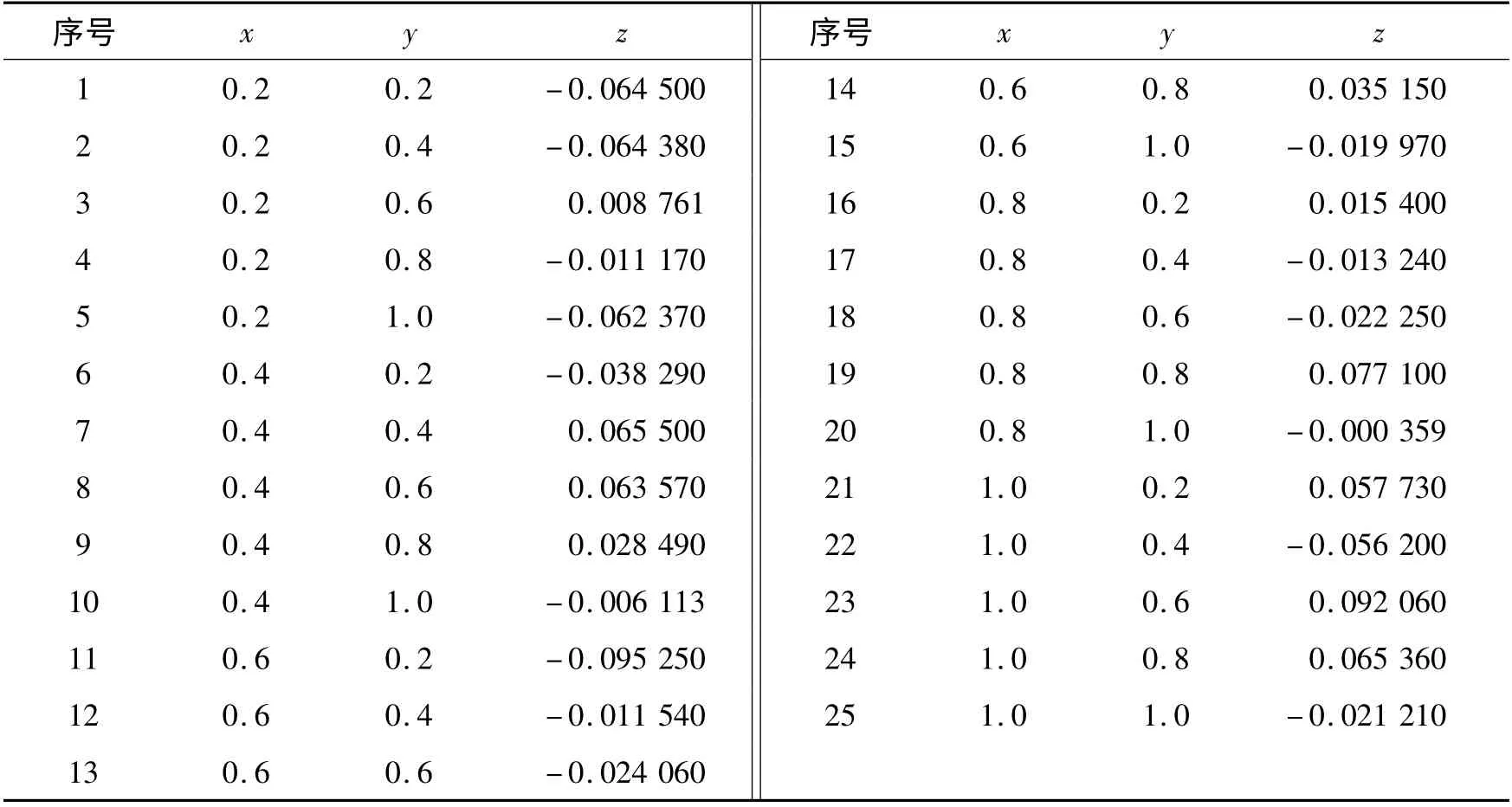
表1 测量数据

表2 不同算法的处理结果

表3 初始参考点为P1、P15、P25时的计算结果
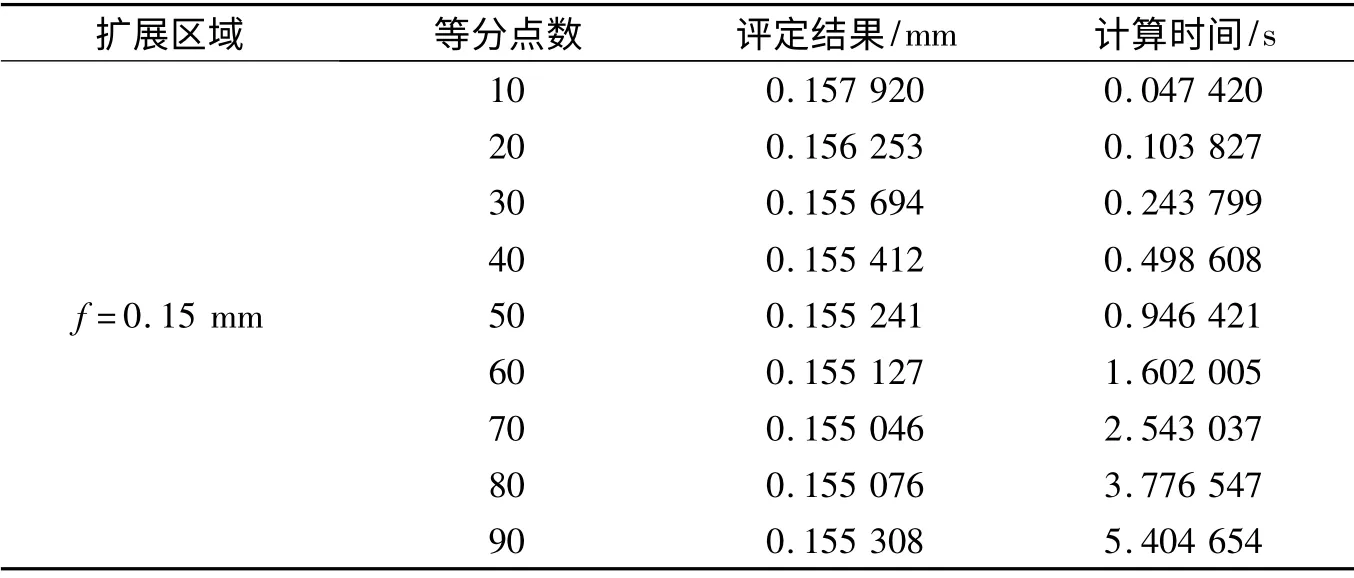
表4 初始参考点为P1、P21、P25时的计算结果
对比表2、表3 和表4 可以看出:对同一组数据,本文提出的平面度误差遍历算法结果与其他文献的计算结果相一致。
从表3 和表4 可以看出:初始点及扩展区域确定后,区域的等分点数越多,算法得到的误差值越小,但当等分点数达到一定程度后,有局部的反差(如表3 中等分点数20 和30,40 与50,60 与70 以及表4中等分点数80 与90),是由于等分方法不同、等分点不重合导致评定结果的局部发散,但随着等分点数的增加,得到的误差值越来越小的规律不会改变。
为使算法更具实用性,作者做了大量的试验,如在参考点不同、扩展区域不同、等分点数不同的情况下评定结果的比对等,表明在应用该算法时,扩展区域过大,需增加等分点数导致计算量增加,扩展区域过小会错失最优辅助平面而导致评定不准确。一般情况下,扩展区域取最小二乘平面度误差值或者与之相近的数值,等分点之间的距离(区域除以等分点数)取5 μm 左右,即可实现被测平面的纳米级评定。
4 结束语
结合平面度误差的几何特性,研究了平面度误差的遍历算法。该算法不要求测样点均匀选取,其原理简单,易于编程。实例验证表明:该算法具有较好的稳定性和准确性,为平面度误差的精确评定提供了一种新的评定方法。
[1] 温秀兰,赵茜.基于进化策略的平面度误差评定[J].仪器仪表学报,2007,28(5):832-836.
[2] 罗均,王强,付丽,等.改进蜂群算法在平面度误差评定中的应用[J].光学精密工程,2012,20(2):422-430.
[3] 温秀兰,宋爱国.基于实数编码的改进遗传算法在平面度误差评定中的应用[J].计量学报,2003,24(2):88-91.
[4] 崔长彩,车仁生,罗小川,等.基于实数编码遗传算法的平面度误差评定[J].光学精密工程,2002,10(1):36-40.
[5] 崔长彩,张耕培,傅师伟,等.利用粒子群优化算法的平面度误差评定[J].华侨大学学报,2008,29(4):507-509.
[6] 岳武陵,吴勇.平面度和直线度误差的快速评定—增量算法[J].计量学报,2008,29(2):120-123.
[7] 岳武陵,吴勇,苏俊.平面度误差的快速评定法—测点分类法[J].计量学报,2007,28(1):29-33.
[8] 田树耀,黄富贵,张彬.一种基于区域搜索的平面度误差评定算法[J].华侨大学学报,2009,30(5):506-508.
[9] Wen X L,Zhu X C,Zhao Y B.Flatness Error Evaluation and Verification Based on New Generation Geometrical Product Specification[J].Precision Engineering,2012,36(1):70-76.
[10] Samuel G L,Shunmugan M S. Evaluation of Straightness and Flatness Error Using Computional Geometric Techniques[J].Computer-Aided Design,1999,31(3):829-843.
[11] Traband M T,Joshi S,Wysk R A,et al.Evaluation of Straightness and Flatness Tolerances Using the Minimum Zone[J].Manufacturing Review,1989,2(3):189-95.
