电动化底盘动力转向系统多工况切换控制策略及性能试验
2013-02-23赵景波周冰李秀莲贝绍轶
赵景波, 周冰, 李秀莲, 贝绍轶
(1.江苏理工学院汽车与交通工程学院,江苏常州 213001;2.江苏理工学院计算机工程学院,江苏常州 213001)
电动汽车电动化底盘动力转向系统(electric power steering,EPS)是电动汽车设计装配过程中的关键部件之一,直接通过电动机输出给驾驶员提供助力,轻型小巧、装配及调整方便,而且噪声、废气污染小[1]。EPS系统运行过程中工况复杂多变,传统的控制策略难以兼顾EPS系统的多工况运行需求。驾驶员的转向操纵对助力、回正和阻尼工况的控制要求较高,难以协调不同工况的转向性能要求[2]。EPS系统应根据不同的行驶工况提供不同的控制算法,以获得符合实际工况的控制效果。基于助力、回正和阻尼工况区间,建立相应的控制模型和控制器结构,可获得比单一模型和单一控制器更好的控制性能。针对EPS系统的多工况控制特性,建立EPS系统动力学模型及其汽车转向动力学模型,建立EPS系统的动态行为描述,设计EPS系统切换控制结构,进行台架试验。
1 EPS系统多工况动态行为描述
针对EPS系统的多工况特征和协调不同工况下转向性能的要求,需建立EPS系统动力学模型和汽车三自由度转向模型,在文献[3]中进行了讨论,这里不再赘述。
EPS系统应根据不同的行驶工况提供不同的控制算法,以获得符合实际工况的控制效果。EPS系统控制结构如图1所示,将整个EPS系统划分为助力工况、回正工况和阻尼工况区间,针对各工况区间建立相应的控制模型和控制器结构,以获得比单一模型和单一控制器更好的控制性能[4-5]。

图1 EPS系统多工况控制结构Fig.1 Multi-state control structure of EPS system
建立 EPS系统的动态行为描述,为一个11元组

其中,M={m1,m2,m3,m4}为控制模式的集合,分别为助力工况及其柔性PID控制、回正工况及其模糊PID控制、阻尼工况及其Bang-Bang-PID控制和纯机械转向工况控制模式。
2 EPS系统多工况切换控制策略设计
2.1 EPS系统切换控制结构
针对EPS系统对助力、回正和阻尼工况的控制要求,设计切换控制结构,针对不同的控制模式,分别设计柔性PID控制、模糊PID控制和Bang-Bang-PID控制算法,通过控制算法的实时切换进行协调控制,如图2所示。

图2 EPS系统的切换控制结构Fig.2 Switched control structure of EPS system
系统输入在助力工况时为转向盘转矩和车速信号,在回正工况时为转向盘转角和电动机转角信号,在阻尼工况时为电动机转速和车速信号;切换控制器输出为电动机输出转矩Tm,与转向盘输入转矩和路面随机作用力共同构成EPS系统的输入;系统输出为横摆角速度ωr、车身质心侧偏角β和车身侧倾角φ,反映整车系统响应;外部环境输入主要是外界环境对系统的扰动作用;外部离散事件是由外界环境造成的离散事件,如EPS系统的启动/停止、系统故障造成的离散事件等;内部离散事件为控制模式的演化或系统故障造成的离散事件。
2.2 多工况控制器设计
在EPS助力工况中,助力盲区导致转向过程中的方向盘抖动,PID参数整定过程存在系统稳定性与准确性的矛盾。设计助力工况的无缝车速助力模式和柔性PID控制器。根据误差|ea|的运行状态,设定|ea|>ec,max=2 A 为大误差区间,1 A <|ea|<2 A、0.5 A<|ea|<1 A和|ea|<0.5 A为小误差区间,实时调整PID控制器的结构和参数,如图3(a)。
由于转向盘回正时的回正不足及回正超调现象,以及EPS系统存在非线性、时变性等不确定性因素,回正工况的控制参数修改不便、不能进行自整定。结合模糊控制与PID控制的优点,设计回正工况的Fuzzy-PID控制器,基于模糊规则在线修正PID控制器的参数,如图3(b)。
在汽车高速直线行驶(死区范围内)时,回正力矩较大,由于克服系统固有惯性及摩擦导致在中位附近产生抖动,引起驾驶员长时间的冲击,造成紧张和疲劳。利用Bang-Bang控制响应快速和PID控制精度高的优点,设计阻尼工况的Bang-Bang-PID 控制,根据误差|ed|的大小,|ed|> ed,max时采用Bang - Bang 控制,|ed|≤ed,max时采用 PID 控制,如图3(c)。

图3 各工况控制器设计Fig.3 Controller of each condition
3 试验设计及性能试验
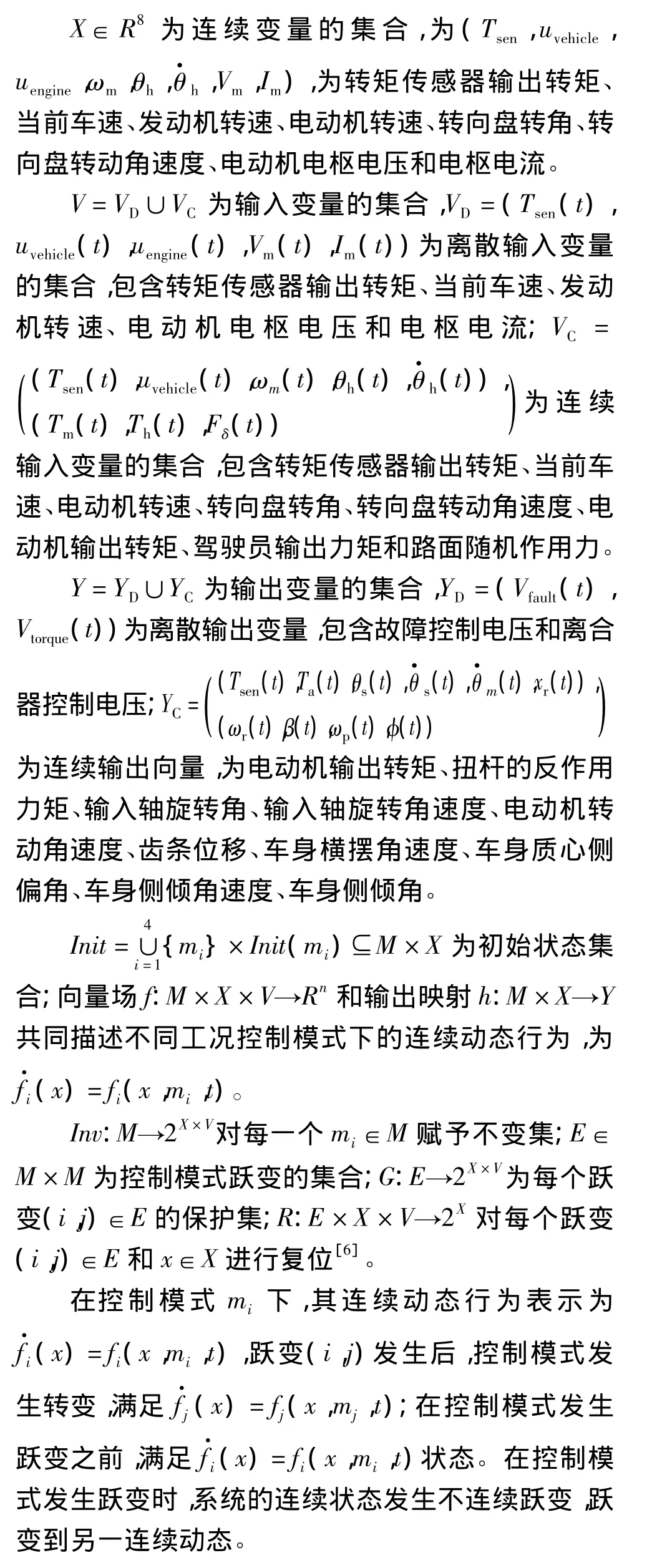
设计1/4车辆EPS系统试验台架,主要包括台架部分、助力电动机控制系统和信号采样分析系统三个部分,可模拟各种不同的路面状况并通过调速电机带动输入轴产生各种不同的车速[7-9],如图4。进行输入/输出特性试验、输入转矩/电动机电流特性试验和助力特性试验。
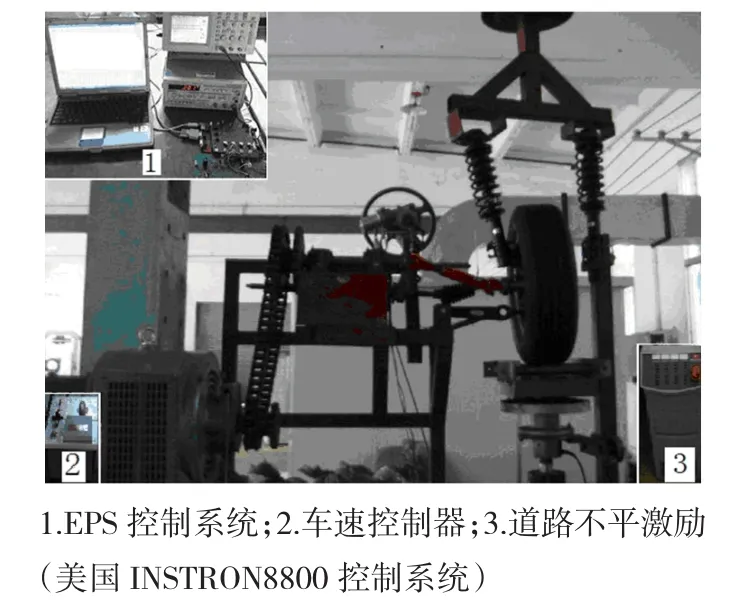
图4 EPS系统试验台架Fig.4 EPS test bed
在试验台架上,系统正常工作,向两个方向匀速转动转向盘,分别纪录0 km/h、30 km/h、60 km/h和90 km/h车速下的输入扭矩/输出拉压力曲线,如图5和表1,计算各车速下输入/输出特性的左右对称度,满足>90%的推荐指标。
在试验台架上,系统工作正常,分别记录0 km/h、30 km/h、60 km/h和90 km/h车速下输入转矩/电动机电枢电流特性曲线,如图6和表2,回程迟滞、非灵敏区及最大电流均满足指标要求[10]。计算各车速下输入转矩/电动机电枢电流的对称度,满足>90%的指标要求。

图5 输入/输出特性Fig.5 Input/output curve
图6 输入转矩/电动机电流特性Fig.6 Torque/current curve

表1 输入/输出特性左右对称度比较Table 1 Symmetrical comparison of input/output curve
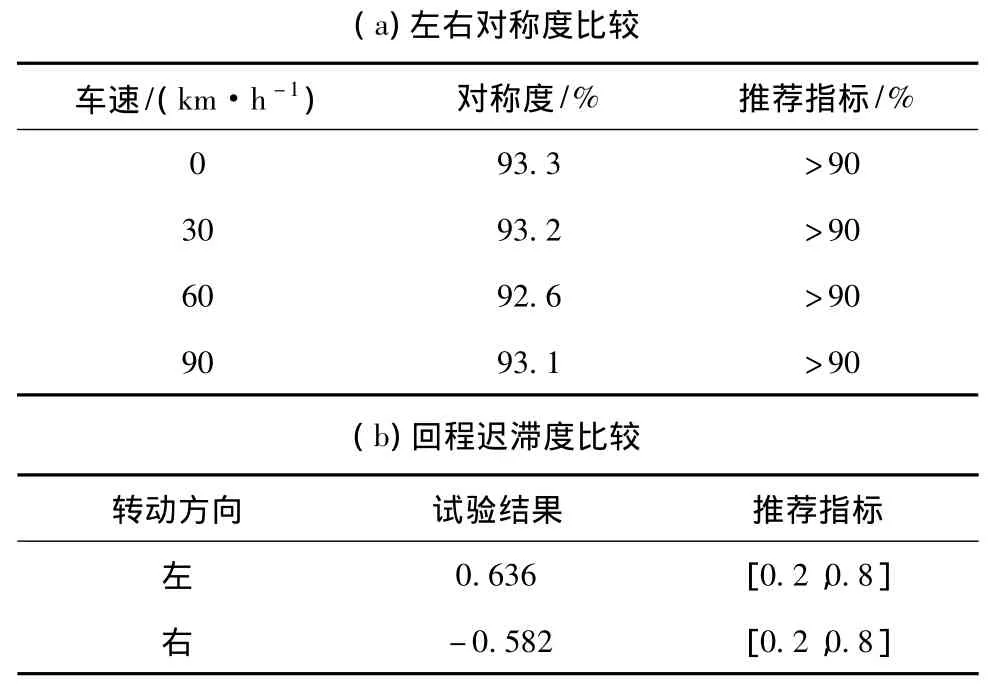
表2 输入转矩/电动机电流特性比较Table 2 Comparison of torque/current curve

(c)非灵敏区比较转动方向 试验结果 推荐指标左1.037 [0,2]右-1.068 [0,2](d)最大电流比较转动方向 最大电流 推荐指标左31.2 [30,35]右-30.7 [30,35]
在试验台架上,轮胎处于静止状态,转动转向盘到600°,采集无控制时的转向盘转矩随方向盘转角的变化曲线,以及切换控制时的转向盘转矩和电动机电枢电流随转向盘转角的变化曲线,如图7所示。

图7 0 km/h车速的助力特性曲线Fig.7 Assist characteristic curve at 0 km/h
在试验台架上,在5 km/h运行状态下,转动转向盘到600°,分别采集无控制和切换控制时转向盘转矩随转向盘转角的变化曲线,以及切换控制时对应的电动机电枢电流变化曲线[10],如图8所示。
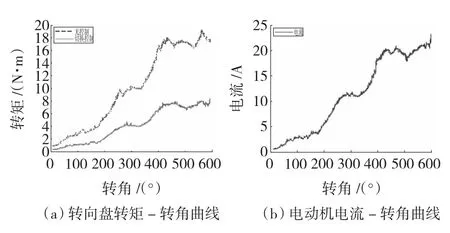
图8 5 km/h车速的助力特性曲线Fig.8 Assist characteristic curve at 5 km/h
助力特性测试结果如表3所示,结果表明,助力控制下的转向盘输入转矩得到降低,原地转向的转向轻便性提高了69.6%,5 km/h车速的转向轻便性提高了56.2%;并且随着车速的增加,EPS系统的助力效能降低,符合汽车 EPS系统助力特性的要求。

表3 助力特性结果Table 3 Testing results of assist characteristic
4 结论
1)电动汽车EPS系统作为电动汽车设计装配过程的关键部件之一,传统的控制策略难以兼顾EPS系统的多工况运行需求,难以协调并满足不同工况的转向性能要求,将整个EPS系统划分为助力、回正和阻尼工况区间,建立相应的控制器结构和参数,可获得比单一模型和单一控制器更好的控制性能。
2)建立了EPS系统动力学模型和三自由度转向动力学模型,设计了EPS系统的切换控制结构,针对助力、回正和阻尼工况分别设计了柔性PID控制、模糊PID控制和Bang-Bang-PID控制算法,在不同的工况下采用相应的控制算法实时切换和协调控制。输入/输出特性试验、输入转矩/电动机电流特性试验和助力特性试验结果满足推荐指标要求。
3)EPS系统的切换控制及其试验对于优化控制策略、增强控制功能和提高转向操纵安全性都具有重要的理论研究意义和工程应用价值。
[1] 管欣,宗长富,王化吉.汽车底盘动力学性能主观评价研究现状与展望[J].汽车工程学报,2011,1(3):159 -174.
GUAN Xin,ZONG Changfu,WANG Huaji.Current situation and prospect of research on subjective evaluation of vehicle chassis dynamics performance[J].Chinese Journal of Automotive Engineering,2011,1(3):159 -174.
[2] 赵景波.汽车EPS柔性PID控制系统理论、设计及实现研究[D].镇江:江苏大学,2009:63-72.
[3] 赵景波,周冰,李秀莲,等.电动汽车EPS曲线型助力特性的设计及试验[J].电机与控制学报,2011,15(12):96 -102.
ZHAO Jingbo,ZHOU Bing,LI Xiulian,et al.Design and test of curved assist characteristic for electric vehicle EPS system[J].E-lectric Machines and Control,2011,15(12):96 -102.
[4] 孙立军,陈龙,赵景波,等.汽车电动助力转向系统助力特性研究及试验[J].郑州大学学报:工学版,2007,28(4):117-121.
SUN Lijun,CHEN Long,ZHAO Jingbo,et al.Study on EPS assistance characteristics and vehicle tests[J].Journal of Zhengzhou University:Engineering Science,2007,28(4):117 -121.
[5] 马皓,毛兴云,徐德鸿.兼顾电感电流连续导通和断续运行模式的DC/DC电路建模和参数辨识[J].中国电机工程学报,2006,26(5):64 -69.
MA Hao,MAO Xingyun,XU Denghong.Modeling and parameter identification of DC/DC converters in both CCM and DCM mode[J].Proceedings of the CSEE,2006,26(5):64 -69.
[6] 赵洪山,米增强,牛东晓,等.利用混杂系统理论进行电力系统建模的研究[J].中国电机工程学报,2003,23(1):20-25.
ZHAO Hongshan,MI Zengqiang,NIU Dongxiao,et al.Power system modeling using hybrid system theory[J].Proceedings of the CSEE,2003,23(1):20 -25.
[7] 胡伟,温旭辉,刘钧.电动汽车电机驱动系统寿命模型[J].电机与控制学报,2008,12(6):670-674.
HU Wei,WEN Xuhui,LIU Jun.Lifetime model of motor drive system for electric vehicles[J].Electric Machines and Control,2008,12(6):670 -674.
[8] 姜艳姝,于晓洋.PWM驱动系统中的共模电压及抑制[J].电机与控制学报,2010,11(4):72-79.
JIANG Yanshu,YU Xiaoyan.Common-mode voltage and its cancellation in PWM drive system[J].Electric Machines and Control,2010,11(4):72 -79.
[9] 袁朝春,陈龙,江浩斌,等.车辆电动助力转向系统试验研究测试方法[P].中国:200710190076.5,2007-11-16.
[10] 《汽车工程手册》编辑委员会.汽车工程手册(试验篇)[M].北京:人民交通出版社,2001:252-277.
(编辑:张诗阁)