基于CATIA的玉米播种机样机建模
2012-11-22安徽农业大学工学院安徽合肥230036
孙 健 (安徽农业大学工学院,安徽 合肥 230036)
基于CATIA的玉米播种机样机建模
孙 健 (安徽农业大学工学院,安徽 合肥 230036)
根据玉米播种机的基本设计原则和机具要求,对玉米播种机的排种器、开沟器、镇压轮等进行分析设计,得出各零部件的几何参数,为后续基于CATIA的三维参数化建模提供理论依据。采用三维参数化造型软件CATIA对各零部件进行实体建模,并完成玉米播种机整机装配和干涉检查,以较为直观的方式显示玉米播种机中所有零部件的组装情况,可为实物装配路径的制定提供参考,有效地提高设计速度。
玉米播种机;CATIA;虚拟设计
传统的播种机设计要经过样机设计、样机试制、田间试验、改进设计、再试制等多个步骤。这种设计方法存在的缺点有:产品研制周期长、成本高,机构参数只能靠设计人员根据经验确定,在制造之前看不到零部件实物,许多问题只有在制造出产品以后才能发现,且不能进行预装配和干涉检验[1]。虚拟样机技术是为了解决传统的设计弊端,在产品开发过程中,利用现代计算机仿真技术,在计算机上建造出产品的整体模型,预测产品的整体性能,改进产品设计的一种技术[2]。使用该技术,工程师可以使用计算机软件对零部件进行特征建模并进行虚拟装配,从而获得机械系统的虚拟样机。在虚拟环境中真实地模拟系统的运动,观察并试验各组成部件的相互运动情况。使用这种方法可以在计算机上方便地修改设计缺陷,直至获得最优设计方案后,再制造出物理样机。
CATIA是IBM和Dassault System公司合作推出的CAD/CAE/CAM一体化软件,它的集成解决方案覆盖所有的产品设计与制造领域。CATIA的模块具有全相关性,在产品开发过程中对某一处进行修改,能够扩展到整个设计中,同时自动更新装配体、设计图纸以及制造数据所有的工程文档,方便快捷; CATIA便于装配管理,它可以利用一些简单直观的命令实现零件的装配,支持大型复杂装配体的构造和管理[3]。
本研究是基于现有播种机的使用情况,结合我国地块小、拖拉机动力小和农民购买力低等现状而设计的悬挂式小型玉米免耕播种机,以期满足我国实际生产的需要,该机可以一次性完成开沟、施肥、播种、起垄、镇压等一系列作业[4]。
1 基于CATIA的玉米播种机建模设计
1.1 结构特点与设计要求
由于国外农场的土地面积较大,拖拉机的功率也较大,所以免耕播种机一般是牵引式的,而且大多采用多梁结构和多排开沟器,各开沟器之间间隔较大,防堵性能较好[5-7]。本研究所设计的玉米播种机采用三点悬挂挂接在小型拖拉机上,该机主要由肥料箱、机架、开沟器、排种器、排肥器、镇压轮等部分组成。设计过程中主要考虑以下特点和要求:
(1)结合我国农业机械马力小的特点和实际的农艺情况,以满足我国使用需要的玉米播种机;
(2)为了避免土壤被压实,要减少播种机进入土地的作业次数,采用复式作业,一次进入作业地可完成将开沟、施肥、播种、起垄、镇压等工作;
(3)要求播种机有良好的仿形功能和稳定性,播量和播深均匀,具有播深调节装置,能实现整体和微量的调节[8];
(4)要求做到种肥分施,避免烧苗,且种子与肥料之间至少有5cm厚度的垂直土层;
(5)要求播种机上设计相应的镇压、起垄装置,以保证农田水分的要求,避免土壤水分的流失;
(6)为了方便作业和降低成本,要在满足功能要求和强度要求的前提下,尽量将整机结构设计紧凑,减轻整机的重量,节约使用材料,便于悬挂和田间运输。
1.2 虚拟样机设计方案

图1 虚拟样机设计路线
根据设计要求,虚拟样机采用图1所示的设计路线。
1.3 基于特征的参数化设计
在以CATIAV5R19为技术平台的零件实体建模技术中,特征是组成零件实体模型的基本元素,是描述产品信息的集合,也是设计或制造零部件的基本几何体。
虚拟设计中零件实体建模技术中的特征详细划分如图2所示。

图2 特征分类图
1.3.1 辅助特征
辅助特征主要包括工作轴、工作平面、工作点、构造特征和特征管理树,是进行基于特征的零件实体建模设计的辅助工具。
1.3.2 几何特征
根据创建方式的不同,几何特征可分为直接生成特征和草图特征。

图3 用抽壳特征完成的机架图
直接生成特征主要包括倒角特征、肋板特征、阵列特征、镜像特征和抽壳特征等,是直接在实体模型上创建的特征,是系统已定义好的参数化特征。直接生成特征的关键是要进行特征定位和定义特征变量化。在建模时,只需进行特征定位和输入特征变化量值即可形成该特征,大大提高了设计效率。草图特征是将草绘出二维轮廓线或横截面进行拉伸、旋转、扫描和放样形成的特征。如图3所示的机架零件就是利用抽壳特征完成的。
1.4 基于特征的零件实体建模流程
基于特征的零件实体建模流程如图4所示。

图4 零件实体建模流程图
1.5 零部件的实体建模
播种机的主要零部件包括开沟器、排种器、机架、镇压轮和传动装置等,其主要零部件的实体建模如图5至图9。

图5 开沟器装配图
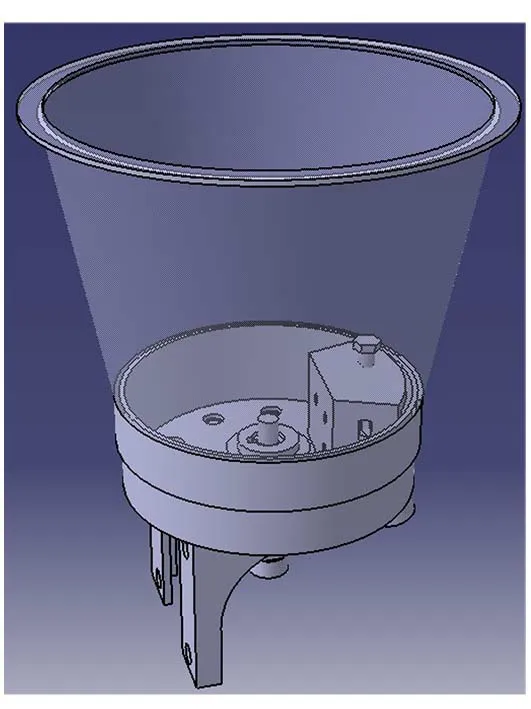
图6 排种器装配图
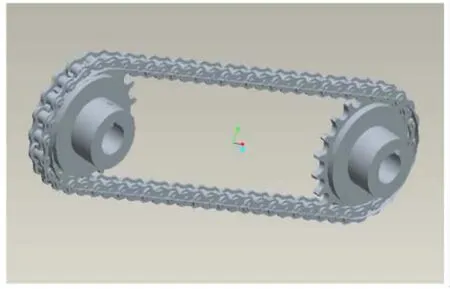
图9 链条装配图
2 玉米播种机的虚拟装配
虚拟装配就是将各零部件按照一定的设计关系组装在一起,使装配体能完成某一项功能。虚拟装配采用计算机仿真与虚拟现实技术在计算机上仿真装配的全过程,实现产品的工艺规划、加工制造,装配和调试。虚拟装配允许设计人员考虑可行的装配序列,自动生成装配规划,使产品的制造向着自动化、数字化的方向发展,虚拟装配是产品数字化定义中的一个重要环节。
目前,产品的装配设计有2种方法:一种是自底向上的设计,即先完成零部件的实体造型,然后装配成产品;另一种是自顶向下的设计,即从产品的功能的要求出发,先进行概念设计,然后进行装配结构设计,建立起约束驱动的产品设计模型,通过约束求解,获得满足功能要求的产品设计。
2.1 玉米播种机的虚拟装配方法
对于复杂装配体的虚拟装配设计,首先要对复杂系统进行结构分析,将其分解成若干个功能模块,然后分别进行装配。若某些功能模块结构仍较复杂,可重复分解,直至得到一系列简单的子系统。虚拟装配的顺序是先装配最底层也是最简单的子系统,然后将其作为一个整体装配到上一个较为复杂的功能模块。按照此法,分别完成各功能模块的装配,最后完成总装和干涉检验,以进一步检测虚拟装配的可靠性。此装配方法,经实践检验,可有效地提高设计和装配效率。
在现实中用铆接、焊接、螺栓连接等方式来实现装配,而虚拟装配则采用面与面之间的对齐、匹配、垂直以及销钉连接、圆柱连接、槽连接等装配关系来实现。在虚拟装配过程中应注意零件之间的约束关系,考虑零件在装配后应有的自由度,装配的结果直接影响后续的有限元分析和动态仿真。
基于上述分析,在玉米播种机的设计过程中,本研究采用了自底向上的装配方法。在虚拟装配前,首先对其进行结构分析,其系统的主要组成模块如图10所示;其次,完成开沟器、排种器、机架和地轮等全部零件设计和建模,然后分别独立完成其虚拟装配,并保存为相应组件,这就完成了系统最底层的虚拟装配;最后将各个模块的装配体汇总装配即可。玉米播种机总装配如图11 所示[9]。

图10 玉米播种机组成模块图

图11 玉米播种机总装配图
2.2 动态干涉检查
干涉检查是对虚拟装配效果的有效评价,对播种机装配体进行干涉检查可初步评价其结构设计是否合理,若无干涉则可以在现实中完成装配,否则需要通过公差分析来检验零件的干涉情况。发现问题时,可对模型进行修改,直到获得满意的结果,并可动态模拟装配体上零件的运动效果。通过虚拟装配可以及早地发现问题,并以较小的代价解决问题。
在CATIAV5R19平台上,通过对各部件的运动分析,利用干涉检查工具对播种机装配体进行全局干涉检查,发现整机运转正常,未出现有干涉的区域,表明不存在干涉,整机结构设计合理,只要各零件在加工时工艺得到保证就可以顺利地完成现场装配。
3 总结
应用CATIA软件对玉米播种机进行特征下的实体建模,进行零部件虚拟设计,最后完成了虚拟装配设计和干涉检查。以较直观的方式显示了玉米播种机中零部件的组装状况,优化了装配路径,可以有效地提高设计速度,缩短新产品的研发周期,提高产品设计质量,降低产品研发成本[10]。
[1]刘 飞,赵满全.基于Pro/E的膜下播种机排种装置的设计与仿真分析[J].农机化研究,2009,(1):53-55.
[2]王 侃,杨秀梅.虚拟样机综述[J].新技术新工艺,2008,(3):29-31.
[3]孙小明.基于有限元分析的AMT选换档机构研究与设计[D].合肥:安徽农业大学,2009.
[4]尹成龙,朱 林,吴元梓,等.基于SolidWorks的新型玉米播种机虚拟设计[J].农业科技与装备.2009,(4):58-60.
[5]ThomasJ.R,Hughes,Ernest Hinton.Finite element methods for Plate and shell Structures[M].Swansea,U K:Pineridge Press International,1986:75-96.
[6]Cormack C M,Monaghan J.2D and 3D Finite Element Analysis of a Three Stage Forging Sequence[J].Journal of Materials Processing Technology(S0924-0136),2002,127:48-56.
[7]姚宗路.小麦对行免耕播种机的研究:[D].北京:中国农业大学,2005.
[8]贾洪雷,马成林,孙裕晶.耕整种植联合作业工艺及配套机具[J].农业机械学报,2004,35(6):62-64.
[9]常 静,尹成龙.基于Pro/E的玉米播种机虚拟设计[J].机械研究与应用,2010,(6):97-98.
[10]虞 敏,徐 翀,俞 涛.复杂产品虚拟样机数据管理研究[J].计算工程与设计,2006,27(18):3403-3405,3435.
10.3969/j.issn.1673-1409(S).2012.08.014
TH122;S223.2
A
1673-1409(2012)08-S042-04
2012-08-01
孙 健(1975-),男,安徽安庆人,硕士生,副教授,主要从事农业机械设计研究。
