喷水推进自动化监控系统故障自诊断技术研究
2012-10-30陈天平曹士杰
袁 木,陈天平,曹士杰
(711研究所,上海 201108)
0 引 言
近年来,随着造船技术的快速发展,很多新型高速船舶安装了喷水推进装置。作为一种特殊的推进方式,喷水推进有别于传统的螺旋桨推进方式,具有推进效率高;抗空泡能力强;操纵性能优异;工作平稳、噪声低;适应变工况能力强、主机不易过载;适用于高性能船舶的性能和特点。
船舶的运动推力是通过喷水泵喷水的反作用力来获得的,并通过操作方向舵来实现转向运动,通过操作倒航斗来实现前进和后退[1]。典型的喷水泵见图1。

图1 喷水泵
喷水推进装置通常由进口流道、推进泵、操舵倒航机构、液压系统和控制系统5部分组成。喷水推进自动监控系统安全可靠地应用,并对出现的故障能够及时准确地进行诊断[2]是实现控制功能的重要保障。
船舶故障自诊断技术可以分为两大部分,一是设备故障和异常停机时,快速、准确地找到故障点,分析故障原因,排除故障,恢复正常运行。二是在船舶运行中,对关键设备的状态和零件的参数进行实时监测,根据参数的变化趋势,分析可能出现的问题,为采取防范措施提供依据。
结合故障自诊断技术和船舶自动化监控系统的特点,设计出基于总线控制技术的喷水推进自动化监控系统故障自诊断系统,该系统可以对喷水推进装置的运行状态进行在线监测,实时反馈故障报警,并根据故障的类型和发生的频率,提出设备的检修和维护建议。同时还可以根据系统存在的安全隐患,提前发出故障预警,减少突发事故,降低后期的维护成本。
1 喷水推进自动化监控系统
该系统以高速双体船为设计对象,在船左右侧体都配有独立的喷水推进装置,其系统见图2。

图2 喷水推进系统
系统的控制对象是喷水推进装置内的方向舵和倒航斗,方向舵控制船的左右转向,倒航斗控制船的前进和后退。其控制部件电磁阀位于泵舱内,通过控制电磁阀的开关来通断液压装置,驱动方向舵和倒航斗动作,达到控制整船运动的目的。
控制系统的核心功能分为3大部分:主站、左从站和右从站,站与站之间通过CAN总线进行数据冗余通讯。
主站装配在驾驶室控制台内,用于采集和处理来自操纵单元和控制单元的信号,控制台面上安装有方向舵和倒航斗指示仪表、主机转速指示表、报警指示、两只手柄、一只手轮、控制选择板、备用控制板、离合器控制板等。
左从站、右从站分别装配在左舷泵舱和右舷泵舱内,通过比例放大板的电流输出控制电磁阀,电磁阀打开液压装置驱动方向舵和倒航斗。方向舵和倒航斗的位置传感器可以实时将舵和斗的位置反馈到从站内。
故障自诊断数据检测器通过主站和整个系统相连,通过总线进行数据的传输和监测,可以对发生的故障进行实时报警,也可以对潜在的故障进行预警。
2 故障自诊断技术的应用
针对控制对象的特点,便于操作人员理解和应用,将故障类型分为两大部分,即系统报警和控制故障报警。
系统报警主要是指当系统出现安全隐患,但不影响系统对船的控制,还可以进行正常的船舶操纵,此时可以暂时不去处理,等船舶停止运行或靠岸时再处理。
控制故障报警是指系统出现失控,已经无法对控制对象进行操纵,必须查明原因并及时排除故障的情况。
故障自诊断检测器实时监测的重要报警点,如方向舵、倒航斗位置,手柄、手轮位置,总线传输等都远程传输到控制台上的报警板,当检测的报警点出现异常时,以指示灯发光,喇叭发声的方式提醒驾驶员。故障自诊断检测器将监测到的故障以故障码的形式存储在计算机的存储器中,维修查询时,以一定的方式读出故障代码,进行故障的后期处理。故障类型分类见图3。

图3 故障类型分类流程
2.1 总线网络的自诊断
总线自诊断功能不仅可以对接收的数据实时监测,也可以对自身的故障发出报警。
系统采用双冗余CAN网络,主要的网络节点有,主站、左从站、右从站、故障自诊断检测器等。主站负责对驾驶室控制台内的手轮和手柄等控制信号进行处理,从站负责对方向舵和倒航斗的控制电磁阀和反馈位置等进行处理,故障自诊断检测器主要负责故障信号的集中反馈和处理。主站将控制命令信号通过总线传到对应的从站,从站将反馈的位置信号通过总线传到主站,总线构建了数据传输的通道。
当双 CAN总线中有一路发生数据通讯故障时,故障自诊断检测器发出系统故障报警,另外一路正常工作的总线将承担数据传输的任务,不影响对船舶的控制。当双总线同时无法通讯时,故障自诊断检测器发出控制故障报警,此时主站和从站之间已经无法进行正常的数据通讯,控制命令无法通过总线传到从站,船舶将失去控制[3]。
2.2 手柄和手轮的故障自诊断
手轮和手柄位于驾驶室的控制台上,对方向舵的控制范围为左满舵到右满舵,手轮和手柄通过内部转化电路,可输出最大范围为0~10V的控制电压,主站内的AD数据采集模块到手柄和手轮的控制电压后,通过CPU(中央处理器)模块转换为对应的数字量,再通过总线将采集到的数据传输到从站,由从站内的驱动程序来完成控制命令。
将左满舵对应的电压值设定为2.5V,右满舵对应的电压设定为7.5V,当主站采集到2.5~7.5V之间的电压值时,认定为正常采集值。超出2.5~7.5V范围,但是还在0~10V内的电压值认定为危险值,发出系统报警,当数值在0~10V之外时,发出控制故障报警。
2.3 方向舵和倒航斗的反馈位置故障自诊断
当监测对象正常工作时,对应的传感器的输入和输出都有一定的工作范围。当传感器出现故障时,信号的电压范围超出正常范围或送入计算机不能识别的信号,且在一定时间内无法消失,计算机就判断传感器相应部位发生故障,将故障以代码的形式存入存储器中,同时发出声光报警。
方向舵和倒航斗的位置是重要的监测数据,其反馈数据是4~20mA电流模拟量。方向舵和倒航斗的位置反馈传感器位于泵舱内,通过从站内的AD数据采集模块进行数据采集,CAN通讯模块负责数据的传输,CPU模块进行数据的处理。系统配置见图4。

图4 方向舵和倒航斗系统配置
位置传感器的输出为4~20mA的电流值,数据从小到大,连续变化。在数据采集后,将6mA作为方向舵左满舵的设定值,17mA作为方向舵右满舵的设定值。6~17mA之间为正常范围。当数值在4~6mA和17~20.0mA之内时发出系统报警。从站通过CAN通讯模块将系统报警传输到故障自诊断检测器。
2.4 同侧泵防碰撞自诊断
双体高速艇的同一侧体安装了 2台喷水泵(内侧泵和外侧泵),彼此的安装位置比较接近,当外侧泵进行打右舵,内侧泵进行打左舵操作时,2台泵会互相靠近,超过一定范围会发生碰撞。为此设计了防碰撞自诊断功能。
根据同体的内侧泵同外侧泵发生碰撞的实际位置,测量出一个发生碰撞的危险范围,记录发生碰撞的临界值对应的两台泵的舵角反馈值。从站以临界值的大小为参考,实时监测反馈值的大小,当两个舵角进入该范围内时,及时发出报警信号,并锁定两台泵的方向舵,当恢复到正常范围的时候,才可以重新控制,实现了自诊断系统的提前预警功能,避免碰撞事故发生。
2.5 控制故障自诊断
正常的控制流程是:控制器件(手轮或手柄)发出控制指令,信号通过总线传到对应的从站,从站通过输出电流来控制喷水泵的液压系统的电磁阀来驱动方向舵和倒航斗的移动。整个控制流程采用闭环负反馈模式,使设定值和反馈值的差值在规定时间内,如果无法达到规定范围,则发出控制故障报警,并对液压电磁阀输出降为零,锁定出现控制故障的部位,防止出现误操作[4]。其原理见图5。
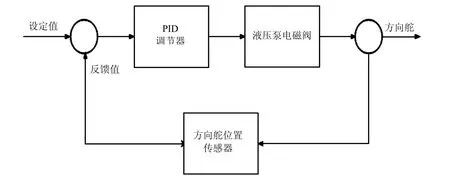
图5 控制故障自诊断
在控制面板上设置“重新连接”按钮,当控制故障排除后,“重新连接”按钮亮,这时按下按钮,系统复位,重启控制功能。
3 结 语
以双体喷水推进船为应用案例,阐述了喷水推进自动化监控系统故障自诊断的设计原理,通过不同类型故障的具体实施方法,最终设计并实现了一个可靠的故障自诊断系统。经过实船的长期运行,该系统可以及时检查出软件和硬件的故障,并反馈给操作人员,大大减少了维修,并缩短了维修时间,保障了船舶的安全运行,具有极高的使用价值。
[1] 徐筱欣. 船舶动力系统[M]. 上海:上海交通大学出版社,2007.
[2] 黄忠秀,等 船舶现代控制理论[M]. 北京:人民交通出版社,2001.
[3] 周德泽,等. 计算机智能检测控制系统的设计及应用[M]. 北京:清华大学出版社,2002.
[4] 王立祥. 喷水推进及喷水推进泵[J]. GM通用机械,2007, (10).
