静态施药模糊控制系统的研究与设计
2012-10-21方文杰张发军
方文杰 张发军
(三峡大学 机械与材料学院,湖北 宜昌 443002)
农作物病虫草害的防治是人类农业生产中最为普遍的一项农事活动,使用农药防治农作物病虫草害,其目的是要用最少量的农药取得最佳防治效果,并且不引起人畜中毒和环境污染等负面效应[1].
目前农村使用的施药机械基本都是20世纪60年代定型的产品,技术落后,制造工艺粗糙,而实际上,从施药器械喷洒出去的农药只有25%~50%能沉积在作物叶片上,不足l%的药剂能沉积在靶标害虫上,只有不足0.03%的药剂能起到杀虫作用[1-2].
精确施药技术是精确林业中一个重要的组成部分,其原理是根据不同施药对象及要求,通过计算机控制、机器视觉与图像信息处理等方面的技术手段对施药对象的位置、类别和数量等信息进行处理判断,自动完成对施药目标的跟踪、施药剂量与喷射压力等方面的调节操作,从而实现对目标对象的实时动态作业,以达到精准而又定量施药的目的,真正体现了“有的放矢”、“变量供给”的施药原则.精确施药技术的实施可有效避免传统粗放型农、林、牧等行业的防治消杀作业中造成的资源浪费,以及减少因采用盲目施药方法所带来的环境污染等问题[3-5].
本文利用模糊控制的方法,来研究与设计以“3WC-30-G车载式超低容量自动喷雾机”为载体的车载静态施药模糊控制系统,不仅为精确施药研究领域探索出一条新的理论方法,而且具有重要的现实应用意义.

图1 3WC-30-G型车载式超低容量喷雾机
1 静态施药模式施药控制原理
静态施药模式实际上是一种车载行驶速度为零的施药方式.其施药过程是通过选定好具体的施药对象后,车驶之跟前通过对靶喷头的自动跟踪运动来完成对施药对象不同部位的精确施药.
在此种模式施药过程中,对靶喷头的跟踪运动轨迹如图2所示.从图中可看出,对靶喷头先根据施药对象图幅轮廓信息空行程到施药最高起点位置,再根据实时获得的图像处理信息进行水平匀速直线施药,当喷雾到左右施药边缘时,对靶喷头会自动改变仰角而调节至下一施药轨迹,而后改变施药运动方向.在此边缘过程中,对靶喷头会根据实时获得的图像处理信息确定对靶喷头的拐弯过渡运动轨迹,之后便进行下一循环施药过程,直至施药到终点结束施药过程,喷头再空行程回到原点位置.此过程便完成了对一施药对象的施药全过程.

图2 车载静态施药模式喷头跟踪运动轨迹路线图
因此,在此种模式下的控制系统中,控制输入变量因素主要表现为实时获得的施药对象图像轮廓信息和对靶喷头与施药对象之间的距离大小,再者有控制药液开启信号的施药对象辨别信息;在控制输出方面主要为对喷头水平摆角与喷射压力的控制.
2 车载静态施药模式模糊控制系统设计
车载静态施药模式是在保持对靶喷头水平匀速直线运动状态的情况下,根据检测到的树冠轮廓冠幅宽度W与喷射距离D控制对靶喷头的水平摆幅A的变化,同时通过检测到的喷射距离D值与对图幅色度因子C值的识别判断,对喷射压力PL的大小与施药开启信号进行控制,建立车载静态施药模式模糊控制系统原理方框图如图3所示.
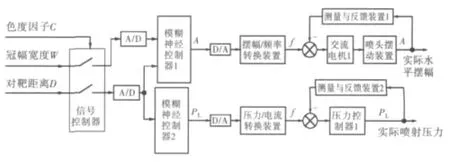
图3 车载静态施药模式模糊控制系统原理方框图
从原理框图中可以看出,3个控制输入信号先经过一信号控制器进行输入变量的前处理,此信号控制器的作用是根据输入变量色度因子C的具体取值(0或1),来控制确定另外两输入变量冠幅宽度W 和对靶距离D是否被导通输入模糊控制系统中.如果色度因子C的取值为零,则另外两输入变量冠幅宽度W 和对靶距离D的输入信号被断开;如果C的取值为1,则另外两输入变量W 和D 的输入信号被接通输入.模糊控制器1用来对喷头水平摆幅A的模糊控制进行模糊近似推理运算;模糊控制器2用来对喷射压力PL的模糊控制进行模糊近似推理运算.
2.1 控制变量的模糊化处理
根据实际的树冠轮廓特征分布信息,冠幅宽度W 的取值范围为:0.5~3m,在此控制系统的设计中,用以模糊控制设计的冠幅宽度输入值实际上为施药对象冠幅宽度反映在左边或右边的部分,故W 的论域为;同样,喷射距离D 的取值范围为:1~5m,则得其论域为.在控制输出因素方面,取喷头水平摆角A的取值范围为:-90°~90°,正负号反映的是喷头摆至左右位置的区分,故在模糊控制系统设计中取其论域为;喷射压力PL的取值范围为:3 000~4 000Pa,得其论域为
根据大量的实践经验,将各控制输入、输出变量的模糊子集描述如下.在控制输入变量方面有:①冠幅宽度W,将其描述为5个等级:WS(窄)、WM(较窄)、WZ(适中)、WG(较宽)、WB(宽);②喷射距离D,将其描述为5个等级:DS(近)、DM(较近)、DZ(适中)、DG(较远)、DB(远).
同样,对控制输出变量方面也有:①喷头水平摆角A,将其描述为5个等级:AS(小)、AM(较中)、AZ(适中)、AG(较大)、AB(大);②喷射压力PL,将其描述为5个等级:PLS(小)、PLM(较小)、PLZ(适中)、PLG(较大)、PLB(大).
鉴于高斯(Gauss)函数具有良好的平滑性,各个模糊子集在相应论域上的隶属函数均采用高斯函数分布,根据上述各控制输入输出变量模糊隶属函数的定义,对各控制输入、输出变量的隶属函数解析式分别如下所示.

2.2 模糊控制决策规则
车载静态施药模式模糊控制系统为一个三输入两输出的系统,通过分析各控制变量因素的相互关系,其中对靶喷头水平摆幅A的控制实际上只与树冠的冠幅宽度W 与喷射距离D两个输入变量因素有关,可以将其设计为一个两输入单输出的子控制系统;同样,喷射压力PL的大小也只与喷射距离D一个输入变量因素有关,亦可以将其设计为一个单输入单输出的子控制系统.总结本行业领域内的实践经验,同时根据其各自模糊子集的定义与隶属函数的确定,对于对靶喷头水平摆幅A建立如表1所示的模糊控制规则.

表1 喷头水平摆幅A模糊控制规则表
2.3 模糊近似推理
由表1所示的模糊控制规则可知,对靶喷头水平摆幅A模糊控制的完备模糊控制规则数有25条,根据每一条模糊控制规则都能给出一个模糊蕴涵关系Ri(i=1,2,…,25),则此模糊控制系统总的模糊蕴涵关系R是25个Ri的并,即有[6]


假设某一时刻控制系统的清晰输入量为:W=2,D=3,根据以上控制输入变量隶属函数的分布可知,清晰量W=2经模糊化后只映射到了模糊子集WM、WZ与WG上;同样,清晰量D=3经模糊化后也只映射到DM、DZ与DG上.由表1所示的对靶喷头水平摆幅A的模糊控制规则表可知,这样的控制输入量只能激活表1中括弧所示的9条模糊控制规则,根据Mamdani模糊蕴涵关系算法进行近似推理计算出相应的系统控制输出模糊量Ui(a),有:
1)对于控制规则“if W is WM and D is DM then A is AZ”,可得系统的控制输出U1(a)有:

(0.22AZ)(a)为0.22与模糊子集 AZ(a)的数集,故(0.22AZ)(a)也为一模糊子集,其分布如图4所示.
2)对于控制规则“if W is WZ and D is DM then

图4 模糊控制规则(1)近似推理输出结果分布
A is AG”,可得系统的控制输出U4(a)有:
则(0.22AG)(a)的模糊子集分布如图5所示.

图5 模糊控制规则(4)近似推理输出结果分布
3)对于控制规则“if W is WG and D is DM then A is AG”,可得系统的控制输出U7(a)有:

模糊控制规则(7)近似推理输出结果分布同图5所示,其余各模糊控制规则对应的控制输出均为零.于是,最后总输出的模糊子集分别为这9个输出模糊子集的并,则有:U(a)=(a)=(0.22AZ)(a)∪0∪0∪(0.22AG)(a)∪0∪0∪(0.22AG)(a)∪0∪0=(0.22AZ)(a)∪(0.22AG)(a),则总近似推理输出量的模糊子集为(0.22AZ)(a)与(0.22AG)(a)组成的分布,如图6所示.

图6 经过近似推理后输出量的模糊分布
2.4 解模糊
经过近似推理后的控制输出量仍然是模糊变量,解模糊化的方法,如前面所述的有很多种,这里选用了应用比较广泛的面积重心法对近似推理输出进行清晰化处理[6].
如图6所示,U(a)不是连续的函数,这就要求对U(a)的曲线各部分进行分段处理,取U(a)总的自变量a的变化范围为,则可将其分为3段的自变量区间分别为:与,相应的a1与a2可通过如下方法求得.

则根据面积重心法的计算公式,有


3 车载静态施药模式模糊控制系统仿真
利用Matlab里的模糊控制仿真模块分别设计出相应的模糊推理控制器,再根据静态施药模式模糊控制系统的原理框图,建立模糊控制系统的仿真图如图7所示.为了便于在对比示波器中能同时很好地观察到控制输出变量与控制输出变量之间的关系,在仿真图的设计时,有意地把输入变量在导入对比示波器之前进行了相应幅值的放大与上下方位的移动.同时,为了观察控制输入变量动态变化的特点,在模拟控制输入变量信号时,均采用了一常数值与一信号发生器相合成的方式,在信号发生器里可以取不同的信号变化来动态地模拟控制输入变量的变化.

图7 静态施药模式模糊控制系统仿真图
经过仿真,可得对靶喷头水平摆幅A的模糊控制推理输入、输出量关系曲面图与模糊控制系统仿真图,分别如图8与图9所示.


从控制输入与输出量曲面关系图可看出,控制输出变量随各控制输入变量的改变而变化连续且平滑,输入与输出量之间的对应关系也很合理.从模糊控制系统仿真输出结果可以看出,各模糊控制响应速度快,控制输出几乎无滞后,控制效果也很稳定,基本无振荡与超调的现象.
当取树冠宽度W 的值为2,且对靶距离D的值为3时,经过模糊控制系统推理运算后,可得对靶喷头水平摆幅A的值为34.6,如图10所示,这与前面式(2)计算理论计算出来的结果基本相近.

图10 静态施药模式水平摆幅A模糊推理状态图
4 结 语
本文以“3WC-30-G车载式超低容量自动喷雾机”为研究载体,具体分析了其静态施药控制原理,再根据模糊控制的理论知识,结合实践的知识经验,对其各控制变量进行模糊化处理与模糊控制规则确立,建立其静态施药模式模糊控制系统原理框图,经过理论计算与软件仿真实验表明:基于模糊控制方法的静态施药模式模糊控制系统响应速度快,几乎无滞后,控制结果也很理想,控制效果很稳定,基本无振荡与超调的现象.
[1] 孙文峰,王立君,陈宝昌,等.农药喷施技术国内外研究现状及发展[J].农机化研究,2009(9):225-228.
[2] 赵今凯.我国植保机械的应用现状及发展建议[J].农业技术与装备,2011(1):32-33.
[3] 徐映明.农药施用技术[M].北京:化学工业出版社,1999:23-25.
[4] 袁会珠.农药使用技术指南[M].北京:化学工业出版社,2004:78-80.
[5] 张发军.车载喷雾机及精确施药关键技术研究[D].武汉:武汉理工大学,2008.
[6] 石辛民,郝整清.模糊控制及其 MATLAB仿真[M].北京:清华大学出版社,2010:47-49.
