基于Pisarenko 谱估计的GPS 多普勒频偏快速捕获
2012-08-29杨晓波
杨晓波
(石家庄职业技术学院电子工程系 河北 石家庄 050081)
0 引言
提高GPS 接收机多普勒频移的捕获时间指标具有重要的实际意义[1].GPS 接收机伪码的捕获是载波多普勒和码相位的二维搜索,如图1 所示.
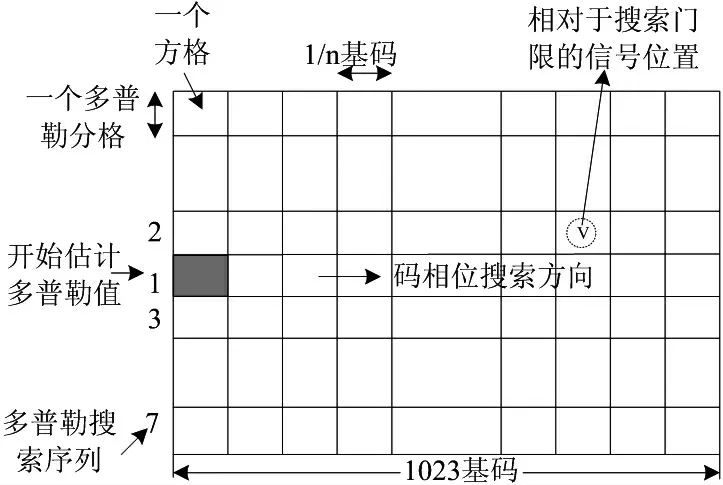
图1 伪码相位和载波多普勒二维搜索
多普勒搜索步长一般取2/3T[2],T 为积分时间,所以一般多普勒频偏得估计精度为几百赫兹, 这对于PLL 来讲过于粗糙,并且PLL 对动态非常敏感,所以一般接收机先由FLL 将多普勒频差估计到一个比较小的范围, 然后再切换到PLL 进入跟踪状态, 这样就在多普勒的捕获时间中增加了FLL 的收敛时间,同时捕获虚警后的滞留时间也会加大,对此文献[3]提出对解扩后的信号利用FFT 来估计载波多普勒,由于FFT 频率分辨率受到信号长度的限制,该方法也不能取得很好的效果.例如, 在5MHz 的采样率下要达到100Hz 的分辨率就需要10ms 数据,50000 个采样点,这样不但增加了捕获时间同时还增大了计算量和存储空间.文献[4]提出了将多普勒搜索单元设窄一些,如250Hz、125Hz 提高多普勒频率估计的分辨率.但该方法会加大搜索空间,非常耗时.本文在研究解扩后GPS 信号特点的基础上提出利用Pisarenko 谱估计的方法利用很少的数据来精确估计多普勒以减少载波多普勒的平均捕获时间.
1 FFT 快速捕获原理与多普勒平均捕获时间
1.1 多普勒FFT 快速捕获原理
图1 为PN 码FFT 快捕的中频数字化结构, 由数字下变频、FFT 相关、检测判决、解调、FLL 环路、符号时钟恢复与保护等几部分组成. 其中FLL 环路的工作流程是从接收数据流中提取频偏估计值, 经环路滤波后去控制本地NCO 的频率,使其跟踪输入中频信号的频率变化, 从而使下变频的输出始终为零中频数字基带信号.
接收机接收到的信号模型为:

其中M:可见卫星个数;Di:电文;Pi:伪随机码;ωi:GPS 信号载波频率加多普勒频率;τi:信号延迟;φi:载波初始相位;n(t):双边功率谱密度为N0/2 加性高斯白噪声.

图2 多普勒频偏FFT 快捕的中频数字化结构
FFT 相关器同相、正交输出:

其中,ε 为接收的伪随机码与本地伪随机码未完全对齐的基码数,ωd为载波的多普勒频移,T 为相关积分时间,φ 为相位差,nI和nQ是相互独立的基带高斯白噪声,相关输出后计算同相、正交包络:

一个频点上包络的最大值与恒虚警门限比较如果包络大于门限,认为捕获成功,在没有信号时,包络是服从瑞利分布的随机过程[2],经本文研究FFT 快捕恒虚警门限为:

其中,n 为FFT 点数,σ 为1-sigma 噪声功率, 但对于多普勒来讲这只是实现了粗捕, 然后将粗捕后的多普勒传递给FLL, 经过一定时间后环路锁定则系统转入频率跟踪状态,即捕获成功,否则将重新回到粗略估计状态.
1.2 多普勒频偏平均捕获时间
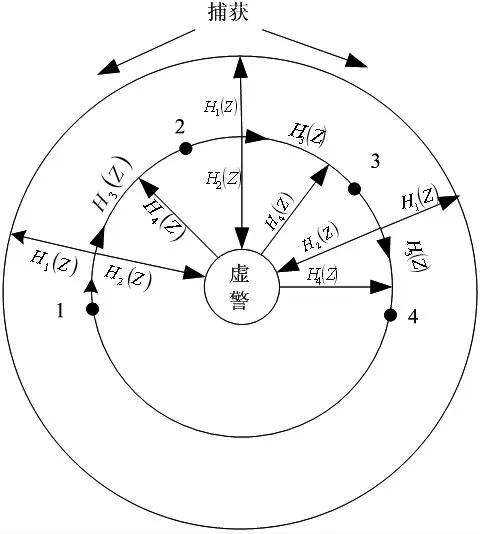
图3 多普勒频偏捕获状态转移图
根据以上分析可知,多普勒频移捕获算法分为两个步骤:粗略估计和捕获验证.首先,把接收机的频域搜索范围划分为若干相等的频率区间,各区间的中心频率点设为fn.粗略估计就是对频点fn上的最大相关值与门限比较, 如果大于门限则将NCO 固定在此频率点上.系统随即进入捕获验证状态,FLL环路对残留频偏进行捕获,若经过时间Ts(FLL 收敛时间)后环路锁定(残留频偏小于某个规定值),则系统转入频率跟踪状态(即捕获成功),否则将重新回到粗略估计状态.
所以多普勒频移的捕获过程具有马尔科夫性, 图3 中状态n(1,2,3,…)对应系统的粗略估计状态,另外两种情况分别是捕获状态和虚警状态,捕获状态是马尔科夫过程的稳态,设系统初始时刻处于状态1, 经FFT 快捕后判断进入其它状态的转移路径:a.进入捕获状态;b.进入状态2,即系统没有满足判决条件仍处于粗捕状态;c.进入虚警状态,经验证后再回到粗捕状态如此循环,直到系统进入捕获状态,该过程转移图中各支路的增益表达式:

其中G 是频率单元数,Tc是一个频点的驻留时间,Ts是虚警滞留时间,于是得到多普勒平均捕获时间的生成函数:

式中PD,PFA,PM分别表示多普勒频移捕获的检测概率、虚警概率和漏检概率,由于PD+PFA+PM=1,H1(1)=PD,H2(1)=PFA,H3(1)=PM,H4(1)=1 平均捕获时间计算得:

其中G 为频点的个数,Ts是虚警滞留时间,也是多普勒虚警验证时间,对于有FLL 辅助的环路,就是FLL 的收敛时间,如果能够将这个时间缩短,将缩短多普勒的平均捕获时间.
2 Pisarenko 估计多普勒频偏具体算法
由式(1)如果第j 个信号被捕获,则解扩后的信号模型为:
dsj(t)=Dj(t-τj)sin(ωjt+φj)

式(9)等号右边第二项中Rij为第j 个伪随机码和第i 个伪随机码的互相关, 研究表明互相关部分最大可能功率为-21dB[5],第三项为伪随机码和加性白噪声的相关.这两部分可以看作高斯白噪声, 第一项为载波部分, 其中载波相位φj是[-π,π ]之间均匀分布的随机数.所以,解扩后的信号可以认为是平稳谐波过程与高斯白噪声的和,这样的观测信号,可以利用Pisarenko 谱估计对载波的多普勒频率进行高分辨率的估计[6]. Pisarenko 谱估计由于使用了奇异值分解和总体最小二乘方法,整个计算具有好的数值稳定性,而且AR 阶数和参数估计具有非常高的精确度[7].所以本文采用这种方法估计载波多普勒.
当谐波信号在加性白噪声中被观测时, 它的AR 参数和MA 参数完全相同一个特殊的随机过程, 这一特殊的ARMA过程所服从的法方程为:

与修正的Yule-Walker 方程类似, 该方程可以构造超定的方程组,并使用SVD-TLS[6]算法求解.
具体算法:
步骤1 利用观测数据的样本自相关函数估计Rˆy(k)构造法方程的扩展阶自相关矩阵
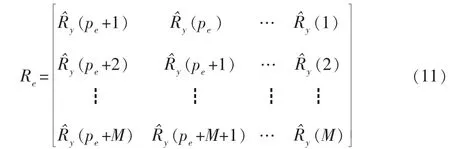
式中pe>2p,并且M>p;
步骤2 将矩阵Re当作增广矩阵,利用算法SVD-TLS 确定AR 的阶数2p 和系数向量a 的总体最小二乘估计;
步骤3 计算特征多项式

步骤4 利用

计算载波的频率.
3 计算机仿真及分析
3.1 载波多普勒估计精度
载波频率为1.25MHz,多普勒频率设为300Hz,采样频率5MHz,若多普勒搜索步长为500Hz 则粗捕后多普勒最大误差250Hz,通过一个以捕获频率为中心频率带宽1K 的带通滤波器,此时扩频增益为33dB,考虑实际的较弱GPS 信号信噪比-20dB,解扩后信噪比为13dB,仿真利用1ms 数据.
由于估计的谐波频率只有1 个,所以式(10)中p=1,取M=12,pe=10,当然也可以取其它值,只要满足扩展阶自相关矩阵的要求即可.图5 为信噪比13dB 时20 次仿真的谱估计图,图中实线为估计谐波功率谱密度,虚线所示为真实频率,可以看出每次的估计结果非常稳定.
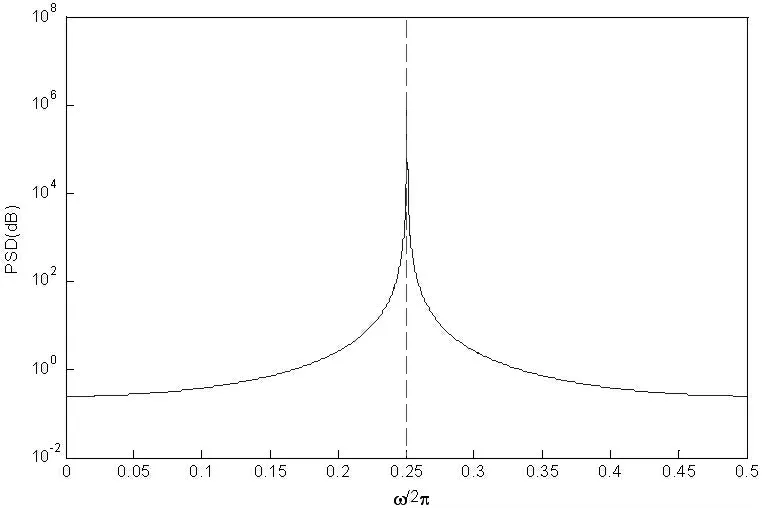
图4 本文方法估计载波多普勒
同时本文应用三级最小二乘ARMA 参数模型法和FFT估计载波多普勒, 数据长度1ms, 其它条件相同, 下表是Pisarenko、ARMA 参数模型法及FFT 三种估计方法的对比,表1 为仿真进行50 次的频率均方误差(RMS),由于FFT 的频率分辨率对于1ms 的数据长度为1kHz, 其输出频率为1kHz 的整数倍,所以其误差不随信噪比变化.

表1 1ms 数据频率估计RMS(Hz)
考虑伪码未对齐情况. 码片误差最差情况0.5 个码片,如图5 所示,图中实线表示本地码和接收信号伪码对其情况,虚线为差0.5 码片的相关输出,输出功率降低6dB,所以会造成估计精度降低.表2 为仿真进行50 次的频率均方误差(RMS).
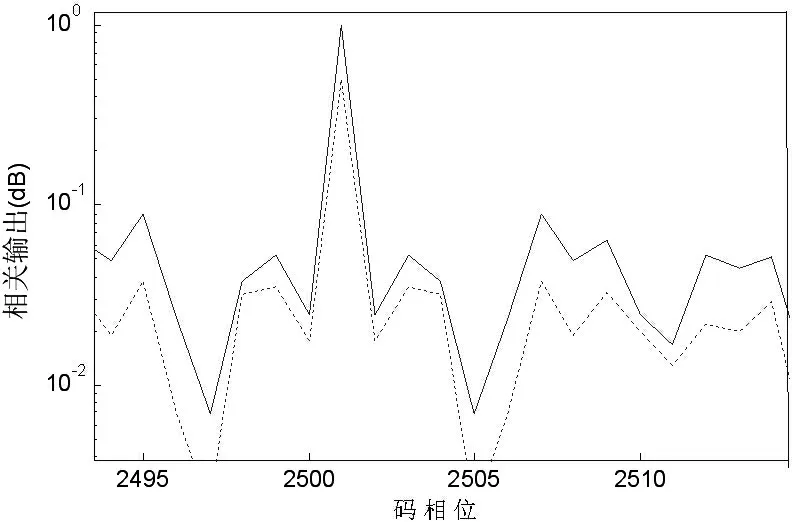
图5 本地码和接收码未对齐对相关输出峰值功率的影响
从表1, 表2 可以看出Pisarenko 的多普勒估计精度比ARMA 及FFT 高,虽然其估计误差受信噪比的影响,但是在考虑低信噪比GPS 信号情况下,其估计误差完全能够满足实际情况.

表2 1ms 数据考虑码片未对齐情况频率估计RMS(Hz)
3.2 运算量的研究及对平均多普勒捕获时间的对比
仿真条件: 估计的多普勒范围为±10kHz, 多普勒步长500Hz,多普勒粗捕误差250 为Hz,则频率单元为21 个,积分时间为1ms,在MATLAB 仿真环境下,进行100 次仿真,FLL 平均需50ms 达到稳定(频率误差达到20Hz 内),每次需要40 e6次浮点运算, 而本文采用的频谱估计方法要20 e6 次浮点运算,是FLL 收敛时间的一半.
由式(8),若Gc=21,PFA=0.01,PD=0.95,Tc=0.001 情况下,若Ts=0.05 得平均捕获时间0.0616s, 若Ts=0.025 得平均捕获时间0.0363s,可以减少42%的时间,可见,采用高分辨率的载波多普勒估计替代FLL 对多普勒剩余残差估计可以大大减少从捕获到跟踪的时间.
4 结论
以上研究表明,对于解扩后的GPS 信号,视为平稳随机过程和高斯白噪声的和, 通过谐波恢复Pisarenko 谱估计法,对GPS 多普勒进行高分辨率估计是完全可行的, 可以取得非常好的的精度,以及稳定的结果,而且计算量也相对FLL 对多普勒剩余残差估计小得多,可以减少40%左右的GPS 接收机从捕获到跟踪的时间。S
[1]黄振,陆建华,杨士中.卫星通信中多普勒频移的快速捕获[J].电子学报,2003,31(7)1052-1056.
[2]Kaplan,E.,Understanding GPS:Principles and Applications,Artech House,1996.
[3]Tsui,J.,Fundamentals of Global Positioning System Receivers: A Software Approach, Wiley Inter-Science,2000.
[4]Lin,D.,Tsui,J.,”Comparison of Acquisition Methods for Software GPS Receiver”. Proceedings of ION, pp.2385-2391, September 2000.
[5]Parkinson,B., et al.(editors),Global Positioning System. Volume 1.American Institute of Astronautics and Aeronautics, 1996.
[6]张贤达.现代信号处理[M].2 版.北京:清华大学出版社,2003.
[7]Zhang X D .Estimation of frequencies of sinusoids in colored ARMA noise via singular value decomposition.Proc.IEEE ISCAS’89,Portland,OH.1989:1315-1318.
