Q02 PLC控制伺服电动机系统在机床转台上的应用
2012-07-21邹波
邹波
(1.成都重型轴承研究所,成都 610031;2.成都科华重型轴承有限公司,成都 610300)
为了提高机床设备精度和实现自动化控制,PLC和伺服系统被广泛运用于各种数控机床和转台等设备中,以实现精确的位置和速度控制。其中位置控制的精度主要取决于伺服控制器及运动控制器的精度。下文通过一个高精度定位加工用转台的设计,讨论了采用PLC和伺服系统对转台进行精确的旋转控制,以及对传动杆的直线运动进行精确控制的方法,同时,考虑到传动中的累积误差,采用周期的位置检查进行调整。如何采用PLC进行精确的位置控制并让两轴协调运作是控制系统的关键。
1 控制系统及原理
高精度定位加工用凸轮分度转台结构如图1所示。控制系统通过定位模块实现对两轴的控制。根据运行的要求,基本控制模式为:由伺服电动机通过变速机构带动凸轮旋转,凸轮每旋转一周带动转台旋转90°,到达指定位置后凸轮停止动作,此时,上方传动杆落至指定位置后对工件进行加工,加工完成后传动杆上升至原位,凸轮继续转动并带动转台旋转至下一加工位置。
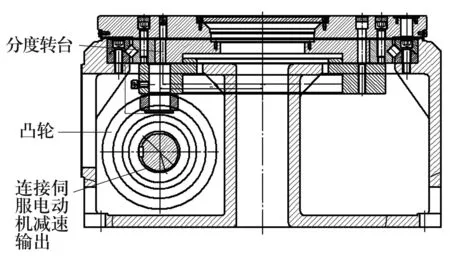
图1 高精度定位加工用凸轮分度转台结构简图
从运动时序看,由于系统采用凸轮旋转带动转台,同时与上方传动杆交替运动的方式,因此,控制系统设计由1个PLC及定位模块和2个伺服控制模块组成。控制原理为:由PLC控制定位模块输出,由QD70P4采用脉冲和方向控制的方式,通过2个伺服控制器分别驱动伺服电动机;两个运动系统的配合动作、协调工作由PLC完成。
为实现精确的位置控制,差错控制方面通过检测伺服驱动器上差分输出的方式实现半闭环控制;同时考虑到系统保护,在固定的周期通过凸轮上的感应开关检验是否超过行程,形成转台运动的再次校验;传动杆的运动则通过限位开关形成再次的校验系统。控制系统流程如图2所示。
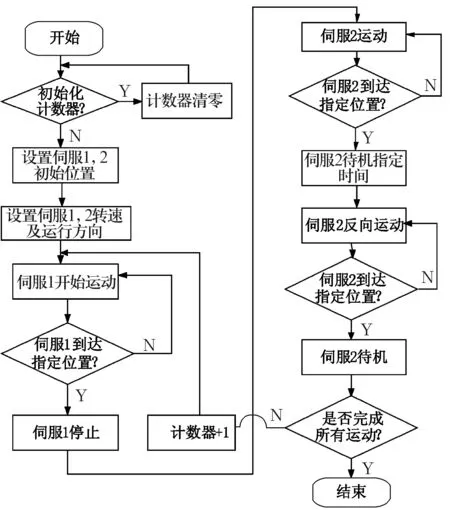
图2 控制系统流程图
2 控制系统硬件构成
控制系统硬件构成如图3所示。该系统采用高速脉冲控制,上位机采用三菱PLC Q02,并用RS232与计算机系统连接;采用QD70P4定位模块进行位置控制,该模块在多轴系统中可以进行4轴控制输出,并实现位置及速度控制,实际采用了2轴控制输出的方式,分别控制凸轮和传动杆;伺服控制器采用MR-J2S,可以使用脉冲加方向的输入方式及RS232和RS422的通信方式。

图3 控制系统硬件组成
由于定位模块QD70P4采用开环脉冲输出(4轴开路集电极输出型),无法对系统中的伺服电动机和伺服控制器进行监控,故使用PLC检测伺服控制的差分输出信号,并用软件进行设置,实现对位置的闭环控制。因为设备的传动系统较为复杂,为提供系统保护,采用周期性的外部检测方式,并传递给PLC校正。
3 程序设计
由于采用脉冲控制伺服驱动器,电动机行程所需的脉冲数为:一次移动所需脉冲数n=指定距离×电动机旋转一周所需脉冲数÷电动机旋转一周时负载移动量。
设计中使用了实用程序包GX Configurator-PT1,对要运行QD70的轴逐个进行初始化设置。QD70实用程序包GX Configurator-PT为无需考虑I/O信号和缓冲存储器即可使用专用屏幕进行QD70的初始化设置、自动刷新设置监视和其他功能的专用软件,作为开发的内置软件,该程序包需要和GX Developer同时使用。
控制伺服电动机位置控制程序如下:
LD X0
OUT Y0
ANI M8
DMOVP K6000 U0G804;6 000
脉冲/秒
MOVP K1500 U0G802;ACC/DCE
1 500 ms
MOVP K1500 U0G803
DMOVP K25000 U0G806;设置单向
行程
LD X0
ANDP M9
MOVP K3 U0G801;设置正向
速度位置控制
SET M8
MOVP K1 U0G800;设置连续定位
控制
在质量合格的产品进入加工环节后,汪记在产品的每个阶段也都制定着严谨的工艺及操作规程,各个环节严格按照要求组织生产。生产过程中,设立质检监督岗位,对生产各环节的操作进行抽查验证,同时在生产现场各个工序环节安装视频监控系统,实时监控厂区生产操作,实现关键环节监控全覆盖、无盲区。
LD X0
ANI X8
ANDP M19
MOVP K4 U0G801;设置反向
速度位置控制(轴1不需要反向运行)
SET M8
MOVP K1 U0G800;设置连续
定位控制
LD X0
ANDP X18;检测行程是否完成
RST M8
MOVP K0 U0G800;设置定位终止
LD M8
ANI X1;轴1出错警报
ANI X18
OUT Y8;设置轴1的启动信号
END
上段程序中通过地址801设置进行正反控制,通过X1对轴进行监视;速度控制用804进行设置;行程完成后检测X18,使轴1停止;在设置完成后,使启动信号Y8变成ON以从QD70把脉冲输出到驱动装置。
此处两轴交替运行,通过设置M9和M19来切换运行。从时序上可知,轴2在轴1停止之后启动,而轴2停止后轴1再进行下一段运行,对于需要两轴同时运行的场合,可以先设置好运行参数,再同时启动Y8和Y9。
4 结束语
采用PLC高速脉冲控制伺服驱动的方式简单,硬件成本较低,系统采用的结构和控制方法,可广泛应用于转台及直线运动的精确位置控制和速度控制,或需要进行各运动系统协调运作的情况,该控制方式可做为类似系统控制方法的参考。