交通监控系统中帧差法与背景差分法优劣分析
2012-06-23尚绪凤朱赵龙张贺泉
孙 欢,尚绪凤,朱赵龙,张贺泉
(中国计量学院理学院,浙江 杭州 310018)
新型监控系统可以通过区分监控对象的特征,主动收集数据、分析数据,并根据预设条件执行报警、记录、分析等动作。实时地交通流量信息反馈,可以为道路拥塞高峰时期或紧急交通事故发生时的道路智能化调度管理提供依据,从而减少道路拥塞,提高路面资源的利用率,最合理地利用现有的交通网络。现就其中最简单的车流量统计进行分析。图像处理的过程分为图像的预处理、背景的提取、检测线的选取、结果分析[1-4]。文献[5]利用Canny边缘帧差法进行公交客流量统计。文中以杭州某地区内的车流量为例进行分析。
1 帧差法和背景差分法优劣性分析
1.1 图像的预处理
先将视频变为以一帧为间隔的图片,具体方法如下:先读入视频,获得总帧数并依次读取。
之后进行灰度处理,得到预处理的值。然后将其进行边缘检测,如图1所示。
图1 进行边缘检测后的图像
1.2 帧差法和背景差分法分析
1.2.1 帧差法和背景差分法理论比较
图像提取的背景方法一般用于视频车辆检测技术。而相关视频车辆检测技术的方法如图2所示。
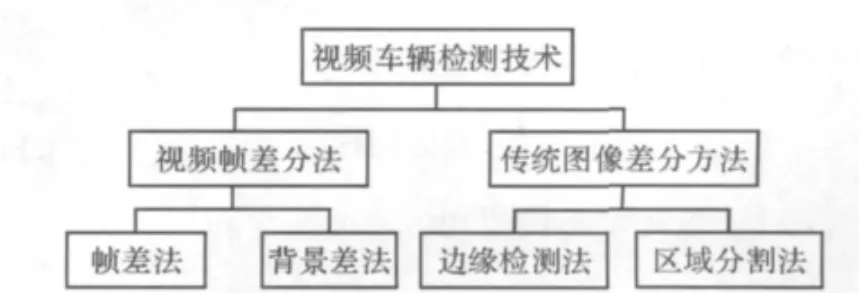
图2 视频车辆检测技术分类
(1)帧差法的优点是计算简单且不易受环境光线变化的影响,但它不能检测静止车辆,且处理效果依赖于图像采样频率以及被检测车辆的车速。
如果运动速度较快,而选取的时间间隔过大,就会造成两帧之间无覆盖区域,从而无法检测到运动物体;如果运动速度过慢,而选取的时间过小,则造成过度覆盖,最坏的情况是物体几乎完全重叠。
(2)背景差法分简单差分和实时差分两种。其中实时差分应用较广,它可以根据环境的变化进行背景的变换。但要求设定阈值,且更新背景的方法也较繁杂。此方法适用于环境光照、阴影、风等自然因素变化较敏感的情况。设定阈值的方法较为复杂。而简单差分适用于背景基本不变的情况。
1.2.2 帧差法和背景差分法应用比较
(1)帧差法。先将视频转化成的图像数据化,再进行灰度处理,将视频序列中每两帧连续图像逐像素相减,以去除基本不动的物体及背景。此时的情况与理想情况下相似,因此差分后图像的非零部分表明对应像素发生了移动,由此可以将图像中运动的车辆目标突显出来。
另外,由于运动的车辆目标相对于路面平动而且方向与图像平面平行,因而形成了简单的二维平移运动。图像帧之间的间隔非常短(0.04 s),可以认为车辆的各部分在图像平面上的灰度基本保持不变。
将得到的差值矩阵进行二值差分处理,可以使得到的结果更准确

其中,T为阈值。
(2)阈值的选取。由于阈值选取相对繁琐,所以选取其中一个较为简单的方法进行计算,方法如下:均值比例阈值法是一种基于经验估计的阈值分割算法。设原始图像的灰度级为L;灰度为i的像素点数为pi;图像的全部像素数为N;那么图像阈值计算过程如下:
(1)计算图像的直方图统计结果,得到灰度值为k的频率朋PHS(k)为

(2)计算图像的灰度均值

(3)计算灰度类均值和类直方图之和
(4)计算分离指标

(5)求出使之达到最大的值s,则最佳阈值T=s,所以阈值为使得δB(k)最大的点的频率朋对输入图像二值化处理

其中,T为阈值。
在实际场景中,每一帧的情况都不是人为所能够预料的,所以一个固定的阈值不能解决变化中的实际问题。而上述方法能够较好地解决这一问题。图3为每帧间差分后的示意图。
图3 相邻两帧差分图像效果示意图
(3)简单边缘检测法。将得到的背景分别与每组连续图像差分,以得到去掉背景的目的,灰度化后差分得到的非零数值基本都是由于汽车移动引起的。
要做的背景差法是得到一个统一的背景,将当前待检测的视频帧和该背景进行逐像素相减作差分,差值图像中非零的像素点表示了运动物体,由此可以实现运动车辆的较准确提取。即计算

其中,T为阈值。用此来判断得出每组背景的矩阵。
采用阈值进行目标分割的目的是把运动车辆和微小变化的背景分开。阈值分全局阈值和局部阈值两种,前者只用一个阈值对整个图像进行二值化,后者先将一帧图像划分为若干个子图像,对每个子图像再确定相应的阈值。现实中需要根据序列图像的背景复杂度进行选择。在此部分研究的车辆运动的背景相对单一,所以使用全局阈值。
要得到背景,考虑到整个过程中背景变化不大,所以将得到的所有图像的矩阵相加求均值得到其背景。
用均值法进行背景的计算:均值法,即在一段图像序列中,取它们的平均值作为背景图像即

其中,Backgroud(x,y)表示背景;image(x,y)表示每一帧的图像。该算法简单,计算方便。

图4 整个过程中的背景图
从图5中可以看出有两处亮点,分别是由时间变化和汽车位移变化引起的。时间变化不会引起后面车流量计算的误差,所以此处亮点影响不大。通过对图像的观察发现背景变化较小。
2 车辆跟踪及车流量问题
2.1 检测线的选取
要进行车流量的检测,检测线的选取至关重要,它关系到预测的车流量与实际车流量之间是否会出现误差,是否会出现对同一车次多次计算的可能。
选取检测线原理:先固定一条线,此线必须和4个车道都全面接触,且与水平面平行最好,将此直线分别代入由前面进行差分的点构成的图形,检验是否有点在其直线上,若有点,则记为加1次,若无,则进行下一个图形的判断。直到所有图都运行结束,得到的数即为车流量。
采用差分的方法得到检测线。以下为用差分法求检测线的步骤:
(1)选取视频序列里任意一个图片如图7(a)所示,将其放入画图工具栏里。
(2)在图上做出一条与水平面平行的直线,且与4个车道完全接触,如图7(b)所示。
(3)将图7(a)与图7(b)进行差分,得到的矩阵即为检验线矩阵。
(4)将检验线矩阵中的非零部分提取出来,得到检验线。
如图7所示,将4通道“简化”为单通道,通过人工标记检测线,在Matlab中导入标记图片和未标记图片,然后对两者做差分求取其差分矩阵,从而可以得到检测线在288×352矩阵中的位置为第217行,第60列到352列的区域中。

图7 检测线的选取示意图
3 结束语
表1为在各个时段下,应用背景差分和帧差法得到的预测车流量与真实车量的对比。
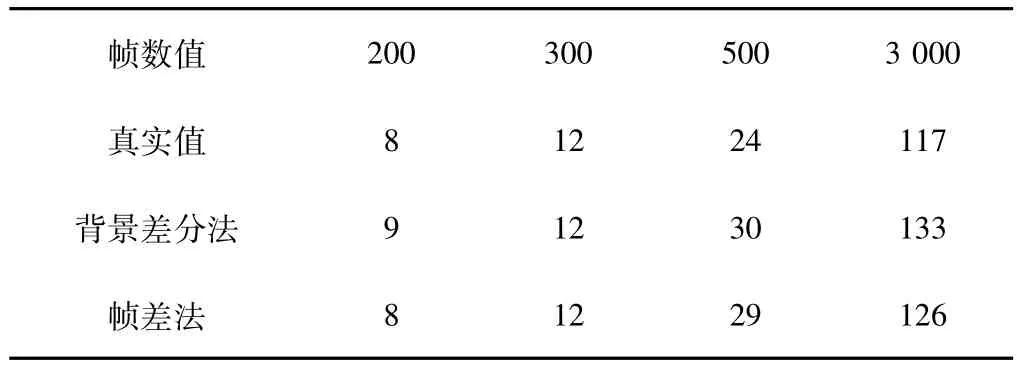
表1 各帧值下两种方法的车流量预测与真实值对比
经过对比,可以发现帧差法比背景差分法准确度高。这是因为帧差法为相邻点间的视频序列的差值,比背景差分法中任意时间序列与背景差值更精确。
因此,得出结论,在一般情况下,帧差法在处理交通检测问题上更加准确。
[1]丁一,毛征,余欢.基于对比度的目标跟踪系统及算法研究[J].中国科技论文在线,2005(6):323-329.
[2]王卫峰,王昆,郝志峰.基于视频的车流量统计算法计算[J].科学技术与工程,2011,11(17):4080 -4082.
[3]张永丽,张太镒,毕建民.基于自适应背景初始化的车流量检测算法[J].微电子学与计算机,2007,24(5):138-140.
[4]马晓宇.基于视频分割与跟踪算法的车流量统计[D].杭州:浙江大学,2008.
[5]田牛,应捷.基于Canny边缘帧差法的公交客流量统计[J].微计算机信息,2010(32):196 -198.
[6]武智霞,王化,王沛.基于H.264压缩域的运动目标检测算法[J].电子科技,2010,23(7):8 -10.
