门式起重机有效悬臂静挠度的检测分析
2012-06-20唐炜祺上海铁路局科研所
唐炜祺 上海铁路局科研所
1 引言
对门式起重机有效悬臂静刚度的测定,目前许多检测部门采用的方法是在有效悬臂处定出测量基准点,用经纬仪或水准仪定出标高,然后将小车或电动葫芦运行至有效悬臂处,起吊额定起重量,此时观察测量基准点的标高差,这个差值就被定为是主梁在有效悬臂处的处置静挠度。从表面来看,这种测定方法没什么问题,但从理论上分析和在安庆北站20 t/10 tU型门式起重机的实测操作来分析,发现该方法存在欠妥之处。
2 静挠度
弯曲变形时横截面形心沿与轴线垂直方向的线位移称为挠度,用y表示。简言之就是指梁、桁架等受弯构件在荷载作用下的最大变形,通常指竖向方向y轴的,即构件的竖向变形。而静挠度即指在静力载荷下的挠度,也就是不随时间发生变化的载荷下产生的挠度。
3 关于门式起重机有效悬臂静挠度的相关规定
为了检测起重机的静态刚性,在GB/T3811-2008《起重机设计规范》中规定“自行式小车(或电动葫芦)位于桥架主梁有效悬臂长度时,由额定起升载荷及小车(或电动葫芦)自重载荷在该处产生的静挠度f1与有效悬臂长度L1的关系,推荐为f1≤L1/350。 ”
在JB/ZQ8002-89《通用门式起重机产品质量分等》的考核项目及指标中,跨度中点下挠度 A3~A6 级≤S/800,A7、A8级≤S/1000,S为起重机跨度。有效悬臂处下挠度≤L1( 或L2)/350,L1、L2为左右端有效悬臂长度。
4 关于安庆北站20 t/10 tU型门式起重机静刚度检测分析
4.1 当地安全检测机构的第一次静刚度检测及结论
安庆北站20 t/10 tU型门式起重机跨度S=22 m,有效悬臂长Lc=6 m,工作级别为A5级,安装完毕后,按照规定先由当地安全检测机构进行检测。他们按照本文引言中提到的常规测量方法,测得主梁有效悬臂处的垂直变位为20mm,并依据标准中的规定,主梁有效悬臂处的垂直静挠度应≤Lc/350=6000/350=17.1mm,因此判定该起重机的主梁质量为不合格产品。
4.2 复检时的静挠度检测及数据分析
在当地安全检测机构的参与和使用单位有关人员的监督下,我们使用同样的测量方法对该机主梁的静态刚性进行了复检。为了全面观察起重机主梁的变形,在起重机主梁上布置了如图1所示的A、B、C三个测点(A为有效悬臂处、B、C为主梁的支腿连接处)。在A点加载额定载荷后,测得的结果为:C点上移1 mm,B点下移 7 mm,A点下移 20 mm( 见图 2)。

图2
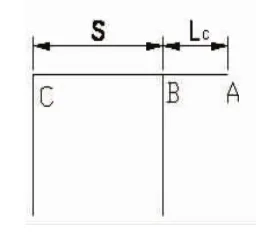
图1
通过分析测得的结果,我们认为:C点上移1 mm是因为A点加载后受杠杆作用的影响C点会减载,而C点减载是由于大车轨道下弹性垫板及支腿的弹性变形所至;B点下移7 mm是因为A点加载后,B点相应地增加了下压力,由此产生了B点所在位置支腿的垂直变形及大车轨道下弹性垫板的压缩变形,加载变形后的主梁如图2中A,B,C,的连线。从上图可以看出,假定主梁AC是个刚体,由于B、C两支座的位移,则应引起A点位移到A″处,从而可以看出A′A″才是该有效悬臂真正的静挠度。设AA″=△,因为 C′EB′和 C′DA″是两个相似三角形,可以成立等式:

所以△=9.2( mm)

这样A点的垂直静挠度(即主梁在有效悬臂处的垂直静挠度)应为10.8mm小于Lc/350=6000/350=17.1 mm,因此认为该起重机的静态刚性是符合相关规定的。对此复检结果,当地安全检测部门和使用单位均没有提出异议。
5 结论
标准中明确指出,所进行的结构垂直静挠度的测量和控制是对主梁,而不是对整个机构而言,但现在许多单位所用的有效悬臂静挠度的测量方法测出的数据,不仅包括有效悬臂静挠度的变形,还包括了起重机支腿变形的影响,是主梁有效悬臂处的垂直总变值,并不是主梁有效悬臂的垂直静挠度。若不加以区分,全都作为静挠度变形处理,是不准确的,容易发生错误判断。
因此,测量主梁有效悬臂处的垂直挠度时,应注意测量支腿顶部的垂直变形量,再通过有关计算消除支腿变形对有效悬臂静挠度的影响,然后才能与相关标准上规定的理论值进行比较,从而正确判定主梁钢结构悬臂的静态刚性。
