平动式啮合电机联合仿真研究
2012-06-19李瑞华
李瑞华
(许昌学院,河南许昌461000)
0 引 言
平动式啮合电机是一种利用定、转子间的磁场力驱动转子带动内平动啮合齿轮机构[1-2]输出低速大扭矩的高集成度电机。目前,平动式啮合电机已研制出多种样机[3-7],并进行了相关的理论研究,研究重点集中在静态磁场特性、磁路模型、控制方法等方面,这些研究主要有以下问题:一是采用的方法是基于等效磁路模型的解析方法,缺乏精确性和实用性;二是现有的研究都未将内平动啮合传动机构与电磁系统进行综合分析,建立的机械传动模型较为简单,不能够准确地描述平动式啮合电机的运行特性。产生以上问题的原因是由于平动式啮合电机的磁场特性与内啮合机构较为复杂[8],齿轮啮合的力学模型、磁场非线性特点使得该电机建模困难,精度也较差,这极大地影响了平动式啮合电机的发展。
本文提出了一种基于数值软件仿真分析的平动式啮合电机模型建立方法。分别采用磁场分析软件Ansoft Maxwell获得了电机的磁场力、磁链与气隙之间的特性,利用刚体动力学分析软件MSC Adams建立啮合与传动模型,将磁场分析数据导入控制软件MATLAB建立磁场力与电流、气隙的关系模型,并将MSC Adams建立的啮合与传动模型导入MATLAB中,建立了平动式啮合电机的机、电、磁联合仿真模型,可以较为准确且动态地分析平动式啮合电机。
1 运行原理与结构
本文以较为新型的双转子平动式啮合电机[9]为分析对象进行研究,其结构原理如图1所示。该电机的主要特征是在径向上布置了内转子与外转子两套转子,两套转子之间为定子及绕组。
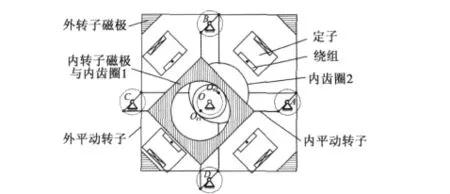
图1 结构原理
内、外平动转子上对称安装有4个磁极,转子通过滚动轴承与4个偏心轴连接,偏心轴通过滚动轴承与机壳连接。在偏心轴约束下,内、外平动转子可以相对于电机中心公转运动,而不能自转,同时公转相位角相差180°,这在径向上平衡了转子的偏心惯性力。电机的定、转子均由硅钢材料构成,适当控制4个定子绕组的通电顺序和电流大小,可以驱动转子围绕电机中心O做公转运动,同时带动与转子固联的内齿圈与外齿轮啮合,由外齿轮的输出低速、大扭矩的自转运动。
根据图1的原理机构,设计如图2所示的物理样机。该电机采用为内齿圈齿数为26,外齿轮齿数为24的2齿差内啮合机构,传动比为-13;定子与转子磁极均采用WTG1500硅钢片叠制而成。电机整体尺寸94 mm×94 mm×73.5 mm;绕组匝数380匝;定、转子铁心叠压厚度34 mm。
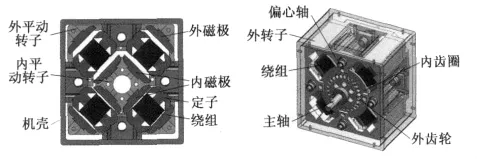
图2 物理样机
2 转矩分析与控制方法
2.1 转矩分析
从上述的原理机构中可以看出,双转子平动电机的转子只做公转运动,定、转子的磁极面在任意公转位置都相互平行,转子受到的磁场力总是指向同一个方向,不发生变化。根据双转子平动式啮合电机的结构特点,图3为转子处于任意两个公转位置时的受力情况。
图3中的O为电机几何中心;O1和 O2代表内转子(或外转子)公转轨迹中的两个不同位置。根据图1磁极的分布结构,将右上角设为磁极1,逆时针方向依次为磁极2、3、4。F1、F2、F3和 F4代表转子中心位于O1时磁极1、2、3和4的磁场力矢量;为转子中心处于 O2时的磁极力矢量。Fm和两个位置的磁场合力矢量,θm和为相应的相角,θr和为两个位置的转子位置角。
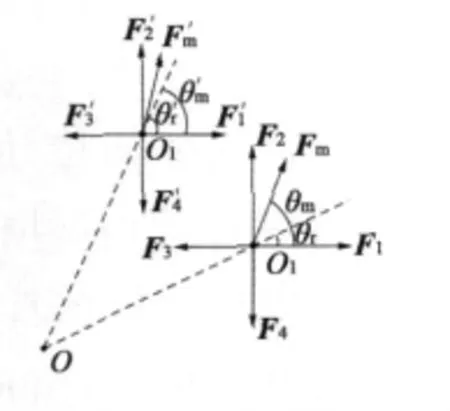
图3 转子受力情况
假设转子处于图3中的O1位置,Fm的分解为转子公转切向力Ft和径向力Fr,其关系如图4所示。
由图4可知,平动式啮合电机的转矩依靠磁场合力矢量的切向分力产生,可推导出输出转矩表达式:

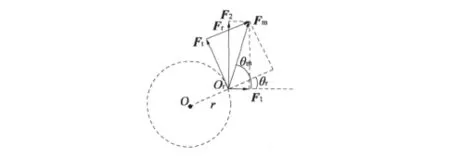
图4 转矩形成分析
式中:To为输出转矩;iz为减速比;r为转子公转半径,等于齿圈与外齿轮的半径差。
4个磁极的气隙长度设为 xa、xb、xc和 xd,它们与θr的关系:
2.2 控制方法
双转子平动式啮合电机的控制方法可以借鉴磁阻电机的控制方法[10-12]。根据式(1)可知,输出转矩To与|Fm|和相角θm有关,而Fm是磁极的磁场合力,磁极磁场力是绕组电流和气隙长度的函数,因此控制磁极磁场力的关键是根据不同的转子位置角,在绕组两端施加不同的电压实现电流的调节,从而控制磁场力的大小。
为使输出转矩最大,使 θm比 θr超前90°,即 θm-θr=90°,此时 To与|Fm|的幅值成正比。当平动转子处于不同象限时,参与工作的磁极不同,当平动转子在图3所示的第一象限位置时,磁极2、3处于工作状态;第二象限时,磁极3、4工作;第三象限时,磁极4、1工作;第四象限时,磁极1、2工作。在第一象限时,2、3磁场力可由下式计算:
式中:在给定To后,可以计算出磁极磁场力,作为控制目标输入给控制器调节相应磁极的磁场力。当平动转子在其他象限时,磁场力计算方法相同,需要考虑的是θr的变换。
3 仿真模型的建立
3.1 啮合传动机构仿真模型
MSC Adams提供的MATLAB仿真接口,可将MSC Adams中建立的平动式啮合电机机械模仿真导入MATLAB中与控制系统联合仿真。为提高仿真速度,要对电机的啮合传动机构进行简化。根据物理样机结构,取电机一侧的啮合传动机构为分析对象,并将机架简化成和齿圈一体的结构,忽略轴承等附属配件,简化后的模型它主要包含两个齿圈、一个外齿轮、4个偏心轴和一个输出轴四部分零件构成。图5为MSC Adams中建立的双转子平动电机的机械传动模型。
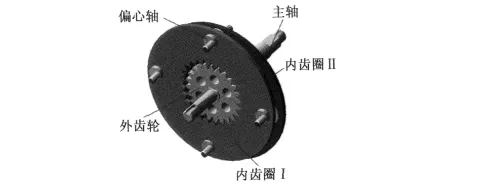
图5 MSC Adams仿真模型
将图5中的啮合模型添加约束,并设置状态变量,利用MSC Adams的Controls插件,导出状态空间模型,可以导入MATLAB的Simulink环境中。
3.2 磁极模型
磁极绕组的电流i与电压U、转子位置角θr有关,使用三维磁场有限元软件Ansoft Maxwell计算得到其基本形式为ψ(i,θr)的磁化曲线,如图6所示。
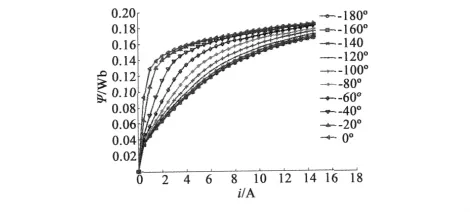
图6 磁链-转子位置角-电流曲线
为得到i(θr,ψ)形式的磁化曲线,可通过反演的方法[13],将 ψ(i,θr)转化为 i(θr,ψ),如图7 所示。反演有限元计算结果与Simulink间数据传递是整个仿真试验的关键之一。
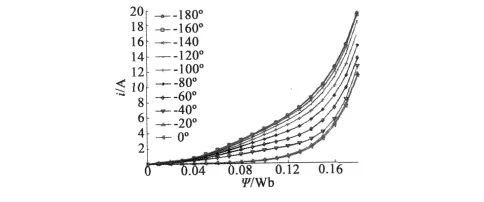
图7 反演后的i(ψ,θ)
为显示清楚,图7中的反演数据只显示了-180°~0°的10组结果。图8为有限元计算获得的磁场力。
图7、图8中的数据只计算了 -180°~0°的磁链、电流和磁场力特性,在0°~180°时的特性则呈对称变化趋势,不必重新计算。忽略驱动控制电路的压降、铁心的磁滞和涡流效应,平动式啮合电机绕组电压平衡方程:
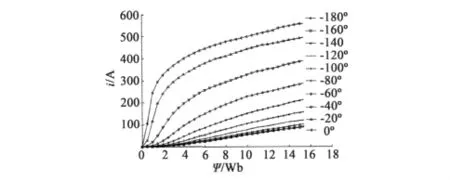
图8 磁场力有限元计算结果

式中:R为绕组电阻。
利用MATLAB中的Lookup_Table模块可以导入反演的数据,再根据上式可建立磁极仿真模块如图9所示。
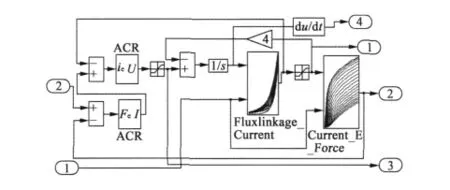
图9 单相磁极模型
其中的Fluxlinkage_Current为电流查表模块i(ψ,θ),里面存储了反演的数据。依据反演后的i(ψ,θ)曲线簇,任意给定一对(ψ,θ)值,就可以获得相对应的电流值。Current_E_Force模块为电磁力查表模块,在给定电流和转子位置角后可得到磁极磁场力。AFR为电磁力调节模块,根据提供的参考电磁力和转子位置角输出参考电流;ACR为电流调节模块,利用PID控制算法对绕组励磁电流进行控制,输出参考电压。
3.3 Simulink联合仿真模型的建立
在建立了磁极的有限元反演模型后,还需要建立其他辅助模块,主要包括转矩-电磁力转换模块、磁极位置角转换模块。依据平动式啮合电机的磁场、控制和转矩特性的特点,在Simulink中构建的RDMM电机整体仿真模型如图10所示。
图10中的Torque_Transfer为转矩-电磁力转换模块,根据转子位置角度和参考电磁力,对应计算出每个磁极需要输出的参考电磁力,并同时给出逻辑换相关系;RotorAngle_Transfer模块将转子位置角转化为转子对相对于4个磁极位置的夹角;Pole_A、B、C和D为单相磁极模块,其内部结构如图9所示;Fore_TorqueConvert的作用是将4个磁极的电磁力通过式(1)、式(3)计算电机的输出转矩;Gear_Model为图5的机械啮合传动机构动力学模型。
4 仿真分析
仿真中设定的参考输出转矩为4.8 N·m,负载转矩为2 N·m,饱和电压U=60 V,饱和电流18 A。在电机运行的任意时刻,控制模块中的Torque_Controller模块根据转子平动位置角将设定的平动转矩进行分解,转换为每个磁极磁场力的参考值,然后输入给磁极模块的AFR电磁力调节模块和ACR电流调节模块调整磁极磁场力跟随磁场力参考值。图11为负载2 N·m时的电机输出转速仿真曲线。
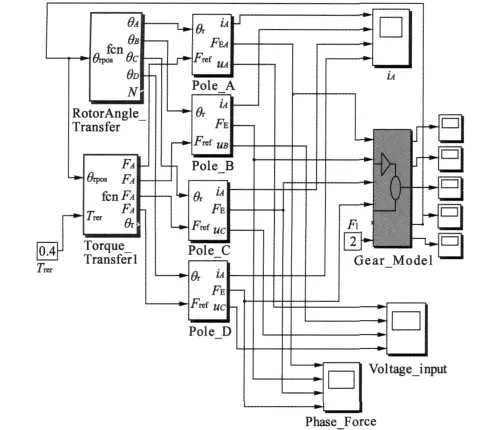
图10 径向驱动电机整体仿真模型
图11中的转速抖动是由于齿轮啮合中存在间隙引起的,但是波动较小,变化趋势说明了电机处于为恒加速状态。图12为输出转角变化曲线,曲线较为平滑,说明了电机的加速度恒定,输出转矩脉动较小。

图13(a)为磁极2绕组在0.3~0.5 s内的电压变化曲线,图13(b)为相应的电流变化曲线,从图中可以看出,双转子平动式啮合电机的电流也接近正弦波,这与传统的磁阻电机的电流特性较为相似。
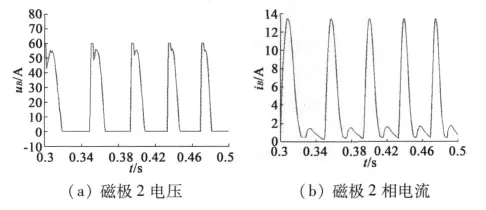
图13 磁极2电压、电流变化
为验证仿真模型的准确性,根据图2中的结构与参数制作了物理样机,并进行了加载试验,物理样机结构与试验装置如图14所示。
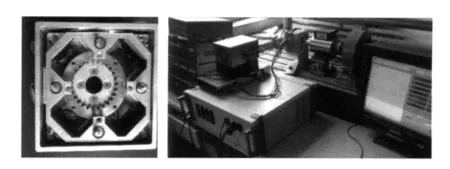
图14 物理样机与试验装置
图14 中的实验装置由扭矩传感器和磁粉制动器组成,通过测量软件能够实时测量转角、转速和转矩。图15为物理样机空载试验速度曲线与仿真结果的对比,样机驱动器工作电压限定在0~60 V范围内,电流在0~18 A内,与仿真设定一致。
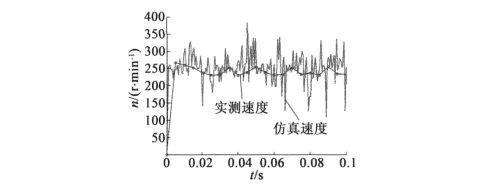
图15 仿真与试验结果对比
由于试验装置的数据采集系统采样频率较低,为200 Hz,而仿真采样速度较高,造成了图15中仿真速度曲线波动较大,试验曲线平直的现象。总体上可以看出,仿真结果与试验结果较为接近,说明了仿真模型能够较为准确地描述平动式啮合电机的运行特性。
5 结 论
平动式啮合电机的结构较新,没有可以直接借鉴的磁场分析模型,并且由于其气隙处于不断变化中,磁场特性较为复杂,对其定量分析时,磁路方法的计算结果不够精确。本文利用Ansoft Maxwell、MATLAB和MSC Adams建立了联合仿真模型对恒转矩控制算法进行了验证,仿真结果表明了该模型的准确性,并得到以下结论:
(1)相比于等效磁路方法,有限元方法计算精度高,对于平动式啮合电机复杂的磁路分析具有较高的可靠性;
(2)使用MSC Adams建立啮合传动机构的动力学模型较采用解析方法建立的模型具有简单直观和精度高的特点;
(3)利用MATLAB建立的控制模型,容易实现各种控制算法的研究,优化控制方法,提高平动式啮合电机性能。
[1]崔建昆,周洁深,刘小东.三环减速器的工作原理与功率流分析[J].机械设计与制造,2005,(2):74 -76.
[2]刘文芝,张乃仁,张春林,等.谐波齿轮传动中杯形柔轮的有限元计算与分析[J].机械工程学报,2006:42(4):52-57.
[3]徐强,廖启征,魏世民,等.新型平动式啮合电机的运行原理和静态转矩[J].电机与控制学报,2008,12(1):10 -19.
[4]徐强,廖启征,魏世民,等.平动式啮合电机的非线性等效磁路模型[J].电机与控制学报,2008,12(2):126 -131.
[5]徐强,廖启征,魏世民,等.柔性平动式啮合电动机结构原理及静态转矩[J].中国机械工程,2009,20(3):288 -292.
[6]李瑞华,廖启征,魏世民,等.径向驱动式啮合电机建模与仿真研究[J].电机与控制学报,2010,14(4):14 -19.
[7]李瑞华,廖启征,魏世民,等.径向驱动式啮合电机结构设计与静态转矩分析[J].高技术通讯,2011,21(3):297 -302.
[8]赵自强.分流型内平动齿轮传动特性及其试验研究[D].北京理工大学,2009.
[9]李瑞华,丁瑞华,王峰.双转子平动式啮合电动机设计与转矩分析[J].机械工程学报,2011,47(23):162 -179.
[10]王勉华,梁媛媛,宋景哲,等.直接转矩控制在开关磁阻电机中的应用与研究[J].电机与控制应用,2008,35(2):25 -29.
[11]雷淑英,张庆超,程晓玲.基于转矩矢量控制的开关磁阻电机汽车驱动系统[J].天津科技大学学报,2008,23(1):42 -45.
[12]丁文,梁得亮,鱼振民,等.基于磁链与转矩特性的开关磁阻电机建模研究[J].西安交通大学学报,2007,41(2):214-218.
[13]张海军,高瑞贞,张京军,等.基于有限元模型的开关磁阻电机系统控制仿真[J].煤炭学报,2008,7,33(7):831-836.