永磁同步直线电动机径向基神经网络PID控制
2012-06-19韩明文
韩明文,刘 军
(1.上海电机学院,上海200237;2.华东理工大学,上海200240)
0 引 言
直线电动机从结构上看是把旋转电机沿径向剖开拉直而形成的。其工作原理与普通旋转电机类似,都可以认为是由绕组电流产生气隙磁场进而与励磁磁场相互作用产生电磁推力。直线电动机相比于旋转电机省去了中间传动装置,具有结构简单、噪声低、速度快、精度高、组合灵活等优点,从而逐渐广泛应用于现代工业中[1]。
然而正是由于其没有中间传动装置,导致在结构上少了缓冲环节,使得参数摄动、负载变化等不确定因素的影响直接作用于电机,给系统控制带来一定的难度。传统PID控制具有结构简单、输出稳定、易实现等优点而至今被沿用,但在以高速高精、负载扰动大的加工场合,简单PID控制不能达到理想的控制效果[2-3]。针对以上现状,本文提出了RBF神经网络PID的控制策略,基于神经网络具有很强的自学习能力,能对各种扰动和模型的参数摄动进行实时学习,将RBF神经网络与传统PID相结合形成RBF神经网络整定PID控制,能在一定程度上改进传统PID控制器的性能。
1 永磁同步直线电动机模型
直线电动机只是旋转电机结构上的一种演变,其原理基本类似,因此采取与旋转电机相同的分析方法,由于直线电动机初级永磁体产生的磁动势为定值及在次极上无阻尼绕组,可以建立直线电动机的数学模型。仅考虑电流基波分量,做以下假设[4]:
(1)忽略铁心饱和;
(2)不计涡流和磁滞损耗;
(3)初级上没有阻尼绕组,永磁体也没有阻尼绕组;
(4)反电动势是正弦的;
由此可以得出直线电动机在d-q轴下的数学模型:


式中:ud、uq为直线电动机直轴和交轴电压;id、iq为直轴、交轴电流;R为电枢绕组的电阻;Ld、Lq为直轴、交轴电感;ψf为直线电动机永磁体磁链;V为直线电动机的速度;τ为极距。
直线电动机的推力:

在本文中,Ld=Lq=L,且在实际控制策略中,一般使id=0,因此推力方程可以简化:

永磁同步直线电动机的动力学方程:

式中:Fd为直线电动机的负载阻力;Bv为粘滞摩擦系数;m为直线电动机的质量。
由此可以得出直线电动机的简化结构框图如图1所示。

图1 PMLSM结构框图
2 RBF神经网络PID控制方法
经典的PID控制算法:

在经典的PID控制中,由于Kp、Ki、Kd三个参数的数值固定,即使初始数值设定合理,但对于一些复杂的控制对象,仍不能达到理想的控制效果[5-7]。而永磁同步直线电动机恰是具有很强的非线性和耦合性,并且在运行过程中存在负载变化和外部干扰等不确定因素,如果单纯只采用PID控制将不能很好地控制它的运行。本文采取RBF神经网络与PID相结合的控制方法。RBF神经网络逼近能力强,具有较快的学习速度且不会陷入局部最小[8-9];而常规PID控制易于实现,输出稳定且算法简单,将两者结合起来将使控制系统响应更快,自适应性和鲁棒性更强。基于RBF神经网络的PID控制结构如图2所示。
RBF主要是作为辨识器跟踪被控对象变化获得PID参数在线调整所需要的 Jacobian阵信息[10],从而PID控制器利用获得的信息实时地调整控制参数,实现PID参数的自整定,达到良好的控制效果。
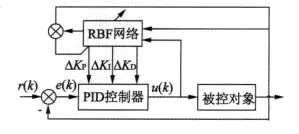
图2 RBF神经网络PID控制
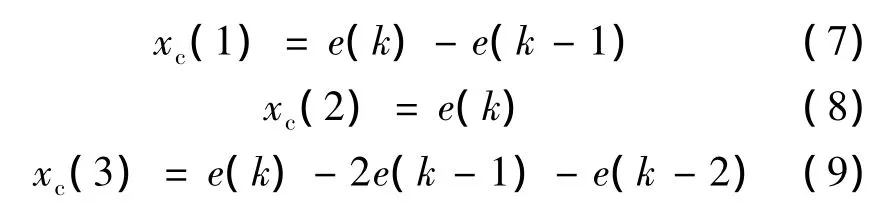
PID的输入:采用增量式PID,神经网络整定性能指标函数为,由梯度下降法得到 Kp、Ki、Kd的调整公式[11]:
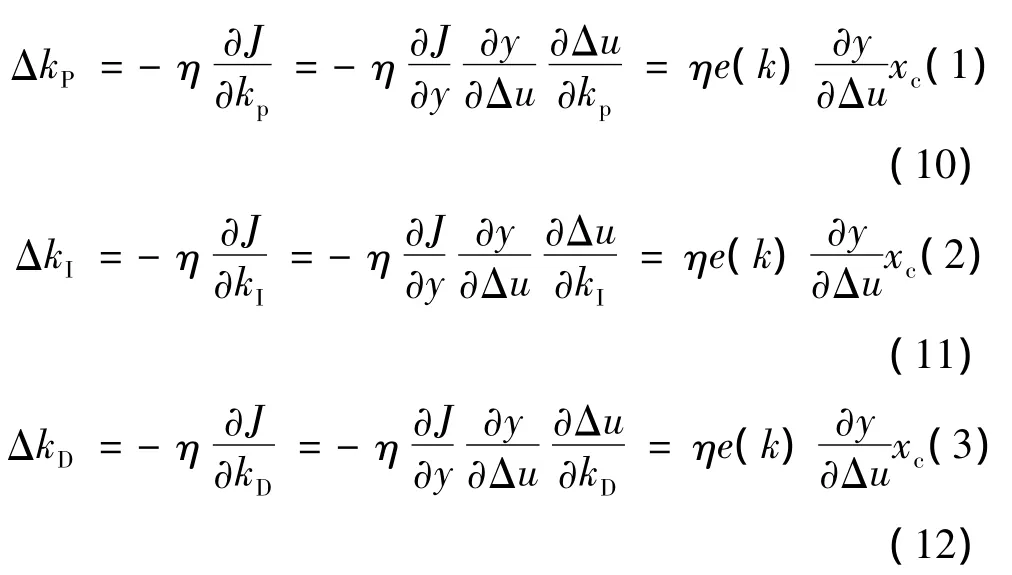
η为学习速率。Jacobian阵算法:

在本文中,速度环采用传统PID与神经网络改进型PID相并联的控制方式,并采用开关来根据实际情况采取相关控制类型,即当20%时,采用 RBF神经网络 PID控制;当 e(t)=时,采用常规PID控制。直线电动机整体控制框图如图3所示。
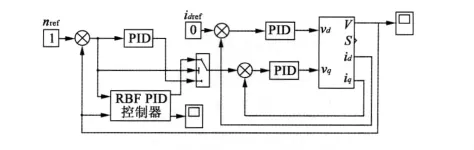
图3 永磁同步直线电动机的RBF神经网络PID控制
由于RBF神经网络PID不能直接用传递函数来描述,简单的Simulink无法对其进行仿真,在这里采用M文件下编写的S函数来代替。
3 系统仿真
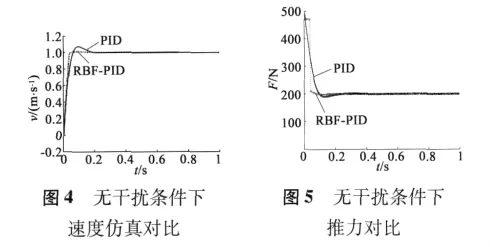
在仿真过程中,永磁同步直线电动机的仿真参数设置为 Rs=2.65 Ω,Ld=Lq=26.7 mH,Ψf=0.3 Wb,τ=16 mm,m=28 kg,Bv=4 N·s/m,Fd=200 N。仿真速度给定为1 m/s,在无干扰条件下,传统PID控制和RBF改进PID控制的速度和推力仿真结果如图4和图5所示。从速度波形可以看出,RBF神经网络PID控制不仅超调量更小,而且具有更快的响应速度。从图5可以得出,改进型PID控制可以使推力变化更加迅速与稳定。
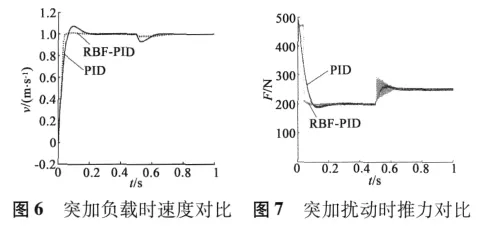
为了检测系统的抗干扰能力,在t=0.5 s时突加50 N的负载扰动,然后再进行仿真,其速度和推力仿真结果如图6和图7所示。从速度波形可以看出,改进型PID控制不仅超调量小,响应速度快,而且在突加扰动时的波动会较小,具有较强的抗干扰能力。推力在突然变化时,由于神经网络有一个学习的过程,所以有一定的波动,但整体结果优于传统PID控制。
4 结 语
本文针对直线电动机具有很强的非线性、参数摄动和负载扰动等特点,设计了RBF神经网络与传统PID控制相结合的一种新的控制方法,并应用于永磁同步直线电动机的速度环控制中。实验结果表明,神经网络PID控制具有较强的鲁棒性、响应速度快且抗干扰能力强。所以本文设计的RBF神经网络PID控制可以获得较好的静态和动态性能。
[1]张幼平,张代林.基于DSP的直线电机位置伺服控制策略研究[J].电机与控报,2006,10(1):61 -65.
[2]Hua Sun,Dai Yuehong.Fuzzy PID control and simulation experiment on permanent magnet linear synchronous motors[J].2010 International Conference onelectrical and Control Engineering,2010,39(5):1047-1049.
[3]AL-Marhoon W K,AL-Sunni F M,Ahmed M S.An RBF-based non - linear PID controller[J].Systems Analysis Modelling Simulation,2002,42(7):1107 -1118.
[4]孙宜标,郭庆鼎.基于神经网络给定补偿的交流永磁直线伺服系统滑模控制[J].电工技术学报,2002,17(3):21 -25.
[5]Ramon Vilanova,Carles Pedret.Optimality characteristic of PI/PID controllers:A combined min - max/ise interpretation[J].Chemical Engineering Communicatios,2010,197(9):1240 -1260.
[6]Lu Hungching,Tseng Tzuyu.Design and implementation of the CMAC-Based controller for permanent magnet synchronous motor[J].Electric Power Component and Systems,2005,33(9):1015-1037.
[7]Wang Mingshyan,Kung Yingshieh,Hanh Nguyen Thi,et al.Adaptive low-speed control of permanent magnet synchronous motors[J].Electric Power ComponentsandSystems,2011,39(6):563 -575.
[8]Fan Xu,Meng Fanlin,et al.Research of brushless DC motor simulation system based on RBF - PID algorithm[J].Second International Symposium on Knowledge Acquisition and Modeling,2009,2:277-280.
[9]Liu Kun,Wang Mulan,Zuo Jianmin.An optimal PID controller for linear servo - System using RBF neural networks[C]//International Conference on Computational,Intelligence and Software Engineering,2009:1 -4.
[10]黄春庆,彭侠夫,王军平.具有不确定雅克比矩阵机器人的鲁棒非线性PID控制器的抗饱和失效设计[J].自动化学报,2008,34(9):1113 -1120.
[11]张国忠.智能控制系统及应用[M].北京:中国电力出版社,2007.