基于有限元分析的永磁无刷直流电动机优化设计
2012-06-19黄迪西
黄迪西,崔 群,房 菁
(安徽工程大学,安徽芜湖241000)
0 引 言
近年来,随着电力电子技术的发展和永磁材料价格不断降低,永磁无刷直流电动机得到前所未有的发展。永磁无刷直流电动机可以克服有刷直流电动机换相易产生火花、损耗大、寿命短的缺点;同时永磁无刷直流电动机还具有调速性能好、起动转矩大等优点[1]。在永磁无刷直流电动机性能分析方法中,国内外应用较多的是基于磁路法的经验公式或者是基于麦克斯韦方程的电磁场有限元分析。本文利用经验公式对电机的尺寸和参数进行初步设计,然后利用电磁场有限元分析软件Ansoft Maxwell V12对永磁无刷直流电动机进行优化设计。
1 有限元分析原理
1.1 二维有限元分析原理
有限元求解的基本原理是将整个区域划分为许多小的区域,然后将求解边值问题的原理应用在每个小区域中,最后将各个小区域的结果总和起来得到整个区域的解。在稳态情况下电磁场问题可表示成如下方程组:
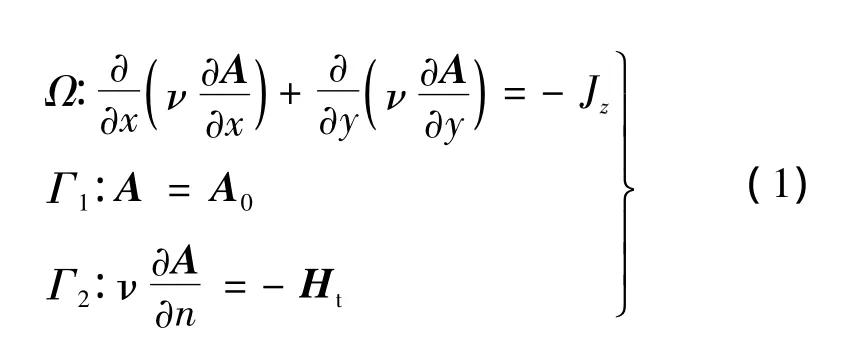
式中:A表示磁矢量;ν表示磁阻率;Ht表示磁场强度的切向分量;Jz表示源电流密度;Γ1表示一类边界条件;Γ2表示二类边界条件。
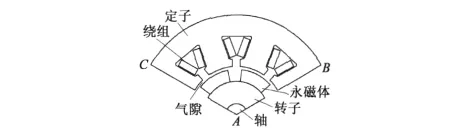
图1 永磁无刷直流电动机的求解区域
图1 是无刷直流电动机有限元分析求解域,两条径向线上磁场相等,即满足关系:

电机定子外径BC处磁场可近似为零,因此需要施加磁通平行边界条件,即BC满足关系:

1.2 网格剖分原理
有限元法在电磁场中的应用实质是把麦克斯韦方程组离散化后求解,而求解域的离散化过程的关键是对网格进行剖分。通过网格剖分可将式(1)等价于以下变分问题:
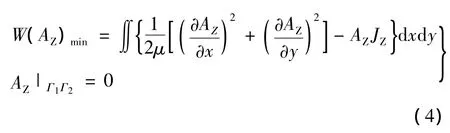
通过利用插值法即可将式(4)条件变分问题转化为多元函数极值问题,即可得到磁场的数值解。二维磁场中采常用三角形剖分形式,离散网格的划分决定有限元计算的精度,因此在划分网格时要确保单元疏密的合理性。图2是经过剖分离散化后的求解区域。

图2 永磁无刷直流电动机网格剖分图
从图2中可以看出,为保证有限元分析的计算精度,仿真时对电机的特殊求解区域进行了加密处理。
2 二维电磁场有限元分析
2.1 二维有限元模型的建立
根据基于磁路法的经验公式[4-5]对电机的尺寸进行估算,然后利用Ansoft RMxprt模块对电机的尺寸和参数进行优化,表1给出了初步经过优化后的电机尺寸。根据表1的尺寸,在Ansoft Maxwell模块中将电机的二维模型画出,如图3所示。
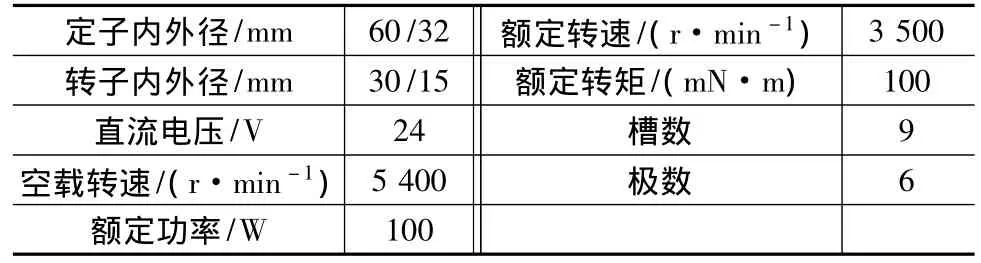
表1 电机主要参数表
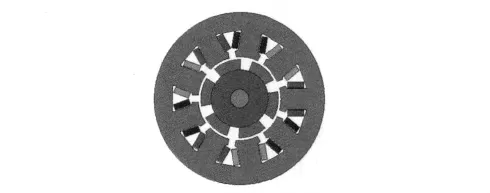
图3 二维模型示意图
二维瞬态场求解器可以求解模型中存在运动状态的情况。瞬态场中矢量磁位满足关系:

式中:ν表示运动物体速度;Js表示电流密度;Hc表示永磁体矫顽力。
瞬态场求解器中运动方程:

因此,有限元模型中任意时刻的每一点矢量磁位都可获得。
2.2 考虑电机起动过程的瞬态分析
二维有限元考虑电机的起动过程的瞬态分析,主要考察电机在空载和额定负载的情况下电机转速能否达到空载转速和额定转速以及电机从初始转速为零到稳速工作状态的时间信息、电压电流变化信息等。图4是电机考虑起动过程时电机性能的曲线。
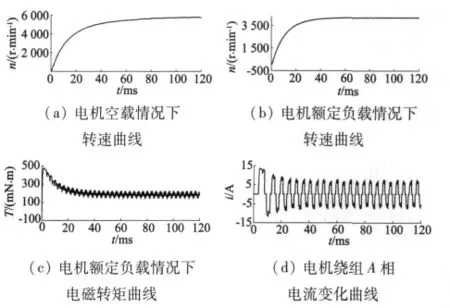
图4 电机从起动到额定转速下电机性能曲线
从图4中可以看出,电机的空载转速可以达到5 500 r/min,满足电机设计要求;电机在额定负载情况下,电机转速最终在4 200 r/min左右平衡,达到了额定转速为4 000 r/min的要求;电机在稳速下电磁转矩为190 mN·m,大于电机的额定转矩;电机在起动过程中电流幅值能达到13 A,明显高于稳速情况下的电流,由于电机起动时间约为30 ms,持续时间很短,因此起动时的大电流对电机影响不大。
2.3 不考虑电机起动过程的瞬态分析
根据图4得知,电机在4 200 r/min时稳速,而电机的额定转速为4 000 r/min,为了分析电机在4 000 r/min时电机的性能,此时不考虑电机的起动过程,将电机转速固定在4 000 r/min考察电机特性和参数。由于永磁无刷直流电动机的控制器对电机的磁场磁链等参数会有影响,因此对电机的仿真分析需要分接控制电路和不接控制电路两种情况。当不接控制电路时,将电机转速固定在4 000 r/min,此时电动机相当于发电机空载模式,可以分析电机本体在额定转速下产生磁链、反电势和齿槽转矩等信息,为进一步对电机优化提供一定的依据和基础;当接控制电路时,将电机转速固定在4 000 r/min,可以分析出电机在额定状态下,控制电路对电机特性的影响。图5为不接控制电路时电机特性曲线,图6是接控制电路的电机特性曲线。
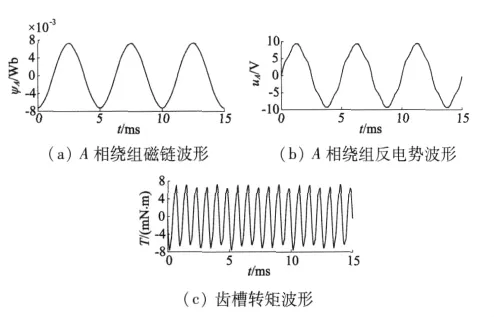
图5 不接外电路电机在额定转速下特性曲线
从图5可以看出,A相绕组磁链波形为正弦波,说明气隙磁场按正弦波分布;反电势波形近似为正弦波,通过对反电势波形进行傅里叶分析可得出反电势的THD为4% ,满足电机的谐波要求;电机齿槽转矩幅值为7 mN·m,齿槽转矩约占电机额定转矩的7% ,这说明电机的齿槽转矩较大,需要对其进一步优化设计。
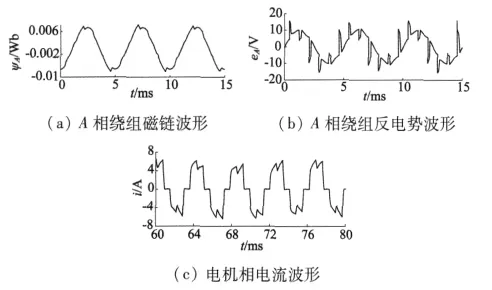
图6 接控制电路时的电机特性曲线
从图6可以看出,当电机外接控制电路时,电机的磁链和反电势波形均出现毛刺,这是由于电机控制电路换相时产生的,由于毛刺幅值没有出现较大波形,且持续时间很短,对永磁无刷直流电动机属正常现象,若换相毛刺过大,则有可能会出现噪声,此时需要从电机的齿槽配合和控制器对换相的控制两个角度来消除噪声。
3 三维电磁场有限元分析
3.1 电机三维模型及其网格剖分单元的建立
根据永磁无刷直流电动机的二维模型,画出电机的三维模型,如图7所示。从图中可以看出,三维模型考虑了电机的端部效应,即:二维模型只考虑了电机的一个截面,而三维模型考虑了电机的整体。
图7 三维有限元分析电机模型
三维网格剖分单元类型有很多种,目前应用较多的三维网格剖分单元是四节点四面体网格单元。图8是一个四节点四面体网格单元在三维坐标中的示意图。将该网格单元标记为“m”,顶点 i、j、k、l坐标如图8所示,磁场储能分别为 φi、φj、φk、φl。对于节点为“i”的形函数 ψmi可表示:
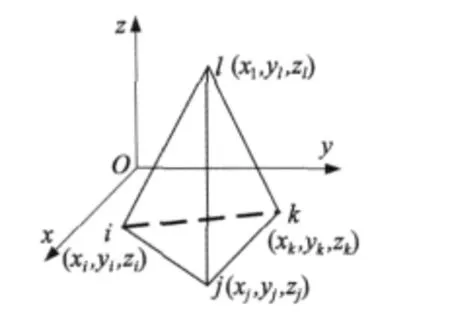
图8 四面体单元形状

式(8)实际上构成了求解系数的方程组,矩阵形式表示如下:
利用克莱姆法则便可以得到以上4个系数值。矢量磁位函数在该有限元求解域中分布由各个节点的磁场储能值的乘积叠加而成。

式(10)是关于磁场能量的线性插值函数,能够求解出每个小的求解域的磁场能量,然后利用累加方法即可求出整个电机求解域的储能值。图9是电机模型的网格剖分图。
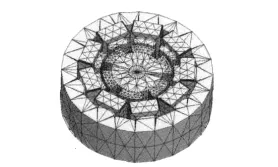
图9 电机模型的网格剖分图
3.2 三维静磁场计算原理及分析
三维静磁场采用的计算方法是“棱边法”。三维静磁场可用来分析永磁材料,对永磁材料的处理通常采用体电流法和等效面电流法。
三维磁场麦克斯韦方程如下:

式中:B(x,y,z)为磁感应磁强度;H(x,y,z)为磁场强度;J(x,y,z)为电流密度,这三个矢量的各个方向矢量的函数关系如下:

Bx、By、Bz为三个方向上的标量磁感应强度。对于永磁体可按照下式描述:

式中:μr为相对磁导率;μ0为真空磁导率;MP永磁材料极化强度。
对于表面贴装式永磁体,三维磁场将其表示成:
磁场强度H可由下式描述

式中:HC为永磁体上的磁场强度;φ为标量磁位;HP为四面体6条棱的磁场强度。
图10和图11给出了电机整体的磁密云图和磁矢量图。从图中可以看出,磁密在电机中分布均匀,槽底角处磁密较高,需要将槽底的倒角增大以减小磁密;电机的齿部磁密可达到1.4 T,达到电机最佳齿磁密值,说明电机齿磁密设计合理。图12是电机气隙磁场分布。从图中可以看出,电机气隙磁密最大值为0.9 T,平均值为0.5 T,均达到电机气隙磁密的典型值,说明电机气隙设置合理。
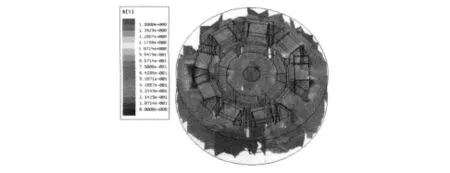
图10 三维磁场电机磁密云图
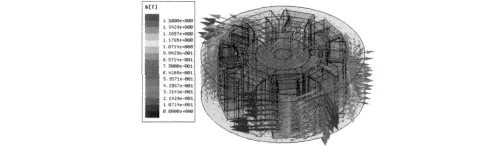
图11 三维磁场电机磁密矢量分布图
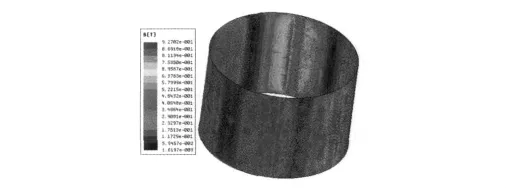
图12 电机气隙磁场分布图
4 实验结果及讨论
本文对额定功率为45 W的永磁无刷直流电动机的样机进行实验。24 V直流电源给控制器供电,控制器驱动电机的三相绕组。电机的负载转矩由转矩测试仪给定,通过转矩测试仪可以给电机加上不同的负载。
实验表明:电机的空载转速可以达到6 000 r/min,电机的额定转速可以达到4 000 r/min,均满足设计要求。图13是4 000 r/min时相电流波形图。从图13波形图中可以看出,电流导通时段平均值约为6 A,与仿真的结果(图6(c))相近,实验的波形与软件仿真的波形也相同,说明电机的整体性能和参数可满足要求。
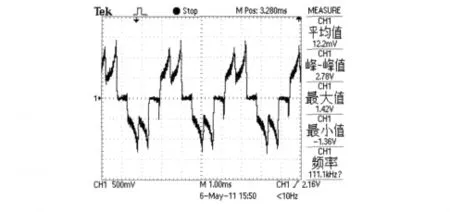
图13 4 000 r/min时相电流波形图
5 结 语
本文根据磁路法中永磁无刷直流电动机设计的经验公式和Ansoft软件的RMxprt模块对电机进行设计,建立电机的初始模型,然后利用 Maxwell 2D和3D模块来对电机初始模型进行优化设计,完成电机整体性能的仿真。在2D模型中通过对电机的瞬态起动过程的分析,在3D模型中通过对电机各部分磁场分布的观察,从而提出了对永磁无刷直流电动机设计的完整过程及其相应的方法。仿真计算结果和实验数据表明,有限元分析法可以得到较为准确的计算电机的起动性能、运行状态等参数,可以实现性能最优的目标。
[1]陈亚玲.永磁无刷直流电机的发展及应用[M].电气开关,2010(04):62 -63,66.
[2]Hutton D V.有限元分析基础[M].武建华,译.重庆:重庆大学出版社,2007.
[3]赵博,张洪亮.Ansoft 12在工程电磁场中的应用[M].北京:中国水利水电出版社,2010.
[4]陈世坤.电机设计[M].北京:机械工业出版社,2000.
[5]唐任远.现代永磁电机理论与设计[M].北京:机械工业出版社,1997.
[6]Yamazaki K.A quasi formulation for analyzing characteristics of induction motors with skewed slots[J].IEEE Transactions on Magnetics,1998,34(5):3624 -3627.
[7]Valtonen M S M,Parviaiene D S A,Pyrhānen J.Electromagnetic field analysis of 3D structure of axial-flux solid-rotor induction motor[C]//International Symposium on Power Electronics,Electrical Drives,Automation and Motion,Taormina,Italy,2006,39(20):12-16.
[8]王长清.现代计算电磁学基础[M].北京:北京大学出版社,2005.