永磁同步电机在线多参数辨识方法研究
2012-06-19刘忠途李乐荣宗志坚
刘 亢,刘忠途,李乐荣,宗志坚
(中山大学,广东广州510006)
0 引 言
目前针对永磁同步电动机伺服系统调速控制较为成熟的方法主要有两种[1]:矢量控制和直接转矩控制。矢量控制策略中电流环响应速度远大于转速环,电流环控制器参数的设定直接左右整个控制系统的性能,而电机定子参数(定子电阻与电感)对电流环控制器设计影响最大,速度环控制器参数的整定也受到电流环控制器参数设计的影响,同样离不开定子参数的辨识;直接转矩控制策略中将电磁转矩与定子磁链矢量作为控制变量,对定子磁链矢量的准确估计十分关键,而定子磁链矢量估计是否正确取决于永磁电机参数的精确辨识。对于现代永磁同步电动机控制的其它方法,如弱磁控制、最小损耗控制、自适应控制等也依赖于电机参数的精确辨识[2-4]。
由于永磁同步电动机系统多变量、非线性、强耦合的特点,在实际应用中往往需要同时用到多个参数,如果能够找到一种算法简单且能够快速同时辨识多个电机参数的方法,对于电机控制精度的提高与电机运行状态的准确监视具有重大意义。国内外诸多学者对电机多参数辨识策略进行了研究。文献[5]运用EKF(扩展卡尔曼滤波)法完成了内埋式永磁同步电动机永磁磁链的在线辨识,但其假定系统噪声及测量噪声已知且算法较为复杂。文献[6]借助POPOV超稳定理论建立了永磁同步电动机的参数辨识模型,保证了系统稳定性与参数收敛性,参考模型、电压模型中包含有纯积分环节,影响辨识结果,算法较EKF更为复杂。文献[7]将带遗忘因子最小二乘方法应用于定子电阻、定子绕组电感与永磁体磁链的在线辨识,但是辨识过程中需周期性阶跃改变q轴电流,实用价值不高。文献[8]把多新息最小二乘法引入到感应电机参数辨识中来,但其未加入遗忘因子对协方差矩阵进行更新,跟踪精度不高。
本文采用带遗忘因子的多新息最小二乘法,对面装式永磁同步电动机进行在线参数辨识,该方法仅利用定子电压、电流信号和转速信号,减少了其它因素干扰;多新息方法可以抑制坏数据对参数辨识的影响,具有较强的鲁棒性,而合理选择遗忘因子对协方差矩阵可进行更新,可以加速辨识参数的收敛。仿真结果表明辨识具有较好收敛性、鲁棒性与较高精度。
1 多新息最小二乘法
最小二乘法又称最小平方法,通过最小化误差的平方和来寻找模型的最佳函数匹配。目前,最小二乘法在系统辨识领域应用广泛,在许多方法失效的情况下,最小二乘法依然能够简单有效的解决问题。但同时最小二乘法有一些缺陷:最小二乘估计结果保持无偏性、一致性的前提是系统干扰为均匀白噪声,但很多情况下系统干扰充满随机性;运算过程中伴随数据量的增长,算法易出现数据饱和现象。针对这些缺陷,中外学者提出了一些改进算法[9],如递推最小二乘法、相关分析最小二乘法、增加辅助变量法、增广矩阵法等。本文将多新息辨识方法[10]同最小二乘法相结合,通过新息矩阵与遗忘因子来修正最小二乘法。
考虑下列时变系统:

式中:θ为系统的时变参数向量,y(t)∈R1为系统输出,u(t)∈R1为系统输入,φ(t)∈Rn是由系统输入输出数据(y(t-1),u(t-1),y(t-2),u(t-2),…)构成的新息向量,v(t)∈R1为系统受到的噪声向量。
估计参数θ的最小二乘算法可表示:

式中:e(t)=y(t)-φT(t)θ(t-1)为标量新息;L(k)∈Rn为增益向量。e(t)作为标量新息代表迭代过程中单步的新息,称为单新息(single-innovation)。将单新息e(t)加以推广,发展成为多新息辨识方法[11],它是通过新息向量 E(p,t)∈Rp,即多新息(multi-innovation)来进行参数辨识。多新息E(p,t)包括了迭代过程中p步的新息,同样将输出向量y(t)扩展为累积输出向量Y(p,t),将新息向量φ(t)扩展为累积新息矩阵φT(p,t),将噪声向量v(t)扩展为噪声矩阵V(p,t)。定义如下:

此时可以得到系统的多新息辨识模型:

引入遗忘因子对协方差矩阵进行更新,估算系统多新息模型参数向量θ(t)的最小二乘法表示如下:

P(t)为协方差矩阵。
在跟踪时变参数时,多新息最小二乘法也一样存在数据饱和的问题。选择合适的遗忘因子λ,用于更新协方差矩阵P(t),以降低过去测量值的比重,增加当前测量值的比重,以减小数据饱和问题对辨识系统的影响。
当多新息p=1时,该算法就退化为递推最小二乘辨识算法(RLS),所以说多新息最小二乘法是RLS的一种推广,通过多新息的引用,能够抑制坏数据的影响,提高参数估计精度并具有较强鲁棒性。
2 永磁同步电动机动态模型
永磁同步电动机采用永磁体转子进行励磁,不加入励磁绕组及直流励磁电源,省去励磁损耗,提高了电机效率与功率密度;取消了容易出问题的电刷与集电环,使结构更为简单,运行更为可靠。正弦波永磁同步电动机于d-q坐标系建立数学模型,不仅可以分析电机的稳态运行性能,也可用于分析电机的瞬态性能。
在建立永磁同步电动机d-q轴数学模型之前对电机本体及外界影响做出一些假设[12],永磁同步电动机的电压方程式:

机械运动方程式:

方程中各量均为瞬态值。ud、uq为定子绕组的d、q轴电压;id、iq为定子绕组的 d、q轴电流;ωr为电气角速度;p为极对数;ωm为机械角速度Ld、Lq为定子绕组的d、q轴电感;Rs为定子相电阻;ψf为永磁体产生的磁链;J为转动惯量(包括转子转动惯量与负载折算的转动惯量);Te为电机电磁转矩;TL为负载转矩;B为运动阻尼系数;p为微分算子。
3 永磁同步电动机多参数辨识
为了应用多新息最小二乘法(MILS),需要对永磁同步电动机转子坐标系下电压方程式(13)进行离散化。由于本文选择R、L、ψf为辨识对象,因此仅需对q轴电压方程进行离散。对于面装式永磁同步电动机Ld=Lq=L,取足够小的采样时间Ts,那么:
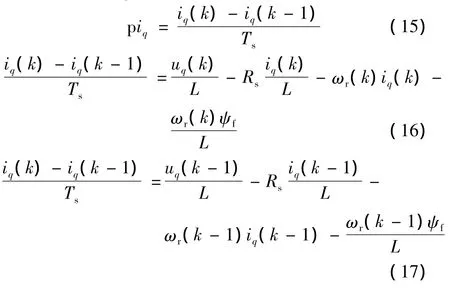
由式(16)、式(17)即可得永磁同步电动机离散动态方程:

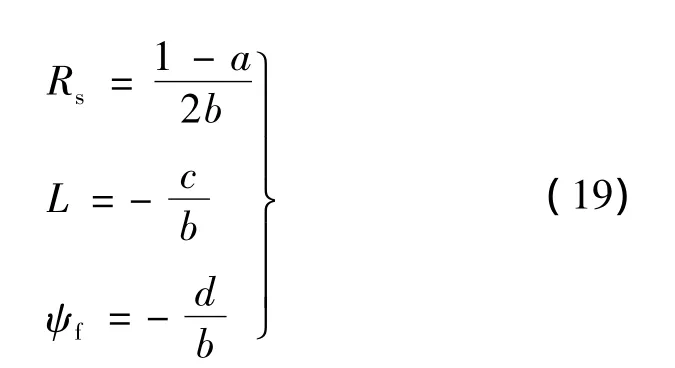
从而可以利用多新息最小二乘法对Rs、L、ψf进行在线辨识,对应于算法模型:
综上可知,仅需要检测定子电压、电流、转速信号即可估算出定子电阻、电感与转子永磁体磁链,易于工程实现。
4 辨识系统仿真分析
在MATLAB/Simulink中建立仿真系统如图1所示。控制系统采取速度、电流双闭环控制;控制策略选用经典的id=0策略。模型中永磁同步电机参数:额定功率PN=1.2 kW,额定转速nN=3 000 r/min,额定转矩 TN=4 N·m,定子电阻 Rs=1.05 Ω,电感 L=3.28 mH,转子永磁体磁链 ψf=0.133 Wb,极对数 p=4,转子惯量J=0.54 ×10-3kg·m2,转矩系数KT=0.8 N·m/A。给定转速nref=300 r/min,电机负载为恒扭矩TL=1 N·m。
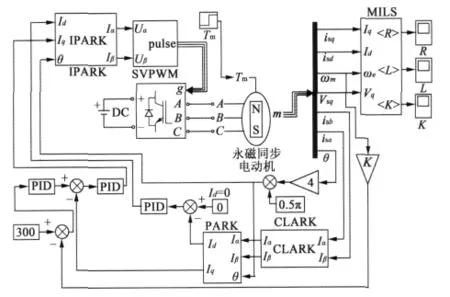
图1 矢量控制系统框图
通过S-Function建立MILS辨识模块,通过对电机电压、电流、转速信号的采样,经离散化后进行多新息最小二乘法迭代,仿真步长Ts=1×10-5s,仿真系统运行1 s,多新息长度分别取p=1(相当于RLS)、p=3以作比较,遗忘因子 λ=0.999 5。图2至图4显示了各参数在不同多新息长度下的收敛过程。
电感真实值L=3.28 mH,辨识结果如图2所示。
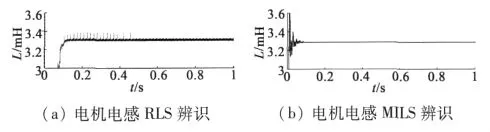
图2 电感辨识
永磁体磁链真实值ψf=0.133 Wb,辨识结果如图3所示。
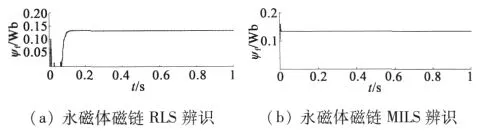
图3 磁链辨识
电机定子电阻Rs=1.05 Ω,辨识结果如图4所示。

图4 定子电阻辨识
从图2~图4可以看出,多新息最小二乘法的实验结果较好地收敛于电机参数的真实值。与传统的RLS辨识方法相比,MILS辨识响应更快,波动更小,精度更高。
为验证算法的鲁棒性,以磁链辨识为例。设定电机负载阶跃变化,初始TL=1 N·m,加载TL=4 N·m,辨识结果如图5所示。
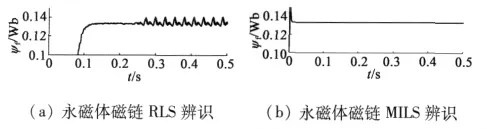
图5 阶跃负载下永磁体磁链辨识
从图5中可以明显看出,RLS辨识方法在阶跃负载输入时波动较大,甚至短时间内无法收敛;而MILS辨识方法几乎没有受到影响。这说明多新息方法相比于单新息方法具有先天的优势,由于多新息的采用削弱了外界干扰及坏数据的影响,具有较强的鲁棒性。
5 结 语
本文介绍了一种永磁同步电动机的在线多参数辨识方法,根据易于采集的定子电压、电流、转速信号,利用多新息最小二乘法(MILS)下的辨识模型估算出电机的定子电阻、电感与永磁体磁链。
仿真结果表明:通过多新息的引入,提高了辨识收敛性、削弱了辨识的波动;加入遗忘因子对协方差矩阵进行更新,避免了因数据饱和造成的一系列问题;辨识结果更为准确,适用于永磁同步电动机自适应控制、实时状态监测的高精度场合,具有重要意义。
[1]吴卫安.永磁同步电机调速系统研究[M].武汉:华中科技大学,2007.
[2]李高林.基于电动车的永磁同步电机的弱磁控制[J].电力电子技术,2010(6):88-89.
[3]Rongmin C.Low -speed performance research for permanent magnet synchronous linear motor based on nonparametric model learning adaptive control[C]//2011 International Conference on Electrical Machines and Systems.2011:1 -5.
[4]王晓磊,赵克友.永磁同步电机最小损耗的直接转矩控制[J].电机与控制学报,2007(4):331-334.
[5]史宇超.内埋式永磁同步电机永磁磁链的在线辨识[J].电工技术学报,2011(9):48-53.
[6]安群涛,孙力,赵克.一种永磁同步电动机参数的自适应在线辨识方法[J].电工技术学报,2008(6):31 -36.
[7]Ramakrishnan R.Real time estimation of parameters for controlling and monitoring permanent magnet synchronous motors[C]//IEEE International Electric Machines and Drives Conference.2009:1194-1199.
[8]陈中伟,沈艳霞.基于多新息最小二乘的感应电机参数辨识策略[J].江南大学学报(自然科学版),2010(5):531 -535.
[9]刘永钦,沈艳霞,纪志成.改进型最小二乘法在PMSM参数辨识中的应用[J].微特电机,2008(11):19 -22.
[10]丁锋,谢新民,方崇智.时变系统辨识的多新息方法[J].自动化学报,1996(1):85-91.
[11]常亮.基于加权多新息方法的系统辨识[D].哈尔滨:哈尔滨工业大学,2010.
[12]张侨.永磁同步电机参数辨识的研究[D].武汉:华中科技大学,2010.