基于测量机器人的深基坑围护结构变形监测技术探讨
2012-06-15庞红军卫建东黄威然
庞红军,卫建东,黄威然
(1.中铁隧道股份有限公司,郑州 450009;2.解放军信息工程大学测绘学院,郑州 450052;3.广州地铁设计研究院,广州 510010)
0 引言
伴随着经济的增长和城市建设的快速发展,城市土地变得越来越珍贵,向空中求发展,向地下深层要土地成了建筑商追求经济利益的常用手段。目前,开挖深度超过5 m的深基坑已成为普遍现象[1],特别是地铁站的建设,基坑深度达20 m。由于仅根据地质勘察资料和室内试验参数来确定设计和施工方案含有许多不确定因素,加上城市中多层、高层建筑密集,基坑开挖会对周围建筑的稳定造成一定影响,尤其是基坑旁边的老建筑物,许多只有条形基础,甚至砖基础,所以,对施工过程中引发的土体变形、环境变化、邻近建筑物变形、地下管线变形等监测已成了工程建设必不可少的重要环节。基坑监测与工程设计、施工同被列为保证深基坑工程质量的3大基本要素。
在目前基坑监测的内容中,基坑围护结构体三维位移(沉降和水平位移)监测是主要的监测内容之一。李瑞杰[2]和戈修忠[3]采用常规的基坑围护结构变形监测方法,顶部沉降采用水准测量,顶部水平位移采用经纬仪视准线法、小角度法等进行测量,不同深度的水平位移采用测斜仪测量方法,不同深度的沉降采用深层沉降仪进行监测,每项监测内容都要布设对应的监测点,采用对应的监测方法和监测设备来完成,所需的观测设备和观测人员较多,监测成本较大,同时,预埋的测斜管一旦被破坏将很难恢复。
测量机器人是具有自动识别目标与照准功能的智能全站仪的俗称(如徕卡公司生产的TCA2003、TS30,天宝公司生产的S8)。该类型全站仪具有水平、垂直2个方向的马达驱动和用于目标识别的CCD结构,加上二次开发的自动控制测量程序,能够实现棱镜目标点的自动寻找和照准,可以对安装有棱镜的变形点进行自动测量,获取空间位置点的三维坐标信息。詹美斌等[4]对大坝监测进行了阐述,郑立常等[5]对运营地铁隧道自动化监测进行了论述。相对于深基坑围护结构使用传统测量方法的费工、费时、低效、不能动态监测,使用测量机器人对其进行动态、高效、高精度监测就显得尤其重要,但测量机器人目前仅在大坝、高铁等施工测量、监测领域和运营地铁隧道自动化监测中得到成功应用,其测量条件优越,视野开阔,使用全站仪自带的软件或开发一些简单的软件就可以实现,而未涉及到环境相对恶劣的深基坑测量机器人自动监测的相关研究和探讨。本文针对测量机器人在监测方面的优势,提出基于测量机器人开发的基坑围护结构变形监测系统,能适用于放坡开挖、有围护结构的基坑监测或做为测斜管被破坏后的补充监测手段。相对于传统监测方法的低效、监测时间长等缺点,基于测量机器人开发的基坑围护结构变形监测系统可以实现全天候、动态的变形监测,使监测数据能实时地、有效地保证信息化施工,保证施工安全,为施工方案提供真实的、动态的数据。
1 监测网的布设
1.1 变形监测点的设置和保护
根据基坑围护结构监测要求,监测点应选在基坑围护结构顶部和基坑壁上。为监测基坑不同深度的水平位移和沉降,基坑壁上的监测点按垂直断面方向布设。监测点上安装可供全站仪自动照准与测量的标志,考虑经济因素,一般采用L小棱镜。
监测断面之间的距离一般为10~20 m,每个断面沿深度方向相邻点间距一般以1.5~2.0 m为宜,图1中的D2-1、D2-2、D2-3、D2-4为第2断面的4个点。设置监测点时,可将专用螺丝锚固在基座里面,基座周围有螺纹,可以加保护罩,在基坑壁上测量时将对应的棱镜安装在专用螺丝上,测量完将棱镜取走,盖上保护罩,以保护螺丝不被损坏,在保护较好的条件下,也可不取走棱镜。基准点设置在基坑四周不受基坑变形干扰处,如已建成的建筑物或构筑物上,一般布设3~5个,形成边角网,基准点同样安装测量棱镜,由于基准点离测站点较远,一般采用标准圆棱镜。
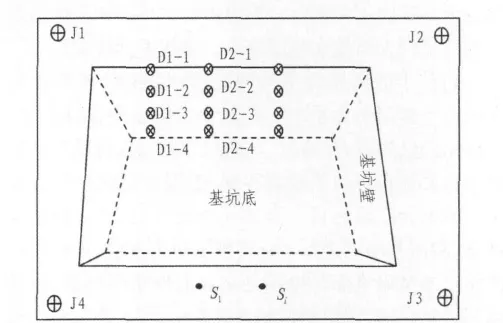
图1 基准点和监测点分布图Fig.1 Layout of reference points and monitoring points
1.2 测站点的设置
测站点通常选在通视条件好、受施工干扰小的区域,如图1中的S1,Si位置。由于现场施工条件的限制,全站仪每次设站不会严格重合于同一位置,也不需要重合,只要全站仪能够与每个棱镜监测点通视即可,采用三脚架架设仪器。
2 自动测量的测量方法及流程
2.1 自动寻找并照准目标的方法
自动测量全站仪具有自动寻找和照准棱镜目标进行测量的功能,用户指定搜索范围,全站仪自动在该范围内寻找棱镜目标点。如果在搜索范围内没有找到棱镜目标点,全站仪将回到起始位置。如果在搜索范围内找到棱镜目标点,全站仪将精确照准棱镜点。如果在搜索范围内存在多个棱镜目标点,自动全站仪将精确照准首先发现的棱镜点,条件是该棱镜点在全站仪的观测视场中是唯一的,否则,将提示视场中存在多个棱镜的错误。
2.2 控制程序设计需解决的问题
根据上述全站仪寻找目标点的要求,需要开发控制全站仪进行自动测量的程序,以保证自动测量过程的正常进行,为此需解决以下关键问题。
1)全站仪的观测视场中不能存在多个棱镜。对于TCA2003全站仪来说,正常视角为27'×27',这对于距离全站仪为100 m的2个点而言,该2点的距离不能小于0.79 m,一般情况下的基坑监测点能满足这个条件。如需要监测点密度很大,考虑利用全站仪的小视角功能,视角为 8'6″×8'6″。
2)起始位置的确定。用户指定全站仪视准轴的水平指向和垂直指向后,全站仪会自动将望远镜视准轴指向该方向,该方向就成为起始位置。
3)搜索范围的指定。到达起始位置后,自动全站仪会根据指定的搜索范围寻找棱镜。一般要求,该搜索范围内不能存在2个棱镜,否则还需要人工判断哪个是监测点,因此,搜索范围不能太大,一般不要超过全站仪的正常视角,但也不能太小,如果变形点的变形量较大而搜索范围较小,将找不到棱镜点。
4)整个监测系统中的测站点、监测点、基准点应在同一个监测坐标系中。在这个坐标系中,基准点是坐标系的已知点,测站点、监测点在监测坐标系中的概略坐标必须在自动测量前得到,否则全站仪在寻找棱镜点时就会变得盲目。全站仪架设好后,直接测量基准点,利用基准点进行坐标转换或后方交会,即可得到测站点的概略坐标。得到测站点的概略坐标后,对全站仪重新定向、定位到监测坐标系中,然后再测量变形监测点在监测坐标系中的坐标。由于监测点的变化只受变形的影响,所以作为自动测量寻找目标用的概略坐标,只在第1期测量前测量1次即可(本次测量称为预先测量),以后各期测量用的概略坐标直接采用前一期的坐标结果。
5)自动测量过程必须实现测量结果是否合限、是否重测的自动判断,目标被遮挡后的处理等。自动测量过程必须可以人工干预,可以使自动测量过程暂停、继续、终止等。
6)TCA2003和TS30程序开发所用的GEOCOM,部分程序控制指令不通用,所以不用直接移植。目前TCA2003已经停产,TS30作为新一代的仪器,程序不通用带来一定的麻烦,考虑到目前很多单位依旧在使用TCA2003,所以开发2套程序是很有必要的。
7)自动监测程序中使用COM_OpenConnection()命令进行通讯端口、波特率、返回值的设置,使测量机器人与计算机联机,从而实现测量机器监测的自动控制。
2.3 自动控制程序的流程
根据全站仪的性能及基坑测量环境,自动监测的控制流程可以按图2所示的框图进行。一周期测量时,基准点与监测点一起测量,然后采用非固定站差分[6]或坐标转换的方法求监测点在监测坐标系下的三维坐标。
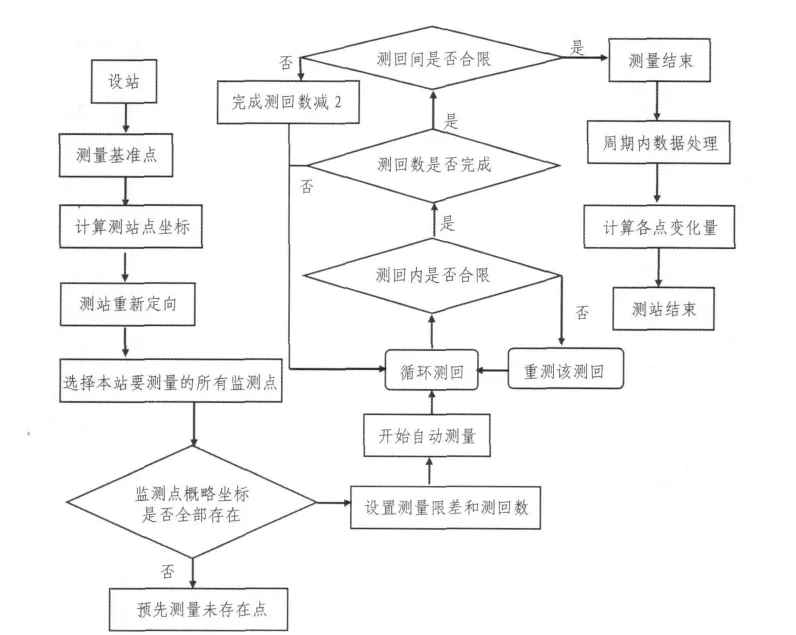
图2 自动测量控制流程框图Fig.2 Flowchart of automatic monitoring control
2.4 基于测量机器人的监测系统的构成
基于测量机器人的基坑围护结构自动监测系统硬件包括自动全站仪、1~2 m通讯电缆 (具有蓝牙设备的全站仪可以采用蓝牙通讯)和控制器 (便携笔记本、PDA、智能手机等)。系统软件为整个系统的核心,软件的功能主要有文件管理、数据采集、数据管理、数据处理等。其中,数据采集部分包括仪器初始化、点位学习、观测点组设置、测量限差及其他参数设置、自动测量等功能;数据管理采用数据库管理,变形量的word格式自动报表输出,各监测点位移曲线的图形显示等。
2.5 监测系统软件
基于测量机器人的基坑围护结构自动监测系统软件部分采用按钮界面,相对于菜单界面,按钮界面更加简明扼要、一目了然,测量、定向、数据采集、数据分析、换页等主要监测功能都在主界面上,可以进行触摸屏操作,次界面等采用属性页进行命令响应,数据处理结果采用图形显示和word报表输出。采用VC++6.0语言编程,通过GeoCOM和自动全站仪进行数据通讯和指令操作[7]。通过RS232串口使计算机和全站仪进行联接,目前计算机也可以采用USB接口模式,波特率等参数要设置一致。
3 测量误差分析
测量误差主要有以下来源。
1)仪器的系统误差。主要由仪器本身构造引起的。在测量前对仪器进行检校,检校后的仪器残余系统误差一般会在两周期位移值计算后基本消除。
2)测站点、目标点的对中误差。由于基准点、监测点在整个监测期间采用强制对中固定,对中误差可忽略不计。测站点位置是通过基准点计算得到的,与对中误差无关。
3)外界环境的影响。一般来说,基坑的监测范围较小,基准点、监测点的气象条件基本相同,采用差分方法或加尺度因子的坐标转换可以减弱气象因素变化的影响。另外,在自动测量开始前后各测量一次气象元素,取平均后对测距进行一次改正。经过这些措施后,外界环境的影响基本可以消除。
4)测量误差的影响。由于TCA2003全站仪观测精度较高,测角精度为0.5″,测距精度为1 mm+1×10-6m,在200 m范围内其点位测量的精度达到0.1 mm。
通过以上分析可以看出,误差来源对监测点点位测量影响并不显著,一般极坐标测量3个测回即可满足精度要求[8]。通过基准点坐标转换求取监测点在监测坐标系下的坐标时,基准点的图形结构是影响监测点点位精度的一个重要方面。一般要求基准点要均匀地分布在基坑的外围(见图1),避免所有的基准点只位于某一侧或近似一个方向。
4 实际工程应用
利用基坑围护结构自动监测系统对广州某项目开挖的监测工程进行了几个月的位移监测,图3为第2断面各点的位移曲线图。从图中可以看出,上部的D1-1、D1-2、D2-1、D2-2位移量最大,除因为基坑二次取土造成变化较快的一段时间,D2-2稍比D2-1位移量大以外,2点其他时间的位移量基本相同,2断面的整体位移趋势也基本一致。监测结果正确地反映了基坑的位移情况,出现位移变化较快时,测量人员及时报警,通过及时采取有效措施控制了险情,确保了基坑安全和正常施工。
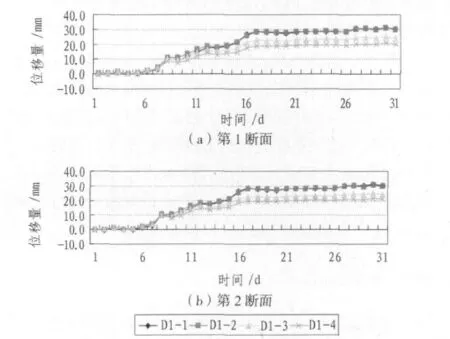
图3 第1,2断面各点位移曲线图Fig.3 Curves of displacement
一般情况下,以顶部水平位移观测点10个,不同深度水平位移测斜孔10个为例,对采用常规的人工监测与自动监测系统的监测效率进行比较,如表1所示。

表1 人工监测与测量机器人自动监测系统监测效率对比表Table 1 Comparison and contrast between monitoring by labor and monitoring by robot total station in terms of monitoring efficiency
从表1可以看出:传统监测方法,先进行外业测量,后进行内业处理,再做出成果,画出变形位移图,工作效率较低,工作1个循环,至少要花费3 h。相比传统的测量方法,测量机器人能全自动、高精度,在几min就可以完成1个循环,可以动态地、及时地、全天候地连续监测,尤其是数据达到报警值或遇到紧急情况需要连续监测时,测量机器人就更有优势。相比传统的监测方法,测量机器人系统可能只要1人或2人就可以完成任务,节约成本在70%以上。
5 结论与讨论
基于测量机器人的深基坑监测系统把测量人员从繁重的重复精确瞄准的任务中解脱出来,实现了基坑监测的高精度、自动化,同时也提高了基坑监测的时效性,有利于组成监测分析、信息反馈及变形预报的自动化和一体化系统,以实现信息化施工中能及时准确可靠地提供基坑监测的信息。该监测系统在深基坑围护监测中操作方法简单,仅需3~5个基准点,监测点采用加保护罩的螺丝基座加小棱镜,自动化监测、自动化数据处理和输出可以减少工作量,提高工作效率,也有利于监测点的保护,不仅可以做为一种可行的监测手段在基坑开始监测时采用,也可以在测斜管遭到破坏后做为一种替补方法采用。
此监测系统使测量机器人的自动监测从操作环境简单的大坝或运营隧道监测成功地运用在操作环境较复杂的深基坑自动监测中。但是,目前仅仅是测量机器人的深基坑监测系统,主要是使用VC++和GeoCOM语言开发的自动监测、自动处理数据和输出各种报表的软件。今后还要在操作方便上做进一步的深入研究,如测量机器人监测系统的人机无线传输,基于互联网的操作和控制,结合工业计算机和WIN8操作系统支持触摸屏操作,结合AUTOLISP对其监测点位和断面进行三维自动成图、自动数据、图形分析和处理等。
[1] 姚黔贵.城市深基坑变形监测的实施[J].贵州工业大学学报:自然科学版,2005,(34)2:96 -99.(YAO Qiangui.Execution study of deformation survey of urban deep pit[J].Journal of Guizhou University of Technology:Natural Science Edition,2005,(34)2:96 -99.(in Chinese))
[2] 李瑞杰.地铁工程深基坑施工监测技术应用[J].铁道建筑,2010(5):53-55.
[3] 戈修忠.深基坑工程监测技术分析[J].淮海工学院学报:自然科学版,2009,18(2):65 -68.(GE Xiuzhong.Analysis of monitoring technology of deep excavation engineering[J].Journal of Huaihai Institute of Technology:Natural Sciences Edition,2009,18(2):65 -68.(in Chinese))
[4] 詹美斌,马原平.TCA2003测量机器人在大坝监测中的应用[J].西部探矿工程,2005(S1):145-146.
[5] 郑立常,卫建东,郑俊锋,等.基坑施工对临近运营地铁隧道影响监测的实践[J].测绘工程,2007(2):47-50.(ZHENG Lichang,WEI Jiandong,ZHENG Junfeng,et al.The practice of deformation monitoring of Metro tunnel influenced by the construction of adjacent foundation pit[J].Engineering of Surveying and Mapping,2007(2):47 -50.(in Chinese))
[6] 李会青,张伟.非固定站差分法在深基坑监测中的应用[J].工程勘察,2003(2):59 - 61.(LI Huiqing,ZHANG Wei.Application of difference Method by non-fixed total station in deep pit monitoring[J].Geotechnical Investigation and Surveying,2003(2):59 -61.(in Chinese))
[7] 杨健健,饶国和,徐昌,等.测量机器人GeoCOM接口技术的开发与应用[J].水电自动化与大坝监测,2008,32(1):72 -74.(YANG Jianjian,RAO Guohe,XU Chang,et al.Development and application of georobot GeoCOM technology[J].Hydropower Automation and Dam Monitoring,2008,32(1):72 -74.(in Chinese))
[8] 郝传才.地铁基坑水平位移监测精度分析[J].广东建材,2006(10):89-91.