基于非差观测的网络实时动态定位方法及其在连续运行基准站跨网服务中的应用
2011-11-04唐卫明葛茂荣刘经南
邹 璇,唐卫明,葛茂荣,刘经南
1.武汉大学卫星导航定位技术研究中心,湖北武汉430079;2.德国地学研究中心,A1714473 Potsdam,德国
基于非差观测的网络实时动态定位方法及其在连续运行基准站跨网服务中的应用
邹 璇1,唐卫明1,葛茂荣2,刘经南1
1.武汉大学卫星导航定位技术研究中心,湖北武汉430079;2.德国地学研究中心,A1714473 Potsdam,德国
基于非差观测的网络实时动态定位(RTK)方法通过提供每颗卫星的误差改正量,使网内用户获得与网络RTK方法等价的快速精密单点定位服务。当用户跨越连续运行基准站(CORS)网内由不同参考站组成的子网(参考子网)甚至跨越不同CORS网时,都能有效避免因所选取的主参考站变化而引起的模糊度重新初始化,从而保持观测时段内用户定位结果的连续可靠和跨CORS网服务时算法上的无缝衔接。通过对海上实测动态数据处理结果的分析,验证该方法的定位精度、初始化时间与现有网络RTK方法在量级上的一致性,以及跨不同参考子网和CORS网时实现无缝衔接的有效性。
全球导航卫星系统;非差改正数;网络实时动态定位;无缝衔接
1 引 言
网络RTK又称多参考站RTK,是近年来在常规RTK、Internet、无线通信、计算机网络管理等技术基础上发展起来的新一代实时动态定位新技术[1]。国内外已有很多学者对网络RTK定位方法进行了大量的研究,并取得了一系列研究成果。目前的各种方法主要是基于CORS网提出,按照对网络RTK方法研究的逐步深入,大致可以分为三个阶段。基于差分观测的网络RTK方法自20世纪90年代中期提出以来,经过十多年的发展,目前应用得最为广泛。该方法基于各类误差在测站间存在的较强线性相关性,利用双差观测值残差对指定卫星进行建模,用户在模型改正后采用相对定位模式与参考站数据联合解算。HiRIM方法由 Christian Rocken于2000年提出,该方法虽然实现了对每颗卫星的非差改正数分别建模,但用户仍需采用相对定位模式进行数据处理[2]。文献[3]的基于非差观测的网络RTK方法不但对每颗卫星的非差改正数分别进行建模,而且能够为网内用户提供与以上相对定位模式网络RTK方法等价并且精度一致的快速精密单点定位服务[3]。
2 基于非差观测的网络 RTK方法
基于非差观测的网络RTK方法简单介绍如下:首先利用现有的相对定位数据处理策略解算得到参考站间双差模糊度及对应的载波相位双差观测值残差。由双差模糊度转换为对应非差模糊度的转换矩阵是秩亏的,此时通过适当指定某些具有整数特性的非差模糊度,可将双差观测值残差转化为各参考站与可视卫星间非差观测值残差的形式,所指定的非差模糊度为任意整数,不会影响模型构建结果的有效性。与传统单层模型和Klobuchar模型等对整个地球表面进行建模相比,该方法是利用参考站实测数据对每颗可视卫星在地面处分别建模,模型在构建时类似于一个以卫星为顶点、各参考站子网为底面的倒棱锥形,只是对卫星方向的一小块区域进行建模,这一建模思想可以有效模型化局部范围内的电离层和对流层扰动。由于对每颗卫星方向的电离层、对流层以及与卫星相关的硬件延迟、钟差、轨道误差都被精确构建到误差改正模型中,且模型在构建时保留了模糊度的整数特性,因此网内用户可在接收到周边参考站发播的误差改正信息后,根据其测站近似坐标计算得到每颗卫星的误差量并对其观测值进行改正。用户接收机包含的硬件延迟无法通过模型改正的方式消除,但由于同一时刻不同卫星的观测值所受接收机硬件延迟是一致的,通过星间单差可消除该部分误差的影响,此时,模型改正后的用户站观测数据便可基于非差数据处理模式,采用星间单差模糊度固定的方法快速计算得到测站处的精密定位结果[1-2]。基于非差观测的网络RTK方法模型构建示意图如图1所示。
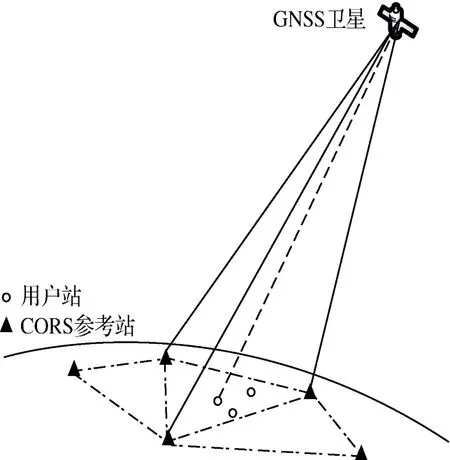
图1 基于非差观测的网络RTK方法模型构建示意图Fig.1 Method of network RTK based on undifferenced observation corrections
3 CORS跨网服务的无缝衔接
CORS跨网服务的无缝衔接包括所采用的数据处理算法、参考站坐标基准的统一、网内数据通信,以及CORS网间数据共享等问题,在此笔者仅从数据处理算法上对CORS跨网服务的无缝衔接问题进行论证分析。
传统网络RTK方法需选择一颗高度角较高的卫星作为参考卫星,并利用与参考卫星相关各卫星对的双差观测值残差进行建模。用户在按照传统网络RTK方法进行精密定位应用时需同步观测指定参考卫星,因此存在参考卫星的选取以及换星时误差改正信息的转换等问题。此外,由于用户需采用相对定位模式与邻近参考站或虚拟的参考站进行联测,当用户跨越由不同参考站组成的子网(参考子网)甚至跨越不同CORS网时,将不可避免地存在模糊度重新初始化的问题。
基于非差观测的网络RTK方法可以有效解决传统网络RTK方法存在的以上技术缺陷。由于基于非差观测的网络RTK方法是对每颗可视卫星分别建模,且采用非差模式固定星间单差模糊度,因此用户在进行定位时无需指定参考卫星和主参考站。当用户跨越不同CORS子网时,该方法能有效避免传统网络RTK方法因所选取的主参考站变化而引起的模糊度重新初始化,从而保持观测时段内用户定位结果的连续可靠和跨CORS网服务时算法上的无缝衔接。
4 算例分析
笔者在武汉大学 GNSS工程技术研究中心自主研制的导航数据综合处理软件(position and navigation data analyst,PANDA)的基础上[4],实现了基于非差观测的网络RTK方法。以下通过对一组海上实测动态算例处理结果的分析,验证该方法在初始化时间、定位精度与现有网络RTK方法在量级上的一致性,以及CORS跨网服务时实现算法上无缝衔接的有效性。
4.1 固定基线长度相对检测方法
由于在本文算例CORS系统覆盖的海域上,难以找到静止不动的静态检测点或距离较近的参考站进行短基线相对定位,只能比较流动站间的相对位置关系,因此采用固定基线长度相对检测方法评判流动站用户的定位精度。
固定基线长度相对检测方法是在一个运动载体上架设两台或两台以上用户接收机来检测用户的定位精度,定位结果可被转换为用户接收机间的相对位置关系,通过将解算得到的相对关系与实际存在的相对关系进行比较,可以在一定程度上反映用户接收机的定位精度。在进行固定基线长度相对检测时,两台接收机之间的相距位置一般都在几米到几十米,测量环境一致,而且所用的两台接收机为同一型号,仪器测量精度也一致。因此,可以认为每台接收机绝对定位精度一致,由用户定位精度表示的基线长度的中误差[3]为式中,σs为基线长度的中误差;σ为用户定位的点位中误差。

4.2 算例说明
笔者选取了2010-08-31某CORS网从上午11:15开始共2 h 15 min、数据采样率为1 s的一组海上实测动态观测数据进行了测试分析。该组数据由4个CORS参考站和2个用户流动站组成,4个参考站的平均站间距离为185 km,组成了相邻的2个三角子网。海上动态用户精度测试时,船尾左右分别架设1台拓普康 GNSS双频接收机,2台接收机之间的基线长度为9.546 m。船只行进过程中虽然受到海水、风等的压力可能产生变形,但是形变量最大仅为毫米级,因此认为在船只行进过程中流动站间基线长度保持不变。测试时,船只从参考站1附近出发,沿着参考站1—2基线方向航行,跨越了2组CORS三角子网,当船只在△134内时仅采用由参考站1、3、4获得的误差改正信息,当船只在△123内时仅采用由参考站1、2、3获得的误差改正信息,所采用的两组误差改正信息在参考站1、3的连线处进行切换,船只航行总距离约为62 km。按照基于非差观测的网络RTK方法同时对船尾2点进行星间单差宽巷(LW)模糊度固定快速精密单点定位,通过同步的2点位置解算结果反算站间距离,与真值比较从而得到实际观测的基线长度差值,然后根据式(1)得到 GNSS动态用户定位结果的中误差。海上动态测试设备舱面布设、CORS网位置分布以及流动站轨迹如图2所示。
本算例采用事后处理模式仿真实时动态定位过程,以便对未来建立基于非差观测的网络RTK系统时用户实时定位精度,以及区域网络 RTK用户在跨越由不同参考站组成的子网时在算法上无缝衔接的可行性进行有效的模拟分析。对全部GNSS观测数据均按照 TurboEdit算法进行预处理[5],并结合残差分析的方法探测、标注可能的周跳和粗差观测值。参考网采用后处理的方式计算得到全部双差模糊度信息,按照基于非差观测的网络RTK方法进行实时模型构建。
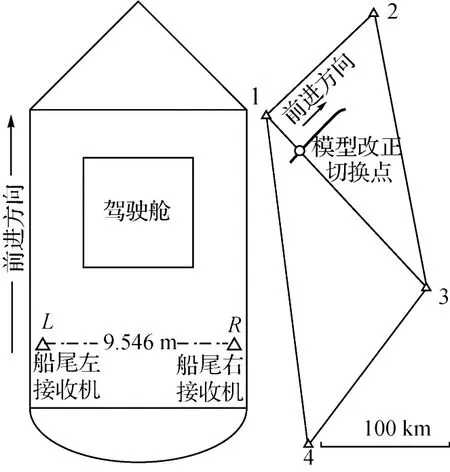
图2 海上动态测试设备舱面布置、CORS网位置分布、流动站运动轨迹示意图Fig.2 Equipments layout of dynamic testing,distribution ofCORS network,and thetrajectory of rover
4.3 用户定位结果分析
图3表示在船只行进过程中,采用基于非差观测的网络RTK方法,由两台 GNSS接收机逐历元定位结果反算所得基线长度与实际基线长度的差值序列。从图中可以看到,经过约9 min的初始化后,船尾两台接收机的宽巷模糊度均得到有效固定(其中船尾左侧接收机耗时245 s,船尾右侧接收机耗时475 s),此时利用2个流动站同步观测所得定位结果可以计算得到厘米级精度的基线长。如图3所示,在总共2 h 15 min的观测时段中,除了最初的模糊度初始化过程,船尾左侧和右侧接收机还分别出现了一次为期218 s和192 s的模糊度未固定观测时段,这可能是由于本文采用的模糊度固定算法尚不完善所致。结合表1的统计结果可知,所得基线长度的差值绝大部分优于5 cm,RMS仅为4.13 cm。由基线长度中误差与用户定位结果中误差的转换公式(1)可以得到,一旦模糊度有效固定后,用户动态定位结果中误差为±5.06 cm。由于以上数据处理过程中是对星间单差观测值的宽巷模糊度进行固定,如能以此为基础进一步固定L1模糊度,进而实现LC观测值的星间单差模糊度固定,可以预期获得用户定位精度的进一步提升。通过以上对用户定位结果的测试分析,验证了如下结论:按照基于非差观测的网络RTK方法,可以得到与现有网络RTK方法相一致的定位精度。
如图2所示,对于本文选取的该组海上动态观测算例,船只在总共2 h 15 min的航行过程中跨越了2个CORS三角子网。在本次试验分析中,船只进入新的CORS子网时将自动切换所采用的模型改正信息,模型改正的切换点分别在图2用圆点以及图3用竖线条进行了标识,从图3的基线长度差值计算结果可以发现,船尾左右两侧接收机的星间单差模糊度固定结果在进行误差改正信息自动切换前后保持一致,并未出现常规网络RTK方法在跨越不同CORS子网时因所选取主参考站变化而引起的模糊度重新初始化问题。这一测试结果进一步验证了按照基于非差观测的网络RTK方法实现CORS跨网服务时算法上无缝衔接的可行性。
此外,基于该方法在非差模式下实现网络RTK技术的特点,使区域网络RTK与广域精密定位技术的统一成为可能。
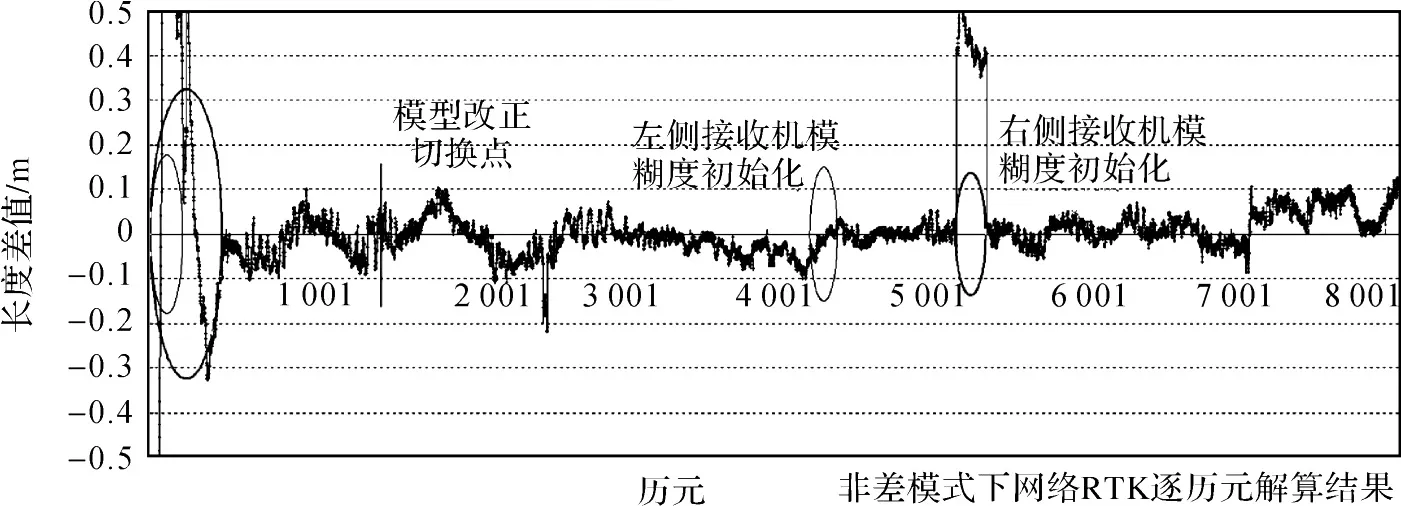
图3 动态测站间定位结果与基线长精密测定值的差值(采样间隔:1 s)Fig.3 Baseline measurement results of dynamic position(observation interval:1 s)

表1 基于非差观测的网络RTK方法定位基线长度差值精度统计Tab.1 Statistic of the accuracy of baseline length
5 结束语
在统一CORS网坐标基准,且暂不考虑网内数据通信和共享等问题的前提下,按照基于非差观测的网络 RTK方法,可将全国现有区域性CORS网有效地连接成一个整体,用户的定位精度仅与所处的参考子网站间的距离相关,当用户跨越CORS网内由不同参考站组成的子网甚至跨越不同CORS网时,该方法能有效避免因所选取的主参考站变化而引起的模糊度重新初始化,从而可以在算法上形成一套统一且无缝衔接的CORS网服务系统。此外,基于该方法在非差模式下实现网络 RTK技术的特点,使区域网络RTK与广域精密定位技术的统一成为可能。
[1] TANG Weiming.Research on Techniques of Large Area and Long RangeGNSS Network RTK and Developing Network RTK Software[D].Wuhan University,2006.(唐卫明.大范围长距离 GNSS网络RTK技术研究及软件实现[D].武汉:武汉大学,2006.)
[2] ZOU Xuan.Study on GNSS Precise Point Positioning with Single-frequency Receiver[D].Wuhan University,2010.(邹璇.GNSS单频接收机精密点定位统一性方法的研究[D].武汉:武汉大学,2010.)
[3] Ge M R,ZOU X,DICK G,et al.An Alternative Network RTK ApproachBased On Undifferenced Observation Corrections[C]∥Proceedings of ION GNSS.Portland,Oregon:ION,2010.
[4] LIU J N,GE M R.PANDA Software and Its Preliminary Result of Positioning and Orbit Determination[J].Wuhan University Journal of Natural Sciences,2003,8(2):603-609.
[5] BLEWITT G.An Automatic Editing Algorithm for GPS Data[J].Geophysical Research Letters,1990,17(3):199-202.
[6] GAO Y,LIU Z Z.Precise Ionosphere Modeling Using RegionalGPS Network Data[J].Journalof Global Positioning Systems,2002,1(1):18-24.
[7] ROCKEN C,JAMES M.JOHNSON,et al.Improving GPS Surveying With Modeled Ionospheric Corrections[J].Geophysical Research Letters,2000,27(3):3821-3824.
[8] GAO Xingwei.The Algorithmic Research of GPS/GLONASS Network RTK and ItsProgram Realization[D].Wuhan University,2002.(高星伟.GPS/GLONASS网络RTK算法研究与程序实现[D].武汉:武汉大学,2002.)
[9] GAO Xingwei,CHEN Ruizhi,ZHAO Chunmei.A Network RTK Algorithm and Its Test[J].Geomatics and Information Science of Wuhan University,2009,34(11):1350-1353.(高星伟,陈锐志,赵春梅.网络RTK算法研究与实验[J],武汉大学学报:信息科学版,2009,34(11):1350-1353.)
[10] HUANG Dingfa,ZHOU Letao,LI Chenggang,et al.Strategy and ExperimentalResults ofAugmentation Reference Station Network RTK Positioning[J].Geomatics and Information Science of Wuhan University,2009,34(11):1344-1349.(黄丁发,周乐韬,李成钢,等.增强参考站网络RTK算法模型及其实验研究[J].武汉大学学报:信息科学版,2009,34(11):1344-1349.)
[11] LUO Xiaowen,OU Jikun.A New Approach for Fast Integer Ambiguity Resolution Suitable for Medium-long Baseline in GPS Network RTK[J].Geomatics and Information Science of Wuhan University,2007,32(2):156-159.(罗孝文,欧吉坤.中长基线 GPS网络 RTK模糊度快速解算的一种新方法[J].武汉大学学报:信息科学版,2007,32(2):156-159.)
[12] SHI Chuang,LOU Yidong,SONG Weiwei,et al.A Wide Area Real-time Differential GPS Prototype System and the Initial Results[J].Geomatics and Information Science of Wuhan University,2009,34(11):1271-1274.(施闯,楼益栋,宋伟伟,等.广域实时精密定位原型系统及初步结果[J].武汉大学学报:信息科学版,2009,34(11):1271-1274.)
[13] SHI Chuang,LI Min,LOU Yidong,et al.Near Real-time Orbit Determination of Navigation Satellite Using Regional Tracking Network[J]. Geomaticsand Information Science of Wuhan University,2008,33(7):697-700.(施闯,李敏,楼益栋,等.利用区域基准站进行导航卫星近实时精密定轨研究[J].武汉大学学报:信息科学版,2008,33(7):697-700.)
(责任编辑:杨洪泉)
Method of Network RTK Based on Undifferenced Observation Corrections and Its Functional Realization in Cross-CORS Service
ZOU Xuan1,TANG Weiming1,GE Maorong2,LIU Jingnan1
1.GNSS Research Center,Wuhan University,129 Luoyu Road,Wuhan 430079,China;2.Helmholz Centre Potsdam,German Research Centre for Geosciences(GFZ),Telegrafenberg,14473 Potsdam,Germany
Method of Network RTK based on undifferenced observation corrections allows clients to gain rapid and precise positioning service in undifferenced processing mode equivalent to Network RTK by providing error corrections of each satellite.Compared with current Network RTK,the new method could efficiently solve problems of ambiguity re-initialization caused by selected main reference stations change under circumstances of cross reference sub-networks within the same CORS network,or even cross different CORS networks,thus providing continuous and reliable positioning results for clients during observing session,as well as seamless link of Cross-CORS service.In addition,based on the characteristics of realizing Network RTK technology under the undifferenced processing mode,this new method makes the unification of regional Network RTK and wide-area undifferenced precise positioning technology possible.Through serial analysis of a practical example,this paper testifies the consistency in positioning accuracy,and initializing time of this new method and the current Network RTK,together with the efficiency of this method to provide seamless link of different reference sub-network and Cross-CORS service.
GNSS;undifferenced observation corrections;network RTK;seamless link
ZOU Xuan(1982—),male,PhD,assistant reasearch fellow,majors in regional network RTK and wide area PPP.
P228
:A
国家自然科学基金(41004014;41004003);高等学校学科创新引智计划(B07037);湖北省自然科学基金(2010CDA069)
1001-1595(2011)S-0001-05
2011-01-31
修回日期:2011-03-21
邹璇(1982—),男,博士,助理研究员,主要从事区域网络RTK和广域精密定位技术的研究。
E-mail:supermanzx1982@sina.com
