基于视觉的电子激光经纬仪空间点自动瞄准方法*
2011-10-19邾继贵叶声华
周 虎,邾继贵,叶声华
(天津大学精密测试技术及仪器国家重点实验室,天津 300072)
随着国民经济的快速发展和国家装备制造业水平的不断进步,作为空间大尺寸坐标测量设备,经纬仪系统以其非接触测量、转站方便、测量精度高等优点得到了日益广泛的使用。但传统的电子经纬仪系统依然存在诸如目标需要人为瞄准、工作强度大、效率低等不足,不利于工业现场的大批量作业[1-2]。近年来,各厂商相继开发出带有双轴马达驱动的激光经纬仪、电视经纬仪等新型经纬仪系统,以实现在一定条件下简化测量流程、提高系统测量效率的目的[3-5]。但由于马达运动误差的存在,使得以上系统在自动测量过程中经纬仪激光点很难精确瞄准被测目标,降低了测量精度;同时,受电视视场角的限制,在大空间范围内搜索目标存在一定的困难。若将图像处理和计算机视觉技术引入到经纬仪测量过程,利用外置可变焦摄像机构代替电视经纬仪对大范围空间目标点扫描成像,并对包含激光点的目标图像进行插值计算,可以在相同条件下获得更为精确的瞄准角度值,有助于提高系统测量速度,实现测量过程的自动化。
1 系统结构
激光经纬仪自动坐标测量系统由两台以上TM5100A电子激光经纬仪、外置摄像机构以及工作PC组成,如图1所示。TM5100A经纬仪是Leica公司推出的新一代电子经纬仪测量设备,采用了动态测角技术[6],水平测角和垂直测角合成标准不确定度可同时达到0.5″。与TM1800相比,该经纬仪增加了水平轴、俯仰轴驱动马达与可选的DL2激光器等机构。DL2激光器安装在经纬仪目镜端,其激光束出射方向与经纬仪视准轴共线,投射到物体表面的光斑中心即指示了经纬仪实际瞄准位置。
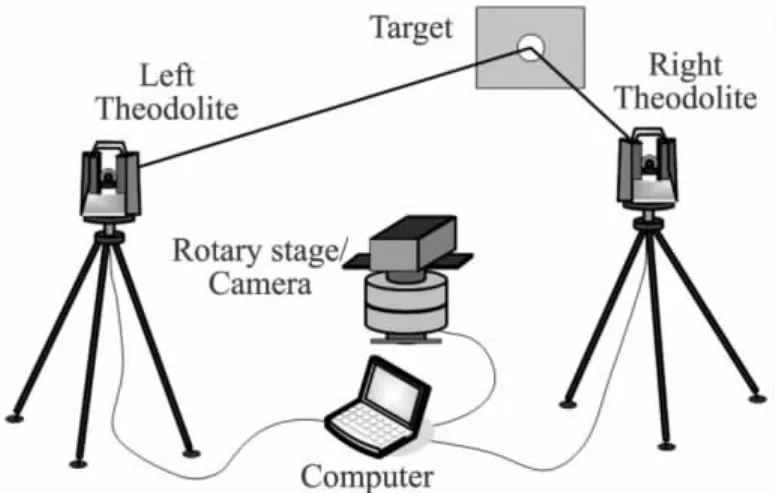
图1 测量系统结构示意图
外置摄像机构由二维旋转云台和固定于云台上的CCD摄像机/三可变镜头部分构成。云台可在工作空间内自由平移,使摄像机能够以接近正视的姿态瞄准被测目标。镜头处于广角模式时,云台带动摄像机沿水平/俯仰两个方向旋转,以实现大空间范围内的目标点扫描。当被测目标在视场中心成像后,利用极线法[7-8]等方法驱动经纬仪,可将激光点迅速移入摄像机视场。此时将镜头置于长焦模式,即可实现对目标点自动瞄准测量。重置镜头于广角模式,开始新的扫描,不断重复这一过程,直至完成全部测量任务。
2 插值瞄准方法
2.1 图像细分定位
图像定位精度是影响最终瞄准精度的因素之一。摄像机视场内目标点质心和激光光斑中心定位精度由CCD像素分辨率和测量分辨率共同决定。测量分辨率公式[9]:
式中Δu、Δv分别为CCD水平和垂直方向像素尺寸,k为摄像系统光学放大倍数。经纬仪瞄准目标点过程中,将镜头置于长焦模式可以显著提高镜头光学放大倍数,从而大幅度提高系统测量分辨率。
在光学细分的基础上对包含被测目标的局部原始图像利用自适应阈值分割[10],通过Sobel算子获得像素级别的边缘后,利用梯度法[11]将边缘定位至亚像素级别。对最终得到边缘点最小二乘拟合,可以获得较高的目标定位精度;激光光斑中心则采用加权质心法直接提取。
2.2 扫描线模型
设电子激光经纬仪以固定垂直角θ做小角度水平旋转,激光点投射到某一局部平面M对应的轨迹线为AB。以经纬仪处于初始扫描位置时视准轴在水平面的投影作为Z轴,Y轴竖直向下建立经纬仪坐标系OwXwYwZw,X轴由右手法则定义。OcXcYcZc为摄像机坐标系,N为理想像平面,令摄像系统光心在OwXwYwZw下的坐标为O0(x0,y0,z0)。由相机针孔模型[12]可知,面OcAB与N的交线CD即为摄像机观测到的激光点扫描轨迹线。小范围内用切平面代替经纬仪扫过的圆锥面,则可将AB近似于一条直线,如图2所示。
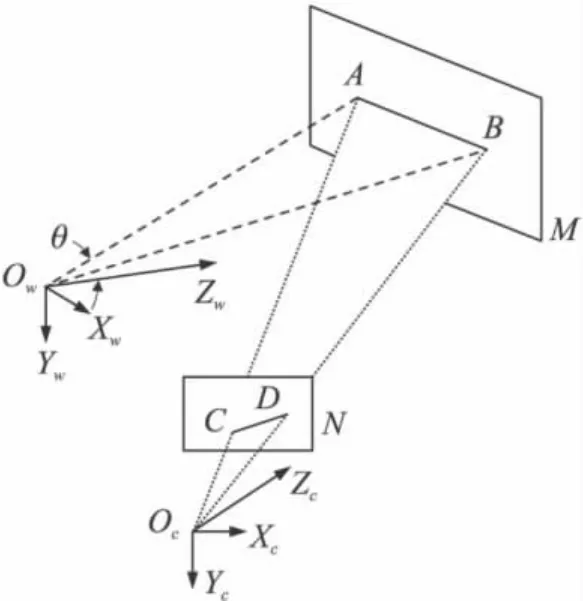
图2 经纬仪扫描线模型
设经纬仪坐标系OwXwYwZw中局部平面M方程为:

则直线AB方程可以表示为:

二维云台不存在绕光轴的旋转运动,可视像平面X轴方向始终保持水平状态,即 α=0。根据Kardan旋转公式,OwXwYwZw到像平面坐标系的旋转矩阵为:
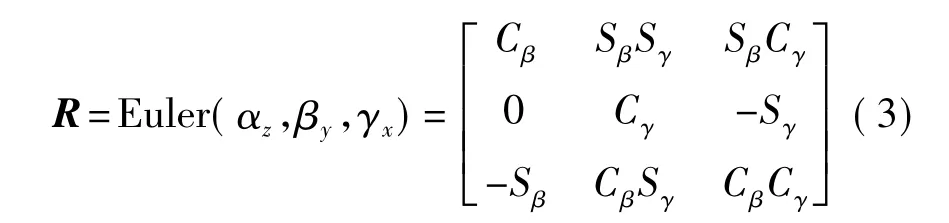
式中,α、β、γ分别为摄像机光轴沿坐标系OwXwYwZw的Z轴、Y轴、X轴的旋转角。直线AB上任意一点PM(xM,yM,zM)在像平面物理坐标系下的投影坐标PN(xN,yN)满足:
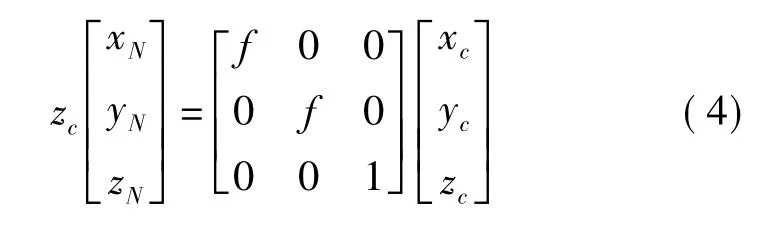
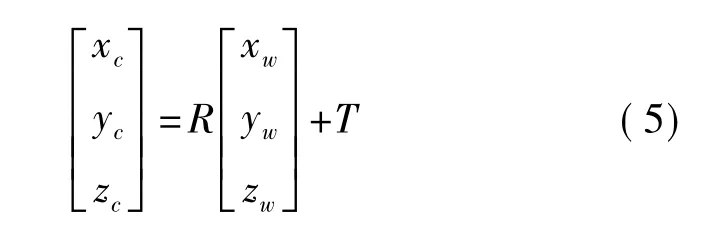
式中,[xcyczc]T为PM在OcXcYcZc下的坐标值。T为坐标系OwXwYwZw到OcXcYcZc的平移向量。摄像系统处于任一确定位置时,变量A1、B1、C1、D1、β、γ、f、O0均为定值。由式(1)~式(5),可求得像平面物理坐标系下直线CD的斜率:

其中K、φ1、φ2为由A1等定值计算得到的常数。设经纬仪以不同的垂直角θ和θ+Δθ扫过平面M,则两次水平扫描线的斜率偏差:
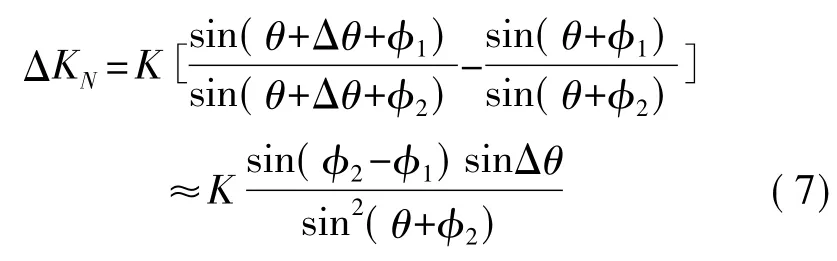
若局部平面与面OwXwYw间的二面角较小,且当 Δθ<0.01°时,ΔKN近似于 0。即当垂直角变化很小时,两条水平扫描轨迹线近似平行。同理,当水平角变化很小时,两条垂直扫描线也近似平行,可视为不同方向平行线组成的平行网格。
2.3 离散点插值
由以上分析可知,经纬仪小范围内单轴运动会引起图像中激光点质心同时沿像平面X轴、Y轴方向近似线性变化。即对应于任一个像素点,以下关系式成立:
其中,(uN,vN)表示像平面像素坐标系下经纬仪激光光斑质心坐标,x、y为相应的经纬仪水平角和垂直角。微动经纬仪,获得三组以上对应的(uN,vN)、(x,y)值作为控制点,即可利用最小二乘法求解6个系数a1、b1、c1、a2、b2、c2。
将上式改写为矩阵形式:
可得:
若用目标点质心坐标(uD,vD)替换式(10)中经纬仪激光光斑质心坐标(uN,vN),即可计算经纬仪精确瞄准该目标时对应的角度值。
3 实验
3.1 扫描线实验
距TM5100A经纬仪约5 m处放置一黑色平面,该平面与面OwXwYw、以及与摄像机像平面间的二面角均约为15°。驱动经纬仪以不同垂直角水平扫描该平面,扫描线对应的圆心角为0.6°,初始垂直角为75°,相邻扫描线间的垂直角增量为 Δθ=0.03°。表1为对9条激光点水平扫描线像素坐标采用等偏差最小二乘拟合求斜率的结果;表2为对9条激光点垂直扫描线像素坐标求斜率的结果,与表1类似,扫描线对应的圆心角为0.6°,相邻扫描线间的水平角增量为Δθ=0.03°。由表可知,经纬仪激光点以小增量同方向扫过平面时,扫描线近似平行。
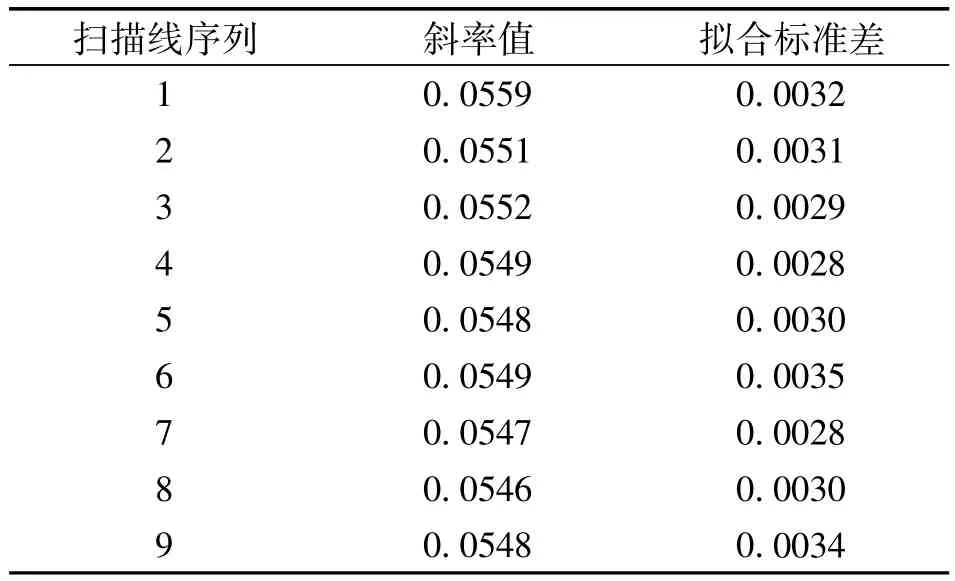
表1 水平扫描线斜率
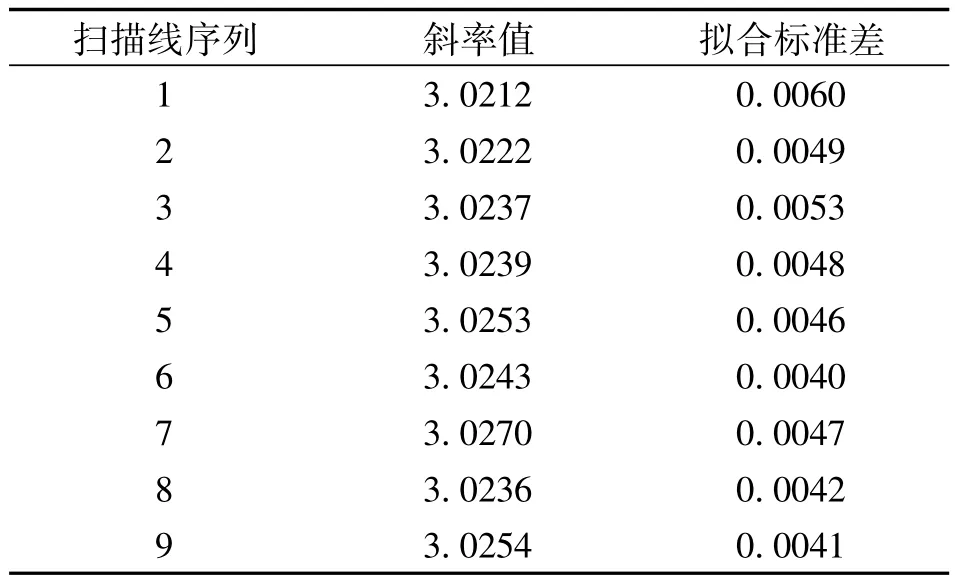
表2 垂直扫描线斜率
3.2 自动瞄准测量实验
利用中国计量院二基地标准长度基准进行测量精度验证,如图3所示,正六边形的六个顶点以及正六边形中心位置为基准墩位。墩位中心为沿垂直方向分布的标准螺柱,螺柱轴线间距离为经过测定的标准值。图4所示靶标通过标准转接件与螺柱配合,靶标质心过螺柱轴线。在T1、T2位置架设两台经纬仪,并将云台置于距靶标较近位置。摄像机扫描发现靶标后,即可将经纬仪激光点引入相机视场,由系统自动完成靶标质心的三维坐标测量。实际测得的靶标质心间水平距离与标准长度对比结果如表3所示。其中经纬仪基线距b=11 421.274 mm,高差h=57.695 mm,经纬仪距靶标的水平距离在15 m~25 m之间。由于测量GAW4、GAW1位置靶标时经纬仪观测角较大,故实际只采用了GA01、GAW2、GAW3、GAW5、GAW6间六组距离值数据进行对比。
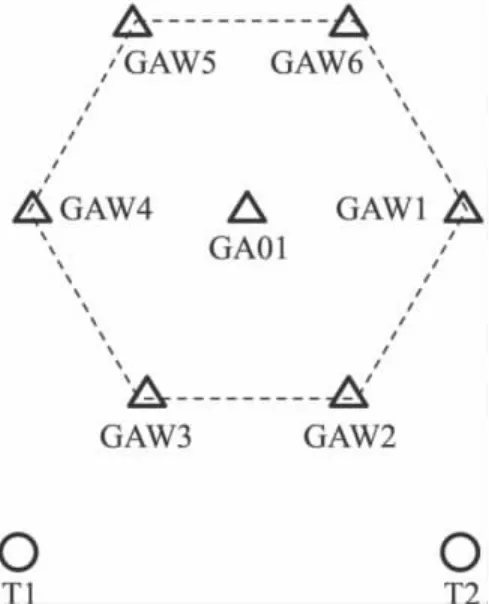
图3 现场基准布置

图4 转接件与靶标
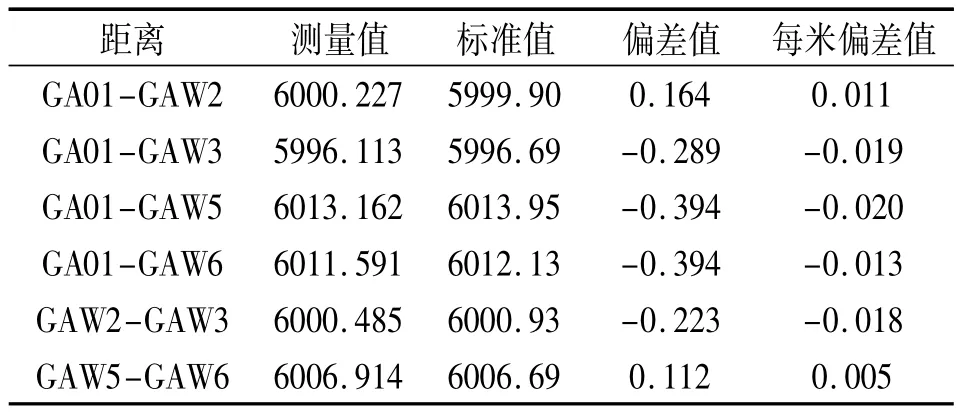
表3 测量结果与标准值对比 mm
由表3可知,与标准长度对比,几组数据的实际测量偏差均不超过±0.02 mm/m。
4 结论
实验数据表明,电子激光经纬仪自动瞄准目标过程中利用外置摄像系统在长焦模式下实现光学放大以提高目标定位精度,当经纬仪概略瞄准目标点后,再引入相关插值方法计算经纬仪实际瞄准位置,能够有效提高测量效率并保证系统精度。
以上插值过程均假设存在某一局部平面。如何将插值算法应用于非平面目标,实现快速有效的瞄准测量,是下一步要进行的工作。
[1]张滋黎,邾继贵,耿娜,等.双经纬仪三维坐标测量系统设计[J].传感技术学报,2010,23(5):660-664.
[2]马骊群,王立鼎,靳书元,等.工业大尺寸测量仪器的溯源现状及发展趋势[J].计测技术,2006,26(6):1-5.
[3]李清安,王厦,孙志远,等.基于电子经纬仪的双目CCD测量系统的标定研究[J].仪器仪表学报,2006,27(6):188-190.
[4]徐晶,杨华民,方明,等.CCD激光经纬仪自动跟踪算法及软件实现方案[J].兵工学报,2008,29(6):662-666.
[5]李广云.工业测量最新进展及应用[J].测绘工程,2001,10(2):36-40.
[6]尚超,王淦泉,陈桂林,等.基于经纬仪的感应同步器测角精度检测方法研究[J].传感技术学报,2008,21(5):865-868.
[7]Zhang Zili,Zhu Jigui,Ye Shenghua,et al.The Guidance Methodology of a New Automatic Guided Laser Theodolite System[C]//Proceedings of SPIE—The International Society for Optical Engineering,Beijing,China:SPIE,2008:71600R1-71600R8.
[8]Kalnen H,Reiterer A.Videotheodolite Measurement Systems-State of the Art[C]//ISPRS Commission V Symposium,Dresden,Germany:CRC PRESS,2006:142-146.
[9]李洪海,王敬东.摄像机标定技术研究[J].光学仪器,2007,29(4):7-12.
[10]王亮亮,王黎,高晓蓉,等.两种改进的局部阈值分割算法[J].现代电子技术,2009,32(14):78-80.
[11]刘立程.改进的基于形态学梯度法的车辆图像边缘检测方法[J].广东工业大学学报,2007,24(2):84-86.
[12]夏仁波,刘伟军,赵吉宾,等.基于圆形标志点的全自动相机标定方法[J].仪器仪表学报,2009,30(2):368-373.