高灵敏度谐振式微加速度传感器的设计与制作*
2011-10-19王军波商艳龙陈德勇
涂 晟,王军波,商艳龙,陈德勇
(中国科学院电子学研究所,传感器国家重点实验室,北京 100190)
加速度传感器是惯性导航和振动监测的核心元件之一。微机械加速度传感器因其低功耗、小尺寸、响应快、易集成、可批量生产等特点[1]而得到广泛的研究和应用。基于微机械加工技术的谐振式加速度传感器,由于其输出为谐振频率信号,易于与后端数字电路匹配组成高精度的微机电测控系统,与电压电流等模拟输出信号相比,其性能主要受其机械结构和材料性能影响,电漂移及噪声对测量精度影响较小,具有更强的抗干扰性。与传统的压阻式、电容式加速度传感器相比,谐振式加速度传感器具有动态范围宽、测试精度高、准数字输出、线性度好、抗干扰性强等优点。
谐振式微机械加速度传感器自上个世纪80年代出现以来,涌现出以石英、单晶硅、多晶硅、扩散硅、氮化硅(SiNx)等不同材料谐振器的微加速度传感器,其中,基于石英的微机械谐振式加速度器已得到导航级的应用[2]。硅基谐振式微机械加速度传感器采用MEMS工艺加工而成,与基于石英的传感器相比,在制作成本上有着不可比拟的巨大优势,因此受到了诸多研究者的青睐[3-13]。97 年 Roessig等人设计和制作了一种灵敏度为45 Hz/gn的双端音叉谐振式加速度传感器[3],06年通过表面微机械加工工艺,Susan X.P.Su等人提出的谐振式加速度传感器的灵敏度提高到 160 Hz/gn[5],09 年 Claudia Comi等人将灵敏度进一步提高到450 Hz/gn[13]。但是现有的硅基传感器较石英基传感器输出稳定性差、灵敏度低,制约着其在惯性导航与高精度制导等高端领域的应用。
本文提出一种新的硅基谐振式加速度传感器结构和制作工艺。相对于以往的采用杠杆结构作为力的放大装置并将惯性力耦合到谐振器上[7,12-13]的敏感机制,本文引入了一种新的敏感机制:加速度作用于器件时,质量块引起支撑梁弯曲形变,通过谐振梁截取支撑梁上表面应力情况来放大应力,以有效地提高传感器的灵敏度。为优化结构设计,本文建立了传感器工作的数学模型,进而在含浓硼扩散硅层的(100)硅片上采用体硅加工工艺制作器件,通过电磁激励、电磁检测,灵敏度可达1.989 2 kHz/gn。
1 结构设计与理论分析
1.1 结构设计
设计的微机械加速度传感器结构如图1所示。
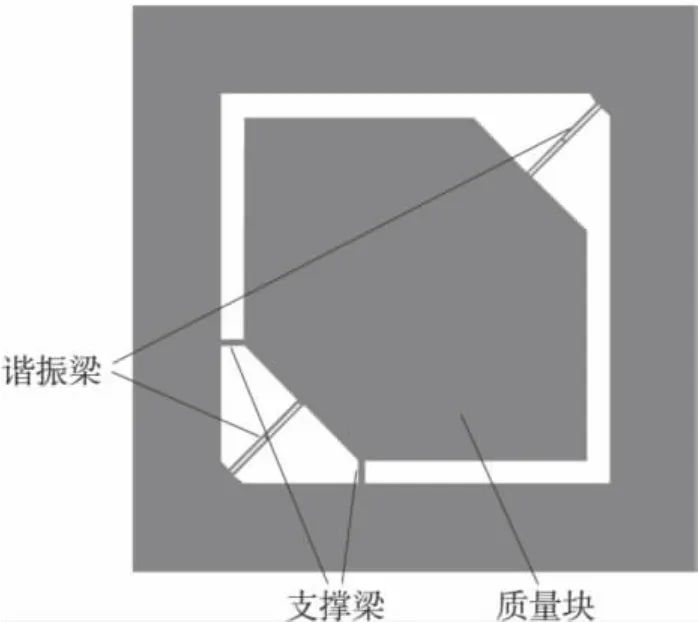
图1 加速度传感器整体结构
整个结构由一个支撑框架、一个质量块以及双端固支在质量块与框架之间的两根支撑梁及两组谐振器组成,结构参数如表1所示。谐振梁刚度小于支撑梁刚度,且谐振梁厚度小于支撑梁厚度,当质量块受加速度作用时,如图2所示,H形谐振梁截取支撑梁上表面应力,通过这种支撑梁与谐振梁厚度不同的特殊设计,加速度作用于质量块的惯性力转换为谐振梁的轴向应力并得到放大,提高了传感器的灵敏度。

表1 传感器整体结构参数
传感器采用电磁激励电磁拾振来检测谐振频率,外加永磁体在谐振梁周围提供一个均匀磁场,当H形梁激振电极上通过交变电流时,受安培力作用谐振梁作受迫振动,而拾振梁在激振梁带动下作同频振动切割磁场线,形成幅值与拾振梁振幅相关的拾振电流。当器件受垂直于器件平面的加速度作用时,谐振梁谐振频率随梁所受轴向应力而变化,通过检测其谐振频率变化即可得到待测加速度。
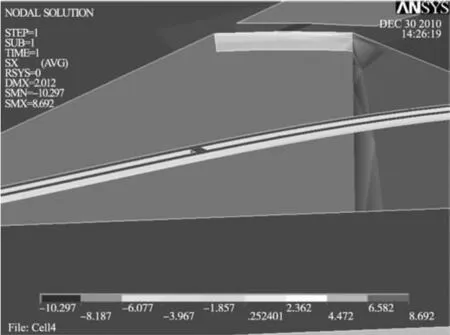
图2 支撑梁及谐振梁应力分布
1.2 理论分析
谐振器采用H形梁结构,其结构简图如图3所示。
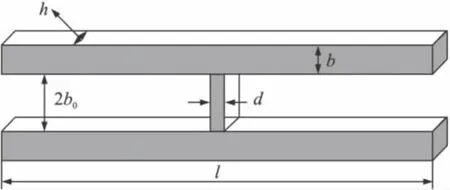
图3 H型谐振梁结构简图
谐振器一端连接质量块,一端连接支撑框架,可近似看作双端固支梁;其物理模型为伯努利-欧拉梁,在无阻尼下的微幅振动方程为[14]:

其中,ω(x,t)是谐振梁的动挠度方程,σ是梁所受到的轴向应力,A=2bh、I=bh3/6、E和ρ分别为谐振梁的横截面,梁的横截面相对于中心主轴的惯性矩,材料的弹性模量和材料的体密度。
解方程(1)可得,当σ=0梁的一阶振动模态的频率为:

当梁存在轴向应力,即σ≠0时,

如果用作用在梁上的作用力F来表示,那么可以表示成
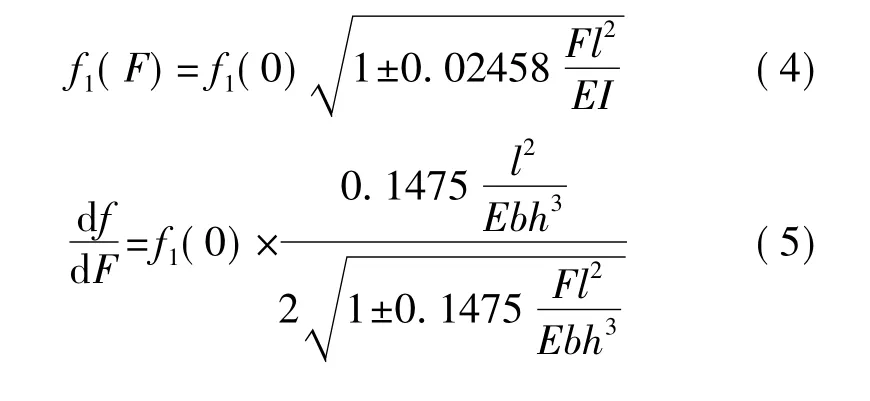

在加速度计中,梁所受到的轴向力可以表示为:
式中:C为惯性力的放大倍数,其大小与支撑梁的宽度、厚度相关,实际放大倍数为10.324 5,m为质量块的重量,a为加速度。

由式(2)可得:

上式即为H型谐振器加速度计的灵敏度表达公式。从上式可以看出,质量块质量、谐振梁宽度、谐振梁厚度是影响谐振器灵敏度的关键因素。
2 制作工艺
由于浓硼扩散硅高Q值及较好的热稳定性等特性,且其本身耐KOH溶液腐蚀,可形成腐蚀自停止层,本文选用浓硼扩散硅作为制作谐振器的材料以获得较好的器件性能,并简化制作工艺。
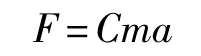
工艺流程如图4所示。首先在(100)单晶硅片表面扩散硼离子形成10 μm厚的扩散硅层,然后在扩散硅表面热氧化形成氧化层,再在其上LPCVD淀积氮化硅,形成绝缘层,如图4(a)、4(b)、4(c)所示;正面通过溅射和lift-off工艺得到电极图形,如图4(d);背面RIE刻蚀氧化层与氮化层,DRIE刻蚀体硅,并用KOH溶液湿法减薄,通过控制反应温度及腐蚀时间控制薄膜厚度约为50 μm(使得最后湿法释放谐振梁时支撑梁刚好是设计的厚度),如图4(e)、4(f);DRIE正面刻蚀氮化硅氧化硅及扩散硅层,刻蚀形成正面图形;最后KOH溶液湿法腐蚀体硅,释放梁结构并使支撑梁恰好为设计厚度,如图4(g)、4(h)。
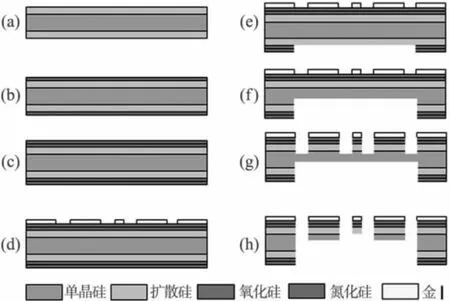
图4 加速度传感器制作工艺流程
利用扩散硅可作为腐蚀自停止层的特性及KOH溶液湿法腐蚀的各向异性,采用在(100)硅片上将支撑梁放置在<110>晶向上而将谐振梁放置在<100>晶向上的特殊布局,如图5(a)所示。当工艺最后一步用KOH溶液湿法腐蚀时,谐振梁宽度小且其位于<100>晶向上侧向腐蚀速度快,支撑梁宽度大且位于<110>晶向上,腐蚀过程中形成(111)面,KOH溶液在(111)晶面上腐蚀速度极慢可有效防止支撑梁被侧向腐蚀,当谐振梁扩散硅层下的硅被侧向腐蚀完全后支撑梁部位硅侧向腐蚀并不明显,而质量块与框架部位始终被氮化硅覆盖而不被腐蚀,从而实现制作支撑梁、谐振梁、质量块与框架这三种不同厚度的结构的目的。
采用上述工艺流程制作的加速度传感器芯片如图5(b)所示。其中支撑梁与谐振梁如图5(c)、图5(d)所示。从图5(c)、图5(d)可以看出,支撑梁厚度约为20 μm,谐振梁厚度约为10 μm,实现了设计目的。
图5
3 实验结果
采用HP4195A动态信号分析仪对传感器进行谐振器频率特性及Q值测试,激励信号50 mV,固有频率67.854 kHz,-3 dB 带宽147 Hz,空气中Q值为461.6,如图 6 所示。
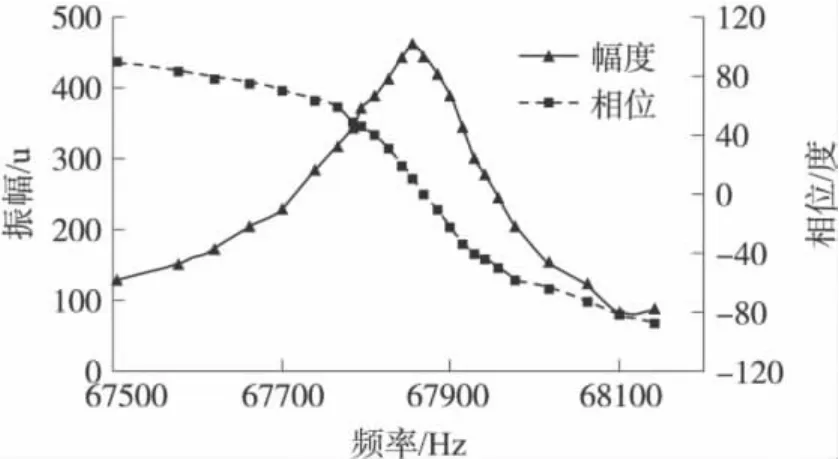
图6 谐振器幅频/相频特性曲线及Q值测试
重力场加速度易获得且精确度高,便于实验,因此本文采用重力场±1gn静态翻滚实验来测试传感器的灵敏度。通过水平仪和TP1-360W精密分度轴系装置(分辨率0.000 1°)来控制传感器与水平面夹角,通过四点测试法寻找加速度传感器的机械零位以消除零位误差。
在-1gn~1gn范围内,传感器灵敏度约为1.989 2 kHz/gn,测试曲线如图7所示。
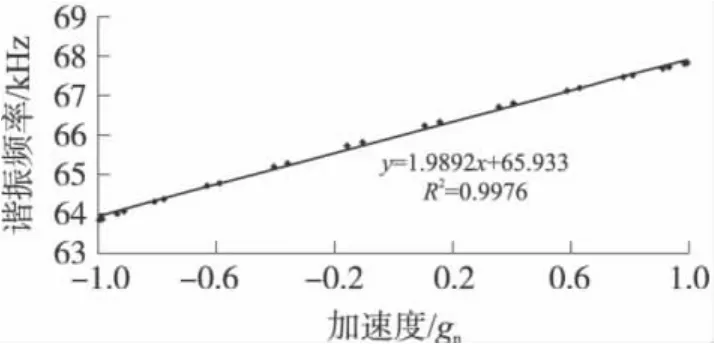
图7 加速度计灵敏度测试曲线
4 结论
为了改进谐振式加速度传感器的灵敏度特性,本文提出一种新的加速度敏感模式,通过质量块-支撑梁-谐振梁的特殊设计,将待测加速度转化为轴向应力并予以放大。应用这一原理提出了支撑梁与谐振梁不同厚度以放大应力的新结构。
采用浓硼扩散硅作谐振器简化了制作工艺,利用KOH溶液腐蚀体硅材料的各向异性和支撑梁谐振梁沿不同晶向放置的特殊布局,实现了谐振梁、支撑梁、质量块三者厚度不同的工艺设计目标。
器件性能测试表明,在-1gn~1gn的范围内传感器的灵敏度约为1.989 2 kHz/gn,在空气中谐振梁Q值约为461.6。
[1]顾英,赵连元.微硅加速度计技术综述[J].飞航导弹,2002,9:44-47.
[2]Norling B L.Superflex:a Synergitic Combination of Vibrating Beam and Quartz Flexure Accelerometer[J].Journal of Navigation,1988,34(4):337-353.
[3]Roessig T,Howe T,Pisano T,et al,Surface-Micromachined Resonant Accelerometer[C]//Proc Ninth International Conference on Solid-State Sensors and Actuators,Transducers’97,Chicago IL,USA,June 16-19,1997,859-862.
[4]Seshia A,Palaniapan M,Roessig T,et al,A Vacuum Packaged Surface Micro-Machined Resonant Accelerometer[J].Journal of Micro-Electro-Mechanical Systems,2002,11(6):784-793.
[5]Susan X P Su,Henry S Yang,Alice M Agogino.A Resonant Accelerometer with Two-Stage Micro-Leverage Mechanisms Fabricated by SOI-MEMS Technology[J].IEEE Sensors Journal,2005,5(6):1214-1223.
[6]Seok S,Seong S,Lee B.A High Performance Mixed Micro-Machined Differential Resonant Accelerometer[C]//Proc IEEE Sensors 2002,2002:1058-1063.
[7]Jia Yubin,Hao Yilong,Zhang Rong.Bulk Based Resonant Accelerometer[J].Chinese Journal of Semiconductors,2005,26(2):281-286.
[8]Ferrari V,Ghisla A,Marioli D,et al,Silicon Resonant Accelerometer with Electronic Compensation of Input-Output Cross-Talk[J].Sensors and Actuators,2005,A 123-124:258-266.
[9]Burrer C,Esteve J.A Novel Resonant Silicon Accelerometer in Bulk Micro-Maching Technology[J].Sensors and Actuators,1995,A 46-47:185-189.
[10]Burrer C.High-Precision BESOI-Based Resonant Accelerometer[J].Sensors and Actuators,1995,A 50:7-12.
[11]Burrer C,Esteve J,Lora-Tamayo E.Resonant Silicon Accelerometers in Bulk Micromachining Technology an Approach[J].Journal of Micro Electromechanical System,1996,5(2):122-130.
[12]Aikele M,Bauer K,Fieker W,et al,Resonant Accelerometer with Self-Test[J].Sensors and Actuators A,2001,92:161-167.
[13]Comi C,Corigliano A,Langfelder G,et al,A New Two-Beam Differential Resonant Micro Accelerometer[C]//Proceedings IEEE Sensors 2009 Conference,Christchurch,New Zealand,October 25-28,2009,158-163.
[14]徐芝纶.弹性力学(第三版).北京,高等教育出版社,1990.