妇科术后凝血用热极探头的温度控制系统设计
2011-10-19韦彩虹朱国忠陈裕泉
韦彩虹,雷 声,朱国忠,陈裕泉,潘 敏
(浙江大学生物传感器国家专业实验室生物医学工程教育部重点实验室生物医学工程系,杭州 310027)
热极即热探头(Heat Probe,HP),是一种微型的温控发热单元。热极治疗主要是利用高温热极头的热传导、热辐射作用和接触式压迫作用,使局部压迫出血的血管阻断血流,即机械压迫止血;导致靶组织脱水、凝固、灼烧乃至炭化、气化(热凝固封闭血管或者破坏增生组织,肿瘤组织),从而达到当即有效的治疗目的[2]。
自1978年美国Prote1[1]首次用热探头治疗消化道出血后,热极治疗在国内外已得到了广泛的临床应用[2-4]。热极主要与内窥镜配合用于消化道疾病(如胃溃疡、消化道出血、糜烂性胃炎等等),温度和外形体积要求高,目前,国内已有最高发热温度达250℃的热极治疗头[2]。然而,热极在其他方面的临床应用仍然很少,也尚未涉及到妇科领域。
利用热极的机械压迫止血特性[5],热极可以应用于妇科术后止血等领域,为此,本文设计了一个热极探头的温度控制系统,属于妇科手术使用的热极治疗设备的一部分,相对于消化道中使用的内镜热极,此热极对温度和外形体积要求相对较低。
本文设计的温度控制系统基于MSP430F149单片机,采用高精度薄膜铂电阻测温、分段设置PID参数的PID算法控制,具有温度设定、时间设定、实时温度显示、出错示警、过流保护等功能,系统工作温度和工作时间可调、精度高、灵活可靠。
1 原理与结构
热极探头外形同传统热极类似,为圆头柱状的不锈钢外罩,但体积要求相对较低,因此加热设备可采用功率和电压选择性大的加热管,使设计灵活性提高,同样也使系统的可控性增强。结构如图1所示。
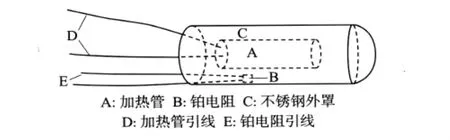
图1 热极外形结构
温度控制系统要实现的功能包括:工作温度设定(95℃ ~125℃),工作时间设定(1 min~15 min),热极头加热达到工作温度后,开始计时并保持温度,计时时间达到设定的工作时间后自动断流。具体工作原理如图2所示。
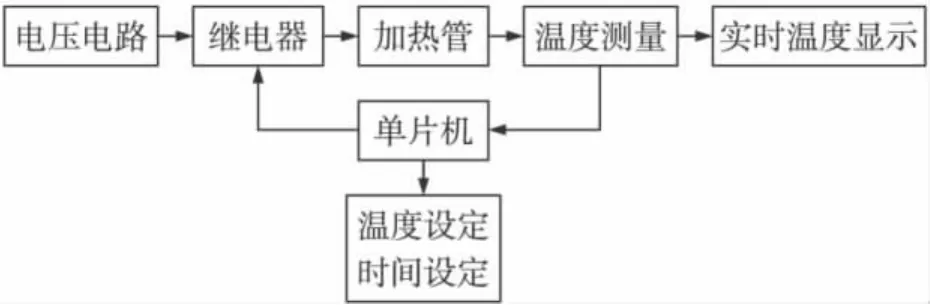
图2 热极工作原理图
2 硬件设计
硬件系统采用MSP430F149单片机[6-7]作为控制核心部件,高精度、响应快速的薄膜铂电阻作为测温元件,加热管作为加热元件,继电器作为加热电路通断控制器件。系统包括桥式测温电路[8-9]、仪用放大电路、单片机控制电路、温度和时间的设置电路、显示电路、电压转换电路、报警电路以及过流保护电路。
采集到的温度信号的精确与否直接影响整个系统的控制精度的高低,测温元件以及测温电路的选取非常重要。
选取测温元件时,一方面考虑到系统控制的目标温度为95℃ ~125℃,则测温元件测试温度的范围不能太低,而常用的一些数字温度传感器测温范围过小,无法胜任;另一方面考虑到大部分成品的模拟温度传感器体积较大,而且传感器中加入了信号的整合、稳定及处理等功能,可以得到较好的信号,但这势必会增加信号的延时时间。热极探头体积较小、对温度实时性要求较高,所以应选用体积小、延时时间少的传感器元件。因此,本系统选用了薄膜铂电阻作为测温元件。薄膜铂电阻是用真空沉积的薄膜技术把铂溅射在陶瓷基片上,膜厚在2 μm以内,用玻璃烧结料把Ni(或Pd)引线固定,经激光调阻制成薄膜元件,具有体积小、精度高、灵敏度高、稳定、热响应时间小、自热系数低等优点。
图3所示的系统采用的测温电路和放大电路。首先,铂电阻的工作电流是1 mA,0℃时阻值为100 Ω,则0℃时,铂电阻上的电压为100 Ω×1 mA=100 mV,这相当于一个基值电压。单片机A/D的参考电压是2.5 V,因此信号的放大倍数不可能很大。其次,温度从0℃变化到150℃,铂电阻的阻值线性地从100 Ω变到157.33 Ω,因此温度每变化1℃,铂电阻的阻值变化约为0.38 Ω,相应的电压变化为0.38 mV,这个变化量相对于基值电压而言是相当微小的。再次,电源存在一些微小的干扰,一般是毫伏级的,这些干扰极易把温度信号湮没。针对这些问题,为了得到更精确可靠的信号,提高控制精确,设计中采用了桥式电路。
放大电路采用了作为一级放大的仪用放大器和作为二级放大和低通滤波的运算放大电路。放大后的信号为0~2.5 V的电压信号,单片机A/D引脚可以直接采集并使用。
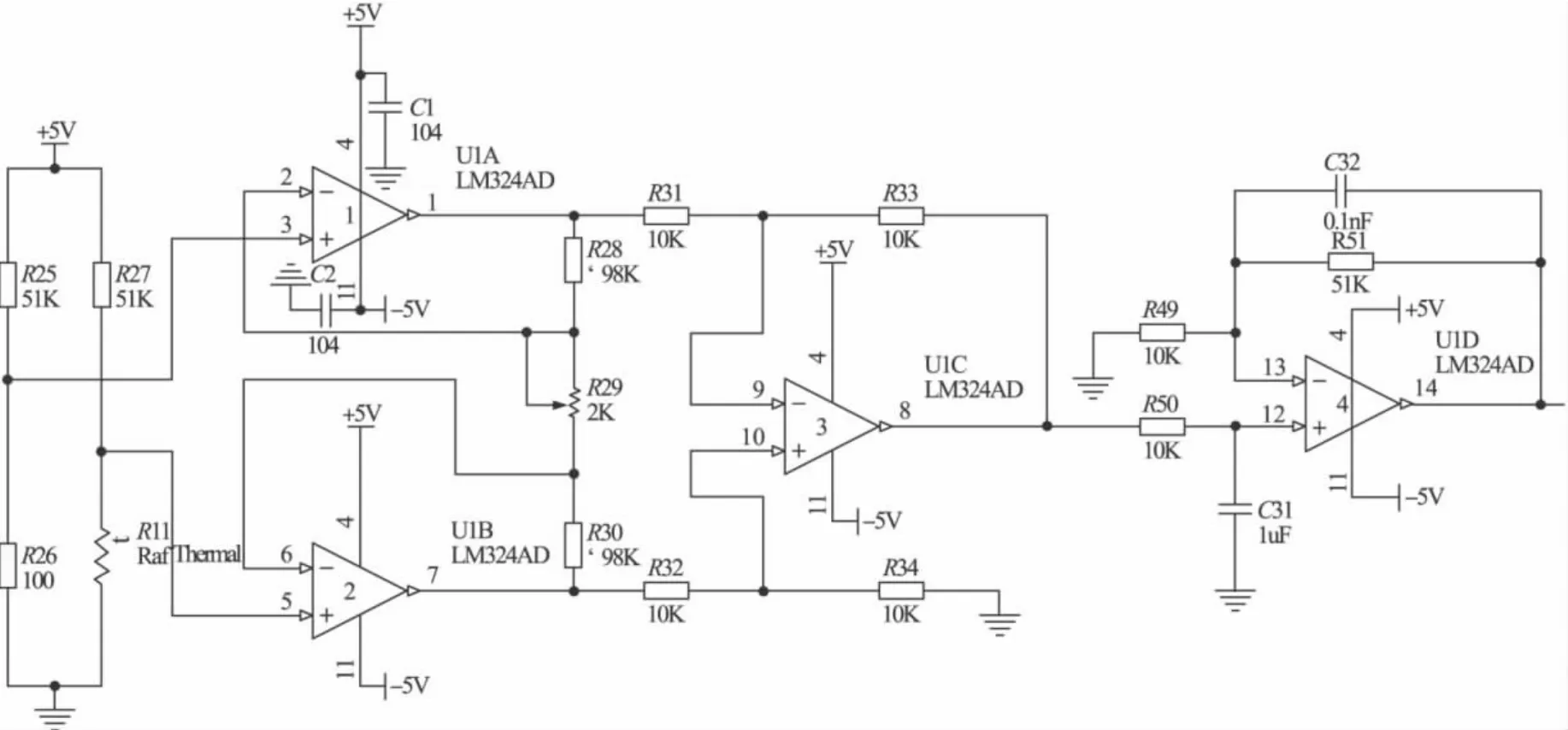
图3 测温电路图
3 软件设计
系统设计的软件流程图如图4所示,其中控制算法采用了PID算法[10-14],并根据加热管的实际应用情况,采用了分段设置PID参数的方法。
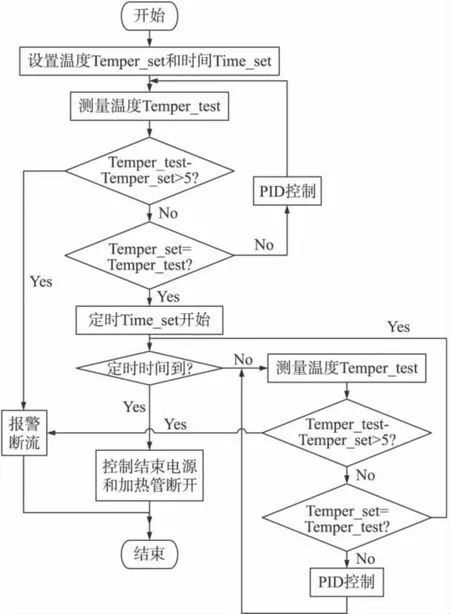
图4 软件流程图
3.1 PID算法原理
按反馈控制系统偏差的比例P、积分I和微分D规律进行控制的调节器称为PID调节器。模拟PID控制器系统框图如图5所示。图中,r(t)为设定值,y(t)为系统的输出值,两者之间的差值即为控制偏差e(t),

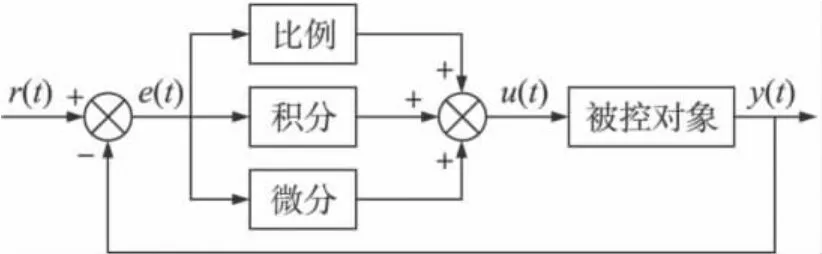
图5 PID控制系统框图
模拟PID控制以e(t)为输入,u(t)为输出控制被控对象,其控制规律为

式中,Kp为控制器的比例系数;Ti为控制器的积分时间,也称积分系数;Td为控制器的微分时间,也称微分系数。
数字PID位置型控制算法为了用数字形式的差分方程代替连续系统的微分方程,便于计算机实现,为此将积分式和微分项近似用求和及增量式表示,即
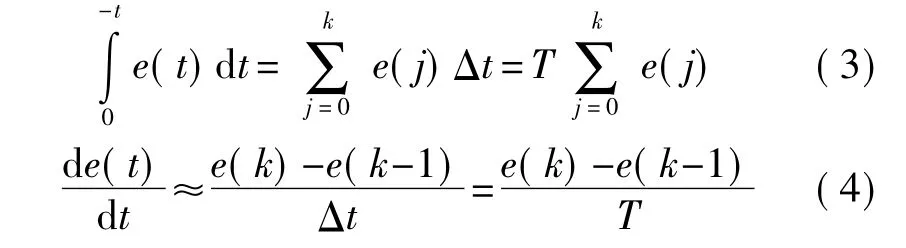
将式(3)和式(4)代入式(2),即可得到离散的PID表达式,为

3.2 分段设置PID参数的PID算法实现
PID调整时,由于过阻尼情况下,虽然无超调,但是过程缓慢,因此为了减少调节时间,一般选用欠阻尼情况,即有超调存在的情况,如图6所示的PID调整曲线图。曲线经过几个振荡周期调整后进入稳态,即可视为到达设定值,如图6所示的红点处。实际应用时,可将第n次(n由PID参数决定,波动进入误差范围内即可)经过设定值的点视为到达设定值的点,即为开始定时的点。
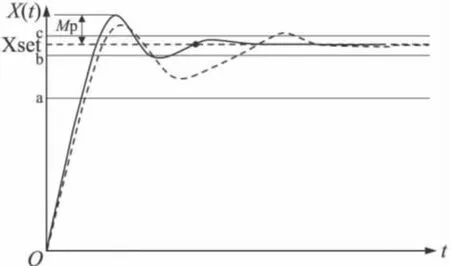
图6 PID控制的调整曲线
系统控制的目标温度在95℃到125℃之间,探头暴露在空气中,因此,探头的温度受环境温度影响较大,加上探头材料的特性,其调整曲线往往会出现如图6所示的虚曲线的情况:上升过程中,PID算法的调整使探头温度升高,而环境温度使之温度下降,随着温度越来越接近设定值,温度升高的能力越来越小,使之降温的能力不变,因此其超调量往往会比较小;但是,下降过程中,相同PID参数时,只有在温度低于设定值后PID才会控制其慢慢加热,而这段时间探头受环境温度影响很大,温度下降得很快,因此会出现振荡负幅值比正幅值大很多的情况。负幅值很大,则相应的,再次上升到目标值所需的时间会拉长。因此这种情况下,调节时间也会相应地加长。
为了克服这种情况,我们采用了分段设置PID参数的方法,其中,a、b、c是3个根据实际应用情况取的阈值:
(1)X(t)<a时,即与设定值的偏差很大时,要求快速上升,减小偏差,起主要作用的是比例系数,此时,比例系数P可以取得很大;而积分系数的作用是消除稳态误差,微分系数的作用是改善系统的动态性能,都可以忽略。
(2)当a<X(t)<Xset时,偏差在一定范围内后使用P、I、D同时控制,根据实际情况调节三者的值达到最佳控制效果。其中b为中间的一个分段阈值,起到相当于粗调和微调的分界线作用,当X(t)<b时,比例系数稍微可以大一点;当X(t)>b后,减小比例系数,增大积分系数,使其缓慢上升。
(3)当X(t)>Xset时,不同于传统PID控制,一旦大于设定值就不再加热,我们设定了一个阈值c,到达c以后才不再加热,这样能在一定程度上补偿环境温度;类似,传统PID要等到温度下降到设定值后才开始加热,而我们使其低于c值后就开始加热来补偿环境温度的影响。
这种分段设置PID参数的方法带来的影响就是会使最大超调量增大,但是在我们这个系统的应用中,最大超调量的影响并不大,所以可以忽略。
4 实验与讨论
测试实验中,我们以95℃为目标温度。用传统的统一PID参数的方法,经参数调整后得到的结果如图7(a)所示;用分段设置PID参数的方法得到的结果如图7(b)所示;两种方法对比实验数据如表1所示。
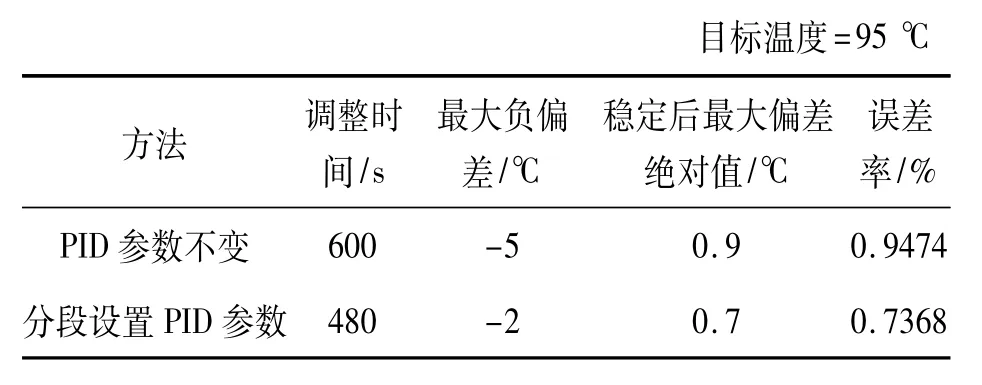
表1 PID参数不变情况和分段设置PID参数情况对比
从图7和表1中,我们可以看出,统一PID的方法从38℃加热到95℃需要的时间约为采集600个采样点的时间,而分段设置PID参数的方法约为采集480个采样点的时间。因此,分段设置PID参数的方法有效地缩短了调节时间,而且很好地克服了由于环境温度带来的影响。
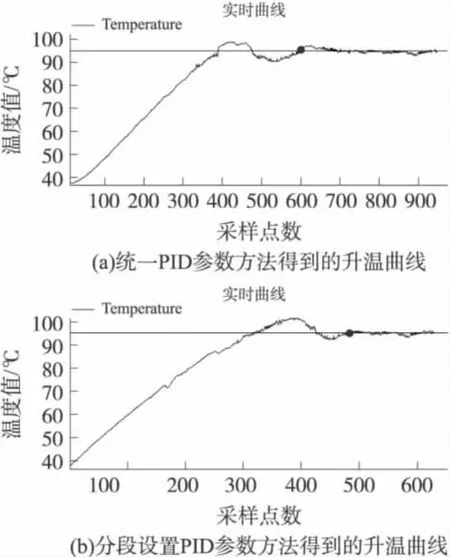
图7 不同方法得到的升温曲线
需要特别说明的是,到达稳定值(图中黑点处)后定时器启动,保持设定的时间,而探头也是在这段时间内工作,因此,最大超调对它的影响并不重要,重要的是后面的稳定程度。根据是实验可知,定时开始后,曲线仍然会有微小的波动,波动<±0.7℃,满足热极探头的温度要求。
5 总结
本文设计了一种用于妇科术后凝血用的热极探头的温度控制系统,系统基于MSP430F149单片机,采用高精度、高灵敏度的薄膜铂电阻测温元件和桥式电路、仪用放大器放大采集温度信号,分段设置PID参数的控制方法调节控制继电器的通断来控制加热管加热。此外,系统中还加入了目标温度设置、定时时间设置、实时温度显示、过热报警、过流保护等功能,使热极探头灵活可靠。
根据实际应用情况,系统控制用使用了分段设置PID参数的控制方法,一定程度上缩短了调节时间,补偿了环境温度造成的影响,取得了较满意的效果。
[1]Protell R I,Rubin C E,Aurh D C,et al.The Heater Probe:A New Endoscopic Method for Stopping Massive Gastrointestinal Bleeding[J].Gastroenterology,1978,74(2 Pt 1):257-62.
[2]罗奎良.国内热极治疗的实验研究和临床应用近况[J].右江民族医学院学报,2000,22(1):124.
[3]王小平,蒋键,宋茂海,等.HP-A内镜热极治疗仪的研制和临床应用[J].医疗卫生装备,2006,27(7):25-26.
[4]Spyros Michopoulos,Panayotis Tsibouris,Helias Bouzakis,et al.Complete Regression of Barrett’s Esophagus with Heat Probe Thermocoagulation:Mid-Term Results[J].Gastrointestinal Endoscopy,1999,50(2):165-172.
[5]刘堃.内镜下热极治疗非静脉曲张性上消化道初学临床分析[J].中国实用医药,2010,5(18):86-87
[6]段长习.基于430单片机的温度检测系统的设计与实现[J].科技创新导报,2008,24:52,54.
[7]马江涛.单片机温度控制系统的设计及实现[J].计算机测量与控制,2004,12(12):1219-1221,1229.
[8]李龙,韩震宇,刘丽,等.一种是用铂热电阻测温电路[J].工业仪表与自动化装置,2007,01:43-46.
[9]王利恒,李昌禧.热式气体流量计温度补偿研究[J].传感技术学报,2008,21(8):1379-1382.
[10]鲍可进.PID参数整定的温度控制[J].江苏理工大学学报,1995,16(6):74-78.
[11]李涛,王圆妹.基于PWM的模糊PID温度控制系统研究[J].自动化技术与应用,2008,27(10):32-34.
[12]夏大勇,周晓辉,赵增,等.MCS-51单片机温度控制系统[J].工业仪表与自动化装置,2007,01:43-46.
[13]Shiuh-Jer Huang,Yi-Ho Lo.Metal Chamber Temperature Control by Using Fuzzy PID Gain Auto-Tuning Strategy[J].WSEAS Transactions on Systems and Control,2009,4(1):1-10.
[14]周良,黎海文,吴一辉.具有温度补偿的小型生化分析仪温度控制系统的研究[J].传感技术学报,2008,21(11):1831-1834.